1.本发明涉及一种能垂直起飞和降落的螺旋桨直升机,尤其是占用面积小的和安全性高的偏转螺旋桨直升机。
背景技术:
2.目前公知的能垂直起飞和降落的螺旋桨直升机有四螺旋桨直升机,它具有结构简单,可靠性较高的优点,但它依靠左右设置的螺旋桨操纵横向的稳定,一旦横向有一个螺旋桨故障,就失去横向稳定,它依靠前后设置的螺旋桨操纵纵向的稳定,一旦纵向有一个螺旋桨故障,就失去纵向稳定,四螺旋桨直升机,只要其中任意一个螺旋桨故障,就失去稳定性,螺旋桨占用的空间大,不能在狭窄的空间飞行。
技术实现要素:
3.为了克服四螺旋桨直升机,只要其中任意一个螺旋桨故障,就失去稳定性,螺旋桨占用的空间大,不能在狭窄的空间飞行的缺点,本发明提供一种偏转螺旋桨直升机,实现这一目标。
4.本发明解决其技术问题所采用的技术方案是:在机身顶部、偏转螺旋桨直升机重心前纵向设置一条前竖直柱,在前竖直柱的顶部纵向设置一个轴承;在机身顶部、偏转螺旋桨直升机重心后纵向设置一条后竖直柱,在后竖直柱的顶部纵向设置一个轴承。
5.设置第一纵向转动轴水平安装在前竖直柱的顶部纵向轴承和后竖直柱的顶部纵向轴承内,第一纵向转动轴在两个轴承内可以绕纵向转动,在第一纵向转动轴的后端设置第一横向摇臂,在第一横向摇臂上铰接第一竖直拉杆,在第一纵向转动轴的中部上面设置第一电机安装座,在第一电机安装座上安装第一电机,在第一电机上安装第一螺旋桨,第一纵向转动轴的中部第一电机安装座的下面设置第二电机安装座,在第二电机安装座上安装第二电机,在第二电机上安装第二螺旋桨,第一螺旋桨是拉力螺旋桨,第二螺旋桨是推力螺旋桨,第一螺旋桨的旋转面和第二螺旋桨的旋转面平行,当第一螺旋桨的旋转面和第二螺旋桨的旋转面水平时,第一横向摇臂水平向右。
6.在机身顶部、偏转螺旋桨直升机重心横向左边设置一条左竖直柱,在左竖直柱的顶部纵向设置一个轴承;在机身顶部、偏转螺旋桨直升机重心横向右边设置一条右竖直柱,在右竖直柱的顶部纵向设置一个轴承。
7.设置第一横向转动轴水平安装在左竖直柱的顶部纵向轴承和右竖直柱的顶部纵向轴承内,第一横向转动轴在两个轴承内可以绕横向转动,在第一横向转动轴的右端设置第一纵向摇臂,在第一纵向摇臂上铰接第二竖直拉杆,在第一横向转动轴的中部上面设置第三电机安装座,在第三电机安装座上安装第三电机,在第三电机上安装第三螺旋桨,第一横向转动轴的中部第三电机安装座的下面设置第四电机安装座,在第四电机安装座上安装第四电机,在第四电机上安装第四螺旋桨,第三螺旋桨是拉力螺旋桨,第四螺旋桨是推力螺旋桨,第三螺旋桨的旋转面和第四螺旋桨的旋转面平行,当第三螺旋桨的旋转面和第四螺
旋桨的旋转面水平时,第一纵向摇臂水平向后。
8.前竖直柱的高度和后竖直柱的高度相同,左竖直柱的高度和右竖直柱的高度相同,前竖直柱、后竖直柱的高度比左竖直柱、右竖直柱的高度高。
9.第一纵向转动轴的高度比第一横向转动轴的高度高。
10.第一横向摇臂的高度比第一纵向摇臂的高度高。
11.第一螺旋桨的旋转面高度比第二螺旋桨的旋转面高度高,第二螺旋桨的旋转面高度高比第三螺旋桨的旋转面高度高,第三螺旋桨的旋转面高度比第四螺旋桨的旋转面高度高。
12.操纵第一竖直拉杆和第二竖直拉杆,使第一横向摇臂和第一纵向摇臂处于水平,第一螺旋桨的旋转面和第二螺旋桨的旋转面处于水平、第三螺旋桨的旋转面和第四螺旋桨的旋转面处于水平,这时,第一螺旋桨的旋转中心和第二螺旋桨的旋转中心、第三螺旋桨的旋转中心和第四螺旋桨的旋转中心的连线是一条垂直于水平面的直线,设置偏转螺旋桨直升机重心在这条直线上。
13.偏转螺旋桨直升机的宽度不超过两个螺旋桨的直径,偏转螺旋桨直升机机身窄长。
14.在机身下、偏转螺旋桨直升机重心附近设置起落架,这就构成了偏转螺旋桨直升机。
15.以下说明偏转螺旋桨直升机的工作原理。
16.设第一螺旋桨逆时针转,第二螺旋桨顺时针转,第三螺旋桨逆时针转,第四螺旋桨顺时针转。
17.第一螺旋桨、第二螺旋桨、第三螺旋桨和第四螺旋桨是尺寸相同的定距螺旋桨,第一电机、第二电机、第三电机和第四电机大小相同。
