1.本发明属于工程测量技术领域,尤其涉及一种多功能的工程测量用无人机遥感装置以及使用方法。
背景技术:
2.工程测量(engineeringsurvey)是指工程建设中的所有测绘工作的统称,包括工程建设勘测、设计、施工和管理阶段所进行的各种测量工作;工程测量中,多使用的测量测绘装置,是采用固定架固定位置通过测量仪进行测量工作,通过配合标尺结构可以进行精准测量测绘工作,而随着技术的发展,工程测量测绘装置也是有着一定的需求。
3.目前工程测量用无人机遥感装置在工程测量中应用较为广泛。
4.但是,现有的工程测量用无人机遥感装置存在着使用操作方法不便捷,无法对遥感器进行位置调节影响测量效果,防护效果差影响测量稳定性和不具备高空作业警示功能问题。
5.因此,发明一种多功能的工程测量用无人机遥感装置以及使用方法显得非常必要。
技术实现要素:
6.为了解决上述技术问题,本发明提供一种多功能的工程测量用无人机遥感装置以及使用方法,以解决现有的工程测量用无人机遥感装置存在着使用操作方法不便捷,无法对遥感器进行位置调节影响测量效果,防护效果差影响测量稳定性和不具备高空作业警示功能的问题,一种多功能的工程测量用无人机遥感装置,包括无人机体,机翼,电动机,螺旋桨,保护罩,速度传感器,支撑腿,遥感器,旋转式可调节遥感检测杆结构,无人机坠落保护气囊结构和高空作业警示板结构,所述的无人机体上部外侧四角部位均螺栓连接有机翼;所述的机翼下部外侧螺栓连接有电动机;所述的电动机的输出轴上端键连接有螺旋桨;所述的螺旋桨外部罩接有保护罩;所述的保护罩与机翼外端螺栓连接设置;所述的无人机体下部外侧四角部位均螺钉连接有速度传感器;所述的无人机体底部四角部位均螺栓连接有支撑腿;所述的遥感器与旋转式可调节遥感检测杆结构相连接;所述的无人机坠落保护气囊结构和无人机体相连接;所述的高空作业警示板结构和无人机体相连接;所述的旋转式可调节遥感检测杆结构包括直线滑轨,回型滑块,升降架,旋转电机和伸缩推杆,所述的直线滑轨外壁滑动套接有回型滑块;所述的回型滑块之间的内侧螺栓连接有升降架;所述的升降架上部中间部位螺栓连接有旋转电机;所述的直线滑轨内侧螺栓连接有伸缩推杆。
7.优选地,所述的无人机坠落保护气囊结构设置有两个,均包括气囊,反光条,防护拉绳,充气管,充气泵和进气管,所述的气囊外表面左右两侧均粘贴有反光条;所述的气囊左右两端均系接有防护拉绳;所述的充气泵上部出口处螺纹连接有充气管,下部进口处螺纹连接有进气管。
8.优选地,所述的高空作业警示板结构包括立柱,警示条,电池组,警示灯排和供电
板,所述的立柱左右两表面均粘贴有警示条;所述的立柱上端螺栓连接有电池组;所述的电池组前后两表面均螺钉连接有警示灯排;所述的电池组上表面螺钉连接有供电板。
9.优选地,所述的伸缩推杆的输出杆下端螺栓连接升降架上部。
10.优选地,所述的旋转电机的输出轴贯穿升降架内部中间部位,并且螺栓连接遥感器上部中间部位。
11.优选地,所述的直线滑轨均纵向上端螺栓连接在无人机体底部左右两侧。
12.优选地,所述的充气管上端螺纹连接气囊下部中间部位进口处。
13.一种多功能的工程测量用无人机遥感装置的使用方法具体包括以下步骤:
14.步骤一:检测系统并进行调试升空作业,通过遥控器控制无人机体驱动电动机动作,并使得螺旋桨旋转,进行高空作业操作,并通过速度传感器进行检测无人机下降或者上升速度,实时向无人机体内部输送信号,以备进行安全降落操作,经过遥感器进行工程测量作业,经过系统检查无误后,进行高空测量操作;
15.步骤二:遥感位置调节旋转测量作业,测量作业中,可通过旋转电机带动遥感器旋转,进行旋转测量操作,通过伸缩推杆带动回型滑块在直线滑轨外壁移动,并使得升降架动作,可改变遥感器的位置,以备进行多位置测量作业;
16.步骤三:无人机突然坠落充气保护作业,经过速度传感器实时检测无人机下落速度,若发生速度过快情况,可通过充气泵迅速动作,经过充气管向气囊内部充气,即可进行安全漂浮辅助操作,经过防护拉绳进行拉持,使得无人机安全降落,经过反光条进行安全提示作业;
17.步骤四:高空作业警示提示作业,高空测量作业时,可通过供电板不断进行光电转换,经过电池组进行蓄电放电,可使得警示灯排进行闪烁警示作业,通过警示条增加警示效果。
