1.本实用新型涉及无人机摄像头防抖技术领域,尤其涉及一种无人机防抖云台。
背景技术:
2.无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的飞行设备。随着技术的日新月异,无人机得到迅速的发展,广泛应用于民用、商用及军事领域的各行各业。在民用领域,越来越多的极限运动爱好者使用无人机进行摄录;在商用领域,除搭载摄像设备对各项体育赛事进行跟踪航拍以外;无人机也已进入物流行业,可以将货物送往人力配送较难、较慢的偏远地区。无人机有着广泛的应用范围及广阔的市场前景;应用范围包括航拍、农业、植保、自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾、影视拍摄等。
3.现有的无人机在山区进行作业时,由于山区气候恶劣,无人机常会收到山区气流的影响导致无规律地颠簸,导致镜头晃动,虽然现有的摄像设备带有光学防抖功能,但是在山区遭受横向风影响时,防抖效果较差,拍摄效果受到影响。
技术实现要素:
4.本实用新型的目的是提供一种无人机防抖云台,为实现上述目的采取方案如下:
5.一种无人机防抖云台,包括:连接座、丝杆、无刷电机、调平脚、万向接头、相机座、控制盒、螺旋仪、译码器、控制器、蓄电池和置物篮,所述连接座的顶部设有与无人机本体连接的螺孔,连接座安装有三根丝杆,三根丝杆形成三角形结构,丝杆分别通过传动结构由单独的无刷电机驱动,无刷电机安装在连接座内,丝杆的底部通过轴承安装有调平脚,相机座位于三根丝杆中间,相机座通过三个万向接头与调平脚连接,控制盒安装在相机座底部,螺旋仪、译码器、控制器和蓄电池均安装在控制盒内,置物篮与相机座底部铰接,螺旋仪与译码器电性连接,译码器与控制器的输入端连接,控制器的输出端与无刷电机连接,蓄电池分别与无刷电机、螺旋仪、译码器和控制器电性连接。
6.进一步地,所述传动结构由安装在连接座内的丝杆螺母和安装在无刷电机输出轴上的伞形齿轮组成,丝杆螺母与伞形齿轮啮合。
7.本实用新型的优点:
8.(1)本实用新型采用螺旋仪感应云台的晃动方向及加速度,控制器控制对应的无刷电机转速和转动时间,从而使丝杆上升或下降,令相机座尽可能保持水平,反应速度快,精度高,减少晃动对拍摄的影响。
9.(2)本实用新型采用万向接头连接丝杆和相机座,方便作业人员在作业之前调平相机座,不需要拆卸调整,缩减调平时间,提高工作效率。
10.(3)本实用新型在相机座底部铰接可置物的置物篮,置物篮可以起到下降整体重心的作用,同时拓展无人机的搭载功能。
附图说明
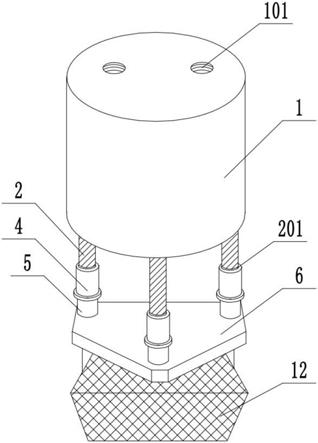
11.图1为本实用新型的结构示意图;
12.图2为本实用新型的侧剖面示意图;
13.图中各标识含义如下:
[0014]1‑
连接座;2
‑
丝杆;3
‑
无刷电机;4
‑
调平脚;5
‑
万向接头;6
‑
相机座;7
‑
控制盒;8
‑
螺旋仪;9
‑
译码器;10
‑
控制器;11
‑
蓄电池;12
‑
置物篮;13
‑
传动结构;101
‑
螺孔;201
‑
轴承;1301
‑
丝杆螺母;1302
‑
伞形齿轮。
具体实施例
[0015]
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
[0016]
一种无人机防抖云台,包括:连接座1、丝杆2、无刷电机3、调平脚4、万向接头5、相机座6、控制盒7、螺旋仪8、译码器9、控制器10、蓄电池11和置物篮12,所述连接座1的顶部设有与无人机本体连接的螺孔101,连接座1安装有三根丝杆2,三根丝杆2形成三角形结构,丝杆2分别通过传动结构13由单独的无刷电机3驱动,无刷电机3安装在连接座1内,丝杆2的底部通过轴承201安装有调平脚4,相机座6位于三根丝杆2中间,相机座6通过三个万向接头5与调平脚4连接,控制盒7安装在相机座6底部,螺旋仪8、译码器9、控制器10和蓄电池11均安装在控制盒7内,置物篮12与相机座6底部铰接,螺旋仪8与译码器9电性连接,译码器9与控制器10的输入端连接,控制器10的输出端与无刷电机3连接,蓄电池11分别与无刷电机3、螺旋仪8、译码器9和控制器10电性连接。
[0017]
优选地情况下,所述传动结构13由安装在连接座1内的丝杆螺母1301和安装在无刷电机3输出轴上的伞形齿轮1302组成,丝杆螺母1301与伞形齿轮1302啮合。
技术特征:
1.一种无人机防抖云台,其特征在于,包括:连接座(1)、丝杆(2)、无刷电机(3)、调平脚(4)、万向接头(5)、相机座(6)、控制盒(7)、螺旋仪(8)、译码器(9)、控制器(10)、蓄电池(11)和置物篮(12),所述连接座(1)的顶部设有与无人机本体连接的螺孔(101),连接座(1)安装有三根丝杆(2),三根丝杆(2)形成三角形结构,丝杆(2)分别通过传动结构(13)由单独的无刷电机(3)驱动,无刷电机(3)安装在连接座(1)内,丝杆(2)的底部通过轴承(201)安装有调平脚(4),相机座(6)位于三根丝杆(2)中间,相机座(6)通过三个万向接头(5)与调平脚(4)连接,控制盒(7)安装在相机座(6)底部,螺旋仪(8)、译码器(9)、控制器(10)和蓄电池(11)均安装在控制盒(7)内,置物篮(12)与相机座(6)底部铰接,螺旋仪(8)与译码器(9)电性连接,译码器(9)与控制器(10)的输入端连接,控制器(10)的输出端与无刷电机(3)连接,蓄电池(11)分别与无刷电机(3)、螺旋仪(8)、译码器(9)和控制器(10)电性连接。2.根据权利要求1所述的无人机防抖云台,其特征在于:所述传动结构(13)由安装在连接座(1)内的丝杆螺母(1301)和安装在无刷电机(3)输出轴上的伞形齿轮(1302)组成,丝杆螺母(1301)与伞形齿轮(1302)啮合。
技术总结
一种无人机防抖云台,包括:连接座、丝杆、无刷电机、调平脚、万向接头、相机座、控制盒、螺旋仪、译码器、控制器、蓄电池和置物篮,本实用新型采用螺旋仪感应云台的晃动方向及加速度,控制器控制对应的无刷电机转速和转动时间,从而使丝杆上升或下降,令相机座尽可能保持水平,反应速度快,精度高,减少晃动对拍摄的影响。响。响。
技术研发人员:曾淋
受保护的技术使用者:广西玉林华飞网络科技有限公司
技术研发日:2021.07.10
技术公布日:2021/12/21