18.操纵第一竖直拉杆和第二竖直拉杆,使第一横向摇臂和第一纵向摇臂处于水平,第一螺旋桨的旋转面和第二螺旋桨的旋转面处于水平、第三螺旋桨的旋转面和第四螺旋桨的旋转面处于水平,启动第一电机、第二电机、第三电机和第四电机,使第一螺旋桨、第二螺旋桨、第三螺旋桨和第四螺旋桨同时以相同的转速转动, 第一螺旋桨、第二螺旋桨的反扭矩相互抵消,第三螺旋桨、第四螺旋桨的反扭矩相互抵消,偏转螺旋桨直升机保持航向的稳定。
19.继续相同的增大第一螺旋桨、第二螺旋桨、第三螺旋桨和第四螺旋桨的转速,第一螺旋桨、第二螺旋桨、第三螺旋桨和第四螺旋桨的升力增大,当总升力大于偏转螺旋桨直升机的重量时偏转螺旋桨直升机垂直上升。
20.相同的减少第一螺旋桨、第二螺旋桨、第三螺旋桨和第四螺旋桨的转速,第一螺旋桨、第二螺旋桨、第三螺旋桨和第四螺旋桨的升力减少,当总升力等于偏转螺旋桨直升机的重量时偏转螺旋桨直升机悬停。
21.继续相同的减少第一螺旋桨、第二螺旋桨、第三螺旋桨和第四螺旋桨的转速,第一螺旋桨、第二螺旋桨、第三螺旋桨和第四螺旋桨的升力减少,当总升力小于偏转螺旋桨直升机的重量时偏转螺旋桨直升机垂直下降。
22.当偏转螺旋桨直升机在空中,操纵第一竖直拉杆向下拉动第一横向摇臂,第一横向摇臂向右下方向倾斜,带动第一纵向转动轴向右转动,使第一螺旋桨和第二螺旋桨的旋
转面向右倾斜,第一螺旋桨和第二螺旋桨的升力向右倾斜,偏转螺旋桨直升机向右横滚;操纵第一竖直拉杆向上推动第一横向摇臂,第一横向摇臂向左上方向倾斜,带动第一纵向转动轴向左转动,使第一螺旋桨和第二螺旋桨的旋转面向左倾斜,第一螺旋桨和第二螺旋桨的升力向左倾斜,偏转螺旋桨直升机向左横滚,实现操纵横滚。
23.当偏转螺旋桨直升机在空中,操纵第二竖直拉杆向下拉动第一纵向摇臂,第一纵向摇臂向后下方向倾斜,带动第一横向转动轴向后转动,使第三螺旋桨和第四螺旋桨的旋转面向后倾斜,第三螺旋桨和第四螺旋桨的升力向后倾斜,偏转螺旋桨直升机后仰;操纵第二竖直拉杆向上推动第一纵向摇臂,第一纵向摇臂向前方向倾斜,带动第一横向转动轴向前转动,使第三螺旋桨和第四螺旋桨的旋转面向前倾斜,第三螺旋桨和第四螺旋桨的升力向前倾斜,偏转螺旋桨直升机前府,实现俯仰操纵。
24.当偏转螺旋桨直升机在空中,增大第一螺旋桨和第三螺旋桨的转速,第一螺旋桨和第三螺旋桨的升力增大,逆时针转的第一螺旋桨和第三螺旋桨的反扭矩增大,同时,减少第二螺旋桨和第四螺旋桨的转速,第二螺旋桨和第四螺旋桨的升力减少,顺时针转的第二螺旋桨和第四螺旋桨反扭矩减少,逆时针转的第一螺旋桨和第三螺旋桨的反扭矩使偏转螺旋桨直升机顺时针转,即向右转向;减少第一螺旋桨和第三螺旋桨的转速,第一螺旋桨和第三螺旋桨的升力减少,逆时针转的第一螺旋桨和第三螺旋桨的反扭矩减少,同时,增大第二螺旋桨和第四螺旋桨的转速,第二螺旋桨和第四螺旋桨的升力增大,顺时针转的第二螺旋桨和第四螺旋桨反扭矩增大,顺时针转的第二螺旋桨和第四螺旋桨反扭矩使偏转螺旋桨直升机逆时针转,即向左转向,实现航向操纵。
25.当偏转螺旋桨直升机在空中,操纵偏转螺旋桨直升机前府,并同时增大第一螺旋桨、第二螺旋桨、第三螺旋桨和第四螺旋桨的转速,偏转螺旋桨直升机向前飞行。
26.操纵偏转螺旋桨直升机前府和向左转向,并同时增大第一螺旋桨、第二螺旋桨、第三螺旋桨和第四螺旋桨的转速,偏转螺旋桨直升机向左前方飞行。
27.操纵偏转螺旋桨直升机前府和向右转向,并同时增大第一螺旋桨、第二螺旋桨、第三螺旋桨和第四螺旋桨的转速,偏转螺旋桨直升机向右前方飞行。
28.操纵偏转螺旋桨直升机后仰,并同时增大第一螺旋桨、第二螺旋桨、第三螺旋桨和第四螺旋桨的转速,偏转螺旋桨直升机向后飞行。
29.操纵偏转螺旋桨直升机向左横滚,并同时增大第一螺旋桨、第二螺旋桨、第三螺旋桨和第四螺旋桨的转速,偏转螺旋桨直升机向左侧飞行。
30.操纵偏转螺旋桨直升机向右横滚,并同时增大第一螺旋桨、第二螺旋桨、第三螺旋桨和第四螺旋桨的转速,偏转螺旋桨直升机向右侧飞行。
31.第一螺旋桨和第二螺旋桨共同操纵偏转螺旋桨直升机的横滚。
32.第三螺旋桨和第四螺旋桨共同操纵偏转螺旋桨直升机的俯仰。
33.第一螺旋桨、第二螺旋桨、第三螺旋桨和第四螺旋桨共同操纵偏转螺旋桨直升机的航向。
34.当第一螺旋桨出现故障,第二螺旋桨操纵偏转螺旋桨直升机的横滚,还能保持横向稳定,纵向稳定不受影响,航向稳定受到影响,依靠横向和纵向稳定垂直紧急迫降。