18.与现有技术相比,本发明具有如下有益效果:本发明直线滑轨,回型滑块,升降架,旋转电机和伸缩推杆,可进行升降调节,便于进行测量作业,满足需求,并可进行旋转调节,保证测量效果;本发明气囊,反光条,防护拉绳,充气管,充气泵和进气管,可进行紧急快速充气作业,以备无人机进行安全降落作业,避免发生突降造成损伤;本发明立柱,警示条,电池组,警示灯排和供电板,可进行高空作业警示作业,以保证无人机遥感测量效果;本发明无人机体,机翼,电动机和螺旋桨,可保证升降效率;本发明保护罩,可保证螺旋桨安全性,避免发生损伤;本发明速度传感器,可实时检测无人机工作状态,保证下降或者升空稳定性;本发明支撑腿,可保证无人机落地支撑稳定性。
附图说明
19.图1是本发明的多功能的工程测量用无人机遥感装置的使用方法的流程图。
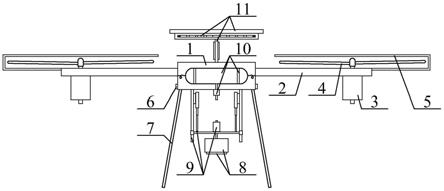
20.图2是本发明的整体的结构示意图。
21.图3是本发明的旋转式可调节遥感检测杆结构的结构示意图。
22.图4是本发明的无人机坠落保护气囊结构的结构示意图。
23.图5是本发明的高空作业警示板结构的结构示意图。
24.图中:
25.1、无人机体;2、机翼;3、电动机;4、螺旋桨;5、保护罩;6、速度传感器;7、支撑腿;8、
遥感器;9、旋转式可调节遥感检测杆结构;91、直线滑轨;92、回型滑块;93、升降架;94、旋转电机;95、伸缩推杆;10、无人机坠落保护气囊结构;101、气囊;102、反光条;103、防护拉绳;104、充气管;105、充气泵;106、进气管;11、高空作业警示板结构;111、立柱;112、警示条;113、电池组;114、警示灯排;115、供电板。
具体实施方式
26.以下结合附图对本发明做进一步描述:
27.图中:
28.如附图2至附图3所示
29.一种多功能的工程测量用无人机遥感装置,包括无人机体1,机翼2,电动机3,螺旋桨4,保护罩5,速度传感器6,支撑腿7,遥感器8,旋转式可调节遥感检测杆结构9,无人机坠落保护气囊结构10和高空作业警示板结构11,所述的无人机体1上部外侧四角部位均螺栓连接有机翼2;所述的机翼2下部外侧螺栓连接有电动机3;所述的电动机3的输出轴上端键连接有螺旋桨4;所述的螺旋桨4外部罩接有保护罩5;所述的保护罩5与机翼2外端螺栓连接设置;所述的无人机体1下部外侧四角部位均螺钉连接有速度传感器6;所述的无人机体1底部四角部位均螺栓连接有支撑腿7;所述的遥感器8与旋转式可调节遥感检测杆结构9相连接;所述的无人机坠落保护气囊结构10和无人机体1相连接;所述的高空作业警示板结构11和无人机体1相连接;所述的旋转式可调节遥感检测杆结构9包括直线滑轨91,回型滑块92,升降架93,旋转电机94和伸缩推杆95,所述的直线滑轨91外壁滑动套接有回型滑块92;所述的回型滑块92之间的内侧螺栓连接有升降架93;所述的升降架93上部中间部位螺栓连接有旋转电机94;所述的直线滑轨91内侧螺栓连接有伸缩推杆95。
30.具体实施方案中,结合附图4所示,所述的无人机坠落保护气囊结构10设置有两个,均包括气囊101,反光条102,防护拉绳103,充气管104,充气泵105和进气管106,所述的气囊101外表面左右两侧均粘贴有反光条102;所述的气囊101左右两端均系接有防护拉绳103;所述的充气泵105上部出口处螺纹连接有充气管104,下部进口处螺纹连接有进气管106。
31.具体实施方案中,结合附图5所示,所述的高空作业警示板结构11包括立柱111,警示条112,电池组113,警示灯排114和供电板115,所述的立柱111左右两表面均粘贴有警示条112;所述的立柱111上端螺栓连接有电池组113;所述的电池组113前后两表面均螺钉连接有警示灯排114;所述的电池组113上表面螺钉连接有供电板115。
32.具体实施方案中,所述的充气泵105均螺栓连接在无人机体1底部前后两侧中间部位。
33.具体实施方案中,所述的气囊101设置在无人机体1前后两表面中间部位,所述的气囊101采用橡胶囊。