35.当第二螺旋桨出现故障,第一螺旋桨操纵偏转螺旋桨直升机的横滚,还能保持横向稳定,纵向稳定不受影响,航向稳定受到影响,依靠横向和纵向稳定垂直紧急迫降。
36.当第三螺旋桨出现故障,第四螺旋桨操纵偏转螺旋桨直升机的俯仰,还能保持纵向稳定,横向稳定不受影响,航向稳定受到影响,依靠横向和纵向稳定垂直紧急迫降。
37.当第四螺旋桨出现故障,第三螺旋桨操纵偏转螺旋桨直升机的俯仰,还能保持纵向稳定,横向稳定不受影响,航向稳定受到影响,依靠横向和纵向稳定垂直紧急迫降。
38.任意一个螺旋桨出现故障,依靠另外三个螺旋桨紧急迫降,提高了飞行的安全性。
39.本发明的有益效果是,偏转螺旋桨直升机机身窄长,偏转螺旋桨直升机整体宽度不超过两个螺旋桨的直径,占用的横向空间小,可在狭窄的空间飞行,第一螺旋桨和第二螺旋桨共同操纵偏转螺旋桨直升机的横滚,提高了操纵偏转螺旋桨直升机横滚的冗余度,第三螺旋桨和第四螺旋桨共同操纵偏转螺旋桨直升机的俯仰,提高了操纵偏转螺旋桨直升机俯仰的冗余度,任意一个螺旋桨出现故障,依靠另外三个螺旋桨紧急迫降,提高了飞行的安全性,偏转45
°
的螺旋桨放大了螺旋桨的升力,提高了螺旋桨的效率,适合成为个人飞行器,运输,农业作业等领域。
附图说明
40.下面结合附图和实施例对本发明进一步说明。
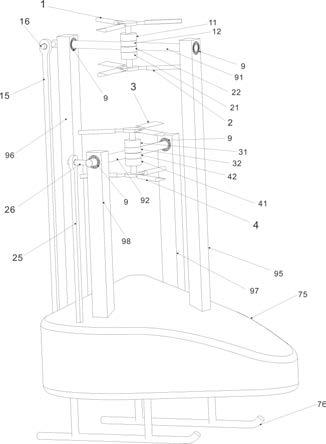
41.图1是本发明第一个实施例偏转螺旋桨直升机轴测图。
42.图2是本发明第二个实施例偏转螺旋桨直升机轴测图。
43.图3是本发明第三个实施例偏转螺旋桨直升机轴测图。
44.图4是本发明第四个实施例偏转螺旋桨直升机轴测图。
45.图5是本发明第四个实施例偏转螺旋桨直升机轴测图。
46.图6是本发明螺旋桨保护环的设置轴测图。
47.图中1.第一螺旋桨, 2.第二螺旋桨,3.第三螺旋桨,4.第四螺旋桨,5.第五螺旋桨,6.第六螺旋桨, 7.第七螺旋桨,8.第八螺旋桨, 9.轴承, 11.第一电机 ,12.第一电机安装座, 15.第一横向摇臂, 16.第一竖直拉杆, 21.第二电机,22.第二电机安装座, 25.第二竖直拉杆, 26.第一纵向摇臂,36.第二纵向摇臂, 35.第三竖直拉杆,45.第四竖直拉杆,46.第三纵向摇臂, 31.第三电机,32.第三电机安装座, 41.第四电机,42.第四电机安装座,51.第五电机,52.第五电机安装座,61.第六电机,62.第六电机安装座,65.第二横向转动轴,66.第三横向转动轴,71.第七电机,72.第七电机安装座, 75.机身,76.起落架,77.第一保护环,78.第二保护环,81.第八电机,82.第八电机安装座,91.第一纵向转动轴,92.第一横向转动轴,93.第一纵向固定轴,94.第二纵向固定轴,95.前竖直柱,96.后竖直柱,97.左竖直柱,98.右竖直柱。
具体实施方式
48.图1所示是本发明第一个实施例偏转螺旋桨直升机轴测图, 在机身75顶部、偏转螺旋桨直升机重心前纵向设置一条前竖直柱95,在前竖直柱95的顶部纵向设置轴承9;在机身75顶部、偏转螺旋桨直升机重心后纵向设置一条后竖直柱96,在后竖直柱96的顶部纵向设置轴承9。
49.设置第一纵向转动轴91水平安装在前竖直柱95的顶部纵向轴承9和后竖直柱96的顶部纵向轴承9内,第一纵向转动轴91在两个轴承内可以绕纵向转动,在第一纵向转动轴91
的后端设置第一横向摇臂16,在第一横向摇臂16上铰接第一竖直拉杆15,在第一纵向转动轴91的中部上面设置第一电机安装座12,在第一电机安装座12上安装第一电机11,在第一电机11上安装第一螺旋桨1,第一纵向转动轴91的中部第一电机安装座12的下面设置第二电机安装座22,在第二电机安装座22上安装第二电机21,在第二电机21上安装第二螺旋桨2,第一螺旋桨1是拉力螺旋桨,第二螺旋桨2是推力螺旋桨,设置第一螺旋桨1的旋转面和第二螺旋桨2的旋转面平行,当第一螺旋桨1的旋转面和第二螺旋桨2的旋转面水平时,第一横向摇臂16水平向右。
50.在机身75顶部、偏转螺旋桨直升机重心横向左边设置一条左竖直柱97,在左竖直柱97的顶部纵向设置轴承9;在机身75顶部、偏转螺旋桨直升机重心横向右边设置一条右竖直柱98,在右竖直柱98的顶部纵向设置轴承9。
51.设置第一横向转动轴92水平安装在左竖直柱97的顶部纵向轴承9和右竖直柱98的顶部纵向轴承9内,第一横向转动轴92在两个轴承9内可以绕横向转动,在第一横向转动轴92的右端设置第一纵向摇臂26,在第一纵向摇臂26上铰接第二竖直拉杆25,在第一横向转动轴92的中部上面设置第三电机安装座32,在第三电机安装座32上安装第三电机31,在第三电机31上安装第三螺旋桨3,第一横向转动轴92的中部第三电机安装座32的下面设置第四电机安装座42,在第四电机安装座42上安装第四电机41,在第四电机41上安装第四螺旋桨4,第三螺旋桨3是拉力螺旋桨,第四螺旋桨4是推力螺旋桨,设置第三螺旋桨3的旋转面和第四螺旋桨4的旋转面平行,当第三螺旋桨3的旋转面和第四螺旋桨4的旋转面水平时,第一纵向摇臂26水平向后。
52.前竖直柱95的高度和后竖直柱96的高度相同,左竖直柱97的高度和右竖直柱98的高度相同,前竖直柱95、后竖直柱96的高度比左竖直柱97、右竖直柱98的高度高。
53.第一纵向转动轴91的高度比第一横向转动轴92的高度高。
54.第一横向摇臂16的高度比第一纵向摇臂26的高度高。
55.第一螺旋桨1的旋转面高度比第二螺旋桨2的旋转面高度高,第二螺旋桨2的旋转面高度高比第三螺旋桨3的旋转面高度高,第三螺旋桨3的旋转面高度比第四螺旋桨4的旋转面高度高。
56.操纵第一竖直拉杆16和第二竖直拉杆25,使第一横向摇臂16和第一纵向摇臂26处于水平,第一螺旋桨1的旋转面和第二螺旋桨2的旋转面处于水平、第三螺旋桨3的旋转面和第四螺旋桨4的旋转面处于水平,这时,第一螺旋桨1的旋转中心和第二螺旋桨2的旋转中心、第三螺旋桨3的旋转中心和第四螺旋桨4的旋转中心的连线是一条垂直于水平面的直线,设置偏转螺旋桨直升机重心在这条直线上。
57.偏转螺旋桨直升机的宽度不超过两个螺旋桨的直径,偏转螺旋桨直升机机身窄长。
58.在机身75下、偏转螺旋桨直升机重心附近设置起落架76,这就构成了偏转螺旋桨直升机。
59.以下说明偏转螺旋桨直升机的工作原理。
60.设第一螺旋桨1逆时针转,第二螺旋桨2顺时针转,第三螺旋桨3逆时针转,第四螺旋桨4顺时针转。
61.第一螺旋桨1、第二螺旋桨2、第三螺旋桨3和第四螺旋桨4是尺寸相同的定距螺旋
桨,第一电机11、第二电机21、第三电机31和第四电机41大小相同。
62.操纵第一竖直拉杆15和第二竖直拉杆25,使第一横向摇臂16和第一纵向摇臂26处于水平,第一螺旋桨1的旋转面和第二螺旋桨2的旋转面处于水平、第三螺旋桨3的旋转面和第四螺旋桨4的旋转面处于水平,启动第一电机11、第二电机21、第三电机31和第四电机41,使第一螺旋桨1、第二螺旋桨2、第三螺旋桨3和第四螺旋桨4同时以相同的转速转动, 第一螺旋桨1、第二螺旋桨2的反扭矩相互抵消,第三螺旋桨3、第四螺旋桨4的反扭矩相互抵消,偏转螺旋桨直升机保持航向的稳定。
63.继续相同的增大第一螺旋桨1、第二螺旋桨2、第三螺旋桨3和第四螺旋桨4的转速,第一螺旋桨1、第二螺旋桨2、第三螺旋桨3和第四螺旋桨4的升力增大,当总升力大于偏转螺旋桨直升机的重量时偏转螺旋桨直升机垂直上升。
64.相同的减少第一螺旋桨1、第二螺旋桨2、第三螺旋桨3和第四螺旋桨4的转速,第一螺旋桨1、第二螺旋桨2、第三螺旋桨3和第四螺旋桨4的升力减少,当总升力等于偏转螺旋桨直升机的重量时偏转螺旋桨直升机悬停。
65.继续相同的减少第一螺旋桨1、第二螺旋桨2、第三螺旋桨3和第四螺旋桨4的转速,第一螺旋桨1、第二螺旋桨2、第三螺旋桨3和第四螺旋桨4的升力减少,当总升力小于偏转螺旋桨直升机的重量时偏转螺旋桨直升机垂直下降。
66.当偏转螺旋桨直升机在空中,操纵第一竖直拉杆15向下拉动第一横向摇臂16,第一横向摇臂16向右下方向倾斜,带动第一纵向转动轴91向右转动,使第一螺旋桨1和第二螺旋桨2的旋转面向右倾斜,第一螺旋桨1和第二螺旋桨2的升力向右倾斜,偏转螺旋桨直升机向右横滚;操纵第一竖直拉杆15向上推动第一横向摇臂16,第一横向摇臂16向左上方向倾斜,带动第一纵向转动轴91向左转动,使第一螺旋桨1和第二螺旋桨2的旋转面向左倾斜,第一螺旋桨1和第二螺旋桨2的升力向左倾斜,偏转螺旋桨直升机向左横滚,实现操纵横滚。