34.具体实施方案中,所述的防护拉绳103采用尼龙拉绳,并且均系接在无人机体1前表面左右两侧中间部位以及后表面左右两侧中间部位。
35.具体实施方案中,所述的反光条102采用两个黄白相间的荧光条。
36.具体实施方案中,所述的立柱111纵向下端螺纹连接在无人机体1上部中间部位。
37.具体实施方案中,所述的警示条112采用两个黄白相间的荧光条。
38.具体实施方案中,所述的警示灯排114,电池组113和供电板115之间串联导线连接设置。
39.具体实施方案中,所述的警示灯排114采用红蓝相间的led灯排。
40.具体实施方案中,所述的电池组113采用12v可充电锂离子蓄电池组。
41.具体实施方案中,所述的供电板115采用单晶硅太阳能电池板。
42.具体实施方案中,所述的电动机3,速度传感器6,充气泵105,旋转电机94和伸缩推杆95均与无人机体1导线连接设置。
43.具体实施方案中,所述的电动机3采用775型电动机。
44.具体实施方案中,所述的旋转电机94采用12v小型正反转90
°
的步进电机。
45.具体实施方案中,所述的伸缩推杆95采用lx600型电动推杆。
46.具体实施方案中,所述的速度传感器6采用gy521型速度检测传感器。
47.具体实施方案中,所述的充气泵105采用js555no1pm型快速充气泵。
48.具体实施方案中,所述的无人机体1无线信号连接遥控器。
49.具体实施方案中,所述的遥感器8无线信号连接计算机服务器。
50.一种多功能的工程测量用无人机遥感装置的使用方法具体包括以下步骤:
51.具体参照说明书附图1所示:
52.s101:检测系统并进行调试升空作业,通过遥控器控制无人机体1驱动电动机3动作,并使得螺旋桨4旋转,进行高空作业操作,并通过速度传感器6进行检测无人机下降或者上升速度,实时向无人机体1内部输送信号,以备进行安全降落操作,经过遥感器8进行工程测量作业,经过系统检查无误后,进行高空测量操作;
53.s102:遥感位置调节旋转测量作业,测量作业中,可通过旋转电机94带动遥感器8旋转,进行旋转测量操作,通过伸缩推杆95带动回型滑块92在直线滑轨91外壁移动,并使得升降架93动作,可改变遥感器8的位置,以备进行多位置测量作业;
54.s103:无人机突然坠落充气保护作业,经过速度传感器6实时检测无人机下落速度,若发生速度过快情况,可通过充气泵105迅速动作,经过充气管104向气囊101内部充气,即可进行安全漂浮辅助操作,经过防护拉绳103进行拉持,使得无人机安全降落,经过反光条102进行安全提示作业;
55.s104:高空作业警示提示作业,高空测量作业时,可通过供电板115不断进行光电转换,经过电池组113进行蓄电放电,可使得警示灯排114进行闪烁警示作业,通过警示条112增加警示效果。
56.工作原理
57.本发明,具体包括以下步骤:
58.步骤一:检测系统并进行调试升空作业,通过遥控器控制无人机体1驱动电动机3动作,并使得螺旋桨4旋转,进行高空作业操作,并通过速度传感器6进行检测无人机下降或者上升速度,实时向无人机体1内部输送信号,以备进行安全降落操作,经过遥感器8进行工程测量作业,经过系统检查无误后,进行高空测量操作;
59.步骤二:遥感位置调节旋转测量作业,测量作业中,可通过旋转电机94带动遥感器8旋转,进行旋转测量操作,通过伸缩推杆95带动回型滑块92在直线滑轨91外壁移动,并使得升降架93动作,可改变遥感器8的位置,以备进行多位置测量作业;
60.步骤三:无人机突然坠落充气保护作业,经过速度传感器6实时检测无人机下落速度,若发生速度过快情况,可通过充气泵105迅速动作,经过充气管104向气囊101内部充气,即可进行安全漂浮辅助操作,经过防护拉绳103进行拉持,使得无人机安全降落,经过反光条102进行安全提示作业;
61.步骤四:高空作业警示提示作业,高空测量作业时,可通过供电板115不断进行光电转换,经过电池组113进行蓄电放电,可使得警示灯排114进行闪烁警示作业,通过警示条112增加警示效果。
62.利用本发明所述的技术方案,或本领域的技术人员在本发明技术方案的启发下,设计出类似的技术方案,而达到上述技术效果的,均是落入本发明的保护范围。