67.当偏转螺旋桨直升机在空中,操纵第二竖直拉杆25向下拉动第一纵向摇臂26,第一纵向摇臂26向后下方向倾斜,带动第一横向转动轴92向后转动,使第三螺旋桨3和第四螺旋桨4的旋转面向后倾斜,第三螺旋桨3和第四螺旋桨4的升力向后倾斜,偏转螺旋桨直升机后仰;操纵第二竖直拉杆25向上推动第一纵向摇臂26,第一纵向摇臂26向上前方向倾斜,带动第一横向转动轴92向前转动,使第三螺旋桨3和第四螺旋桨4的旋转面向前倾斜,第三螺旋桨3和第四螺旋桨4的升力向前倾斜,偏转螺旋桨直升机前府,实现俯仰操纵。
68.当偏转螺旋桨直升机在空中,增大第一螺旋桨1和第三螺旋桨3的转速,第一螺旋桨1和第三螺旋桨3的升力增大,逆时针转的第一螺旋桨1和第三螺旋桨3的反扭矩增大,同时,减少第二螺旋桨2和第四螺旋桨4的转速,第二螺旋桨2和第四螺旋桨4的升力减少,顺时针转的第二螺旋桨2和第四螺旋桨4反扭矩减少,逆时针转的第一螺旋桨1和第三螺旋桨3的反扭矩使偏转螺旋桨直升机顺时针转,即向右转向;减少第一螺旋桨1和第三螺旋桨3的转速,第一螺旋桨1和第三螺旋桨3的升力减少,逆时针转的第一螺旋桨1和第三螺旋桨3的反扭矩减少,同时,增大第二螺旋桨2和第四螺旋桨4的转速,第二螺旋桨2和第四螺旋桨4的升力增大,顺时针转的第二螺旋桨2和第四螺旋桨4反扭矩增大,顺时针转的第二螺旋桨2和第四螺旋桨4反扭矩使偏转螺旋桨直升机逆时针转,即向左转向,实现航向操纵。
69.当偏转螺旋桨直升机在空中,操纵偏转螺旋桨直升机前府,并同时增大第一螺旋桨1、第二螺旋桨2、第三螺旋桨3和第四螺旋桨4的转速,偏转螺旋桨直升机向前飞行。
70.操纵偏转螺旋桨直升机前府和向左转向,并同时增大第一螺旋桨1、第二螺旋桨2、第三螺旋桨3和第四螺旋桨4的转速,偏转螺旋桨直升机向左前方飞行。
71.操纵偏转螺旋桨直升机前府和向右转向,并同时增大第一螺旋桨1、第二螺旋桨2、第三螺旋桨3和第四螺旋桨4的转速,偏转螺旋桨直升机向右前方飞行。
72.操纵偏转螺旋桨直升机后仰,并同时增大第一螺旋桨1、第二螺旋桨2、第三螺旋桨3和第四螺旋桨4的转速,偏转螺旋桨直升机向后飞行。
73.操纵偏转螺旋桨直升机向左横滚,并同时增大第一螺旋桨1、第二螺旋桨2、第三螺旋桨3和第四螺旋桨4的转速,偏转螺旋桨直升机向左侧飞行。
74.操纵偏转螺旋桨直升机向右横滚,并同时增大第一螺旋桨1、第二螺旋桨2、第三螺旋桨3和第四螺旋桨4的转速,偏转螺旋桨直升机向右侧飞行。
75.第一螺旋桨1和第二螺旋桨2共同操纵偏转螺旋桨直升机的横滚。
76.第三螺旋桨3和第四螺旋桨4共同操纵偏转螺旋桨直升机的俯仰。
77.第一螺旋桨1、第二螺旋桨2、第三螺旋桨3和第四螺旋桨4共同操纵偏转螺旋桨直升机的航向。
78.当第一螺旋桨1出现故障,第二螺旋桨2操纵偏转螺旋桨直升机的横滚,还能保持横向稳定,纵向稳定不受影响,航向稳定受到影响,依靠横向和纵向稳定垂直紧急迫降。
79.当第二螺旋桨2出现故障,第一螺旋桨1操纵偏转螺旋桨直升机的横滚,还能保持横向稳定,纵向稳定不受影响,航向稳定受到影响,依靠横向和纵向稳定垂直紧急迫降。
80.当第三螺旋桨3出现故障,第四螺旋桨4操纵偏转螺旋桨直升机的俯仰,还能保持纵向稳定,横向稳定不受影响,航向稳定受到影响,依靠横向和纵向稳定垂直紧急迫降。
81.当第四螺旋桨4出现故障,第三螺旋桨3操纵偏转螺旋桨直升机的俯仰,还能保持纵向稳定,横向稳定不受影响,航向稳定受到影响,依靠横向和纵向稳定垂直紧急迫降。
82.任意一个螺旋桨出现故障,依靠另外三个螺旋桨紧急迫降,提高了飞行的安全性。
83.图2所示是本发明第二个实施例偏转螺旋桨直升机轴测图, 在机身75顶部、偏转螺旋桨直升机重心前纵向设置一条前竖直柱95,在前竖直柱95的顶部纵向设置轴承9;在机身75顶部、偏转螺旋桨直升机重心后纵向设置一条后竖直柱96,在后竖直柱96的顶部纵向设置轴承9。
84.设置第一纵向转动轴91水平安装在前竖直柱95的顶部纵向轴承9和后竖直柱96的顶部纵向轴承9内,第一纵向转动轴91在两个轴承9内可以绕纵向转动,在第一纵向转动轴91的后端设置第一横向摇臂16,在第一横向摇臂16上铰接第一竖直拉杆15,在第一纵向转动轴91的中部上面设置第一电机安装座12,在第一电机安装座12上安装第一电机11,在第一电机11上安装第一螺旋桨1,第一纵向转动轴91的中部第一电机安装座12的下面设置第二电机安装座22,在第二电机安装座22上安装第二电机21,在第二电机21上安装第二螺旋桨2,第一螺旋桨1是拉力螺旋桨,第二螺旋桨2是推力螺旋桨,设置第一螺旋桨1的旋转面和第二螺旋桨2的旋转面平行,当第一螺旋桨1的旋转面和第二螺旋桨2的旋转面水平时,第一横向摇臂16水平向右。
85.在机身75顶部、偏转螺旋桨直升机重心横向左边设置一条左竖直柱97,在左竖直柱97的顶部纵向设置轴承9;在机身75顶部、偏转螺旋桨直升机重心横向右边设置一条右竖直柱98,在右竖直柱98的顶部纵向设置轴承9。
86.设置第一横向转动轴92水平安装在左竖直柱97的顶部纵向轴承9和右竖直柱98的顶部纵向轴承9内,第一横向转动轴92在两个轴承9内可以绕横向转动,在第一横向转动轴92的右端设置第一纵向摇臂26,在第一纵向摇臂26上铰接第二竖直拉杆25,在第一横向转动轴92的中部上面设置第三电机安装座32,在第三电机安装座32上安装第三电机31,在第三电机31上安装第三螺旋桨3,第一横向转动轴92的中部、第三电机安装座32的下面设置第四电机安装座42,在第四电机安装座42上安装第四电机41,在第四电机41上安装第四螺旋桨4,第三螺旋桨3是拉力螺旋桨,第四螺旋桨4是推力螺旋桨,设置第三螺旋桨3的旋转面和第四螺旋桨4的旋转面平行,当第三螺旋桨3的旋转面和第四螺旋桨4的旋转面水平时,第一纵向摇臂26水平向后。
87.在第一纵向转动轴91的下面、前竖直柱95和后竖直柱96上水平设置第一纵向固定轴93,第一纵向固定轴93的前端固接在前竖直柱95上,第一纵向固定轴93的后端固接在后竖直柱96上,第一纵向固定轴93不能转动,在第一纵向固定轴93的中部上面设置第五电机安装座52,在第五电机安装座52上安装第五电机51,在第五电机51上安装第五螺旋桨5,在第一纵向固定轴93的中部下面、第五电机安装座52下面安装第六电机安装座62,在第六电机安装座62上安装第六电机61,在第六电机61上安装第六螺旋桨6。
88.第五螺旋桨5的旋转面和第六螺旋桨6的旋转面水平设置。
89.前竖直柱95的高度和后竖直柱96的高度相同,左竖直柱97的高度和右竖直柱98的高度相同,前竖直柱95、后竖直柱96的高度比左竖直柱97、右竖直柱98的高度高。
90.第一纵向转动轴91的高度比第一横向转动轴92的高度高,第一横向转动轴92的高度比第一纵向固定轴93的高度高。
91.第一横向摇臂16的高度比第一纵向摇臂26的高度高。
92.第一螺旋桨1的旋转面高度比第二螺旋桨2的旋转面高度高,第二螺旋桨2的旋转面高度高比第三螺旋桨3的旋转面高度高,第三螺旋桨3的旋转面高度比第四螺旋桨4的旋转面高度高,第四螺旋桨4的旋转面高度比第五螺旋桨5的旋转面高度高,第五螺旋桨5的旋转面高度比第六螺旋桨6的旋转面高度高。
93.操纵第一竖直拉杆16和第二竖直拉杆25,使第一横向摇臂16和第一纵向摇臂26处于水平,第一螺旋桨1的旋转面和第二螺旋桨2的旋转面处于水平、第三螺旋桨3的旋转面和第四螺旋桨4的旋转面处于水平,这时,第一螺旋桨1的旋转中心和第二螺旋桨2的旋转中心、第三螺旋桨3的旋转中心、第四螺旋桨4的旋转中心、第五螺旋桨5的旋转中心和第六螺旋桨6的旋转中心的连线是一条垂直于水平面的直线,设置偏转螺旋桨直升机重心在这条直线上。
94.偏转螺旋桨直升机的宽度不超过两个螺旋桨的直径,偏转螺旋桨直升机机身窄长。
95.在机身75下、偏转螺旋桨直升机重心附近设置起落架76,这就构成了偏转螺旋桨直升机。
96.以下说明偏转螺旋桨直升机的工作原理。
97.设第一螺旋桨1逆时针转,第二螺旋桨2顺时针转,第三螺旋桨3逆时针转,第四螺旋桨4顺时针转、第五螺旋桨5逆时针转,第六螺旋桨6顺时针转。
98.第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5和第六螺旋
桨6是尺寸相同的定距螺旋桨,第一电机11、第二电机21、第三电机31、第四电机41、第五电机51和第六电机61大小相同。
99.操纵第一竖直拉杆15和第二竖直拉杆25,使第一横向摇臂16和第一纵向摇臂26处于水平,第一螺旋桨1的旋转面和第二螺旋桨2的旋转面处于水平、第三螺旋桨3的旋转面和第四螺旋桨4的旋转面处于水平,启动第一电机11、第二电机21、第三电机31、第四电机41、第五电机51和第六电机61,使第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5和第六螺旋桨6同时以相同的转速转动, 第一螺旋桨1、第二螺旋桨2的反扭矩相互抵消,第三螺旋桨3、第四螺旋桨4的反扭矩相互抵消,第五螺旋桨5、第六螺旋桨6的反扭矩相互抵消,偏转螺旋桨直升机保持航向的稳定。
100.继续相同的增大第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5和第六螺旋桨6的转速,第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5和第六螺旋桨6的升力增大,当总升力大于偏转螺旋桨直升机的重量时偏转螺旋桨直升机垂直上升。
101.相同的减少第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5和第六螺旋桨6的转速,第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5和第六螺旋桨6的升力减少,当总升力等于偏转螺旋桨直升机的重量时偏转螺旋桨直升机悬停。
102.继续相同的减少第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5和第六螺旋桨6的转速,第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5和第六螺旋桨6的升力减少,当总升力小于偏转螺旋桨直升机的重量时偏转螺旋桨直升机垂直下降。
103.当偏转螺旋桨直升机在空中,操纵第一竖直拉杆15向下拉动第一横向摇臂16,第一横向摇臂16向右下方向倾斜,带动第一纵向转动轴91向右转动,使第一螺旋桨1和第二螺旋桨2的旋转面向右倾斜,第一螺旋桨1和第二螺旋桨2的升力向右倾斜,偏转螺旋桨直升机向右横滚;操纵第一竖直拉杆15向上推动第一横向摇臂16,第一横向摇臂16向左上方向倾斜,带动第一纵向转动轴91向左转动,使第一螺旋桨1和第二螺旋桨2的旋转面向左倾斜,第一螺旋桨1和第二螺旋桨2的升力向左倾斜,偏转螺旋桨直升机向左横滚,实现操纵横滚。
104.当偏转螺旋桨直升机在空中,操纵第二竖直拉杆25向下拉动第一纵向摇臂26,第一纵向摇臂26向后下方向倾斜,带动第一横向转动轴92向后转动,使第三螺旋桨3和第四螺旋桨4的旋转面向后倾斜,第三螺旋桨3和第四螺旋桨4的升力向后倾斜,偏转螺旋桨直升机后仰;操纵第二竖直拉杆25向上推动第一纵向摇臂26,第一纵向摇臂26向上前方向倾斜,带动第一横向转动轴92向前转动,使第三螺旋桨3和第四螺旋桨4的旋转面向前倾斜,第三螺旋桨3和第四螺旋桨4的升力向前倾斜,偏转螺旋桨直升机前府,实现俯仰操纵。
105.当偏转螺旋桨直升机在空中,增大第一螺旋桨1、第三螺旋桨3和第五螺旋桨5的转速,第一螺旋桨1、第三螺旋桨3和第五螺旋桨5的升力增大,逆时针转的第一螺旋桨1、第三螺旋桨3和第五螺旋桨5的反扭矩增大,同时,减少第二螺旋桨2、第四螺旋桨4和第六螺旋桨6的转速,第二螺旋桨2、第四螺旋桨4和第六螺旋桨6的升力减少,顺时针转的第二螺旋桨2、第四螺旋桨4和第六螺旋桨6反扭矩减少,逆时针转的第一螺旋桨1、第三螺旋桨3和第五螺旋桨5的反扭矩使偏转螺旋桨直升机顺时针转,即向右转向;减少第一螺旋桨1、第三螺旋桨
3和第五螺旋桨5的转速,第一螺旋桨1、第三螺旋桨3和第五螺旋桨5的升力减少,逆时针转的第一螺旋桨1、第三螺旋桨3和第五螺旋桨5的反扭矩减少,同时,增大第二螺旋桨2、第四螺旋桨4和第六螺旋桨6的转速,第二螺旋桨2、第四螺旋桨4和第六螺旋桨6的升力增大,顺时针转的第二螺旋桨2、第四螺旋桨4和第六螺旋桨6反扭矩增大,顺时针转的第二螺旋桨2、第四螺旋桨4和第六螺旋桨6反扭矩使偏转螺旋桨直升机逆时针转,即向左转向,实现航向操纵。
106.当偏转螺旋桨直升机在空中,操纵偏转螺旋桨直升机前府,并同时增大第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5和第六螺旋桨6的转速,偏转螺旋桨直升机向前飞行。
107.操纵偏转螺旋桨直升机前府和向左转向,并同时增大第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5和第六螺旋桨6的转速,偏转螺旋桨直升机向左前方飞行。
108.操纵偏转螺旋桨直升机前府和向右转向,并同时增大第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5和第六螺旋桨6的转速,偏转螺旋桨直升机向右前方飞行。
109.操纵偏转螺旋桨直升机后仰,并同时增大第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5和第六螺旋桨6的转速,偏转螺旋桨直升机向后飞行。
110.操纵偏转螺旋桨直升机向左横滚,并同时增大第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5和第六螺旋桨6的转速,偏转螺旋桨直升机向左侧飞行。
111.操纵偏转螺旋桨直升机向右横滚,并同时增大第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5和第六螺旋桨6的转速,偏转螺旋桨直升机向右侧飞行。
112.第一螺旋桨1和第二螺旋桨2共同操纵偏转螺旋桨直升机的横滚。
113.第三螺旋桨3和第四螺旋桨4共同操纵偏转螺旋桨直升机的俯仰。
114.第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5和第六螺旋桨6共同操纵偏转螺旋桨直升机的航向。
115.当第一螺旋桨1出现故障,第二螺旋桨2操纵偏转螺旋桨直升机的横滚,还能保持横向稳定,纵向稳定不受影响,航向稳定受到影响,通过关闭第六电机61,使第六螺旋桨6不转动,保持航向稳定,在横向、纵向和航向保持稳定的情况下,安全紧急迫降。
116.当第二螺旋桨2出现故障,第一螺旋桨1操纵偏转螺旋桨直升机的横滚,还能保持横向稳定,纵向稳定不受影响,航向稳定受到影响,通过关闭第五电机51,使第五螺旋桨5不转动,保持航向稳定,在横向、纵向和航向保持稳定的情况下,安全紧急迫降。
117.当第三螺旋桨3出现故障,第四螺旋桨4操纵偏转螺旋桨直升机的俯仰,还能保持纵向稳定,横向稳定不受影响,航向稳定受到影响,通过关闭第六电机61,使第六螺旋桨6不转动,保持航向稳定,在横向、纵向和航向保持稳定的情况下,安全紧急迫降。
118.当第四螺旋桨4出现故障,第三螺旋桨3操纵偏转螺旋桨直升机的俯仰,还能保持纵向稳定,横向稳定不受影响,航向稳定受到影响,通过关闭第五电机51,使第五螺旋桨5不转动,保持航向稳定,在横向、纵向和航向保持稳定的情况下,安全紧急迫降。
119.当第五螺旋桨5出现故障,纵向和横向稳定不受影响,航向稳定受到影响,通过关闭第六电机61,使第六螺旋桨6不转动,保持航向稳定,在横向、纵向和航向
保持稳定的情况下,安全紧急迫降。
120.当第六螺旋桨6出现故障,纵向和横向稳定不受影响,航向稳定受到影响,通过关闭第五电机51,使第五螺旋桨5不转动,保持航向稳定,在横向、纵向和航向保持稳定的情况下,安全紧急迫降。
121.任意一个螺旋桨出现故障,依靠另外五个螺旋桨紧急迫降,提高了飞行的安全性。
122.图3所示是本发明第三个实施例偏转螺旋桨直升机轴测图, 在机身75顶部、偏转螺旋桨直升机重心前纵向设置一条前竖直柱95,在前竖直柱95的顶部纵向设置轴承9;在机身75顶部、偏转螺旋桨直升机重心后纵向设置一条后竖直柱96,在后竖直柱96的顶部纵向设置轴承9。
123.设置第一纵向转动轴91水平安装在前竖直柱95的顶部纵向轴承9和后竖直柱96的顶部纵向轴承9内,第一纵向转动轴91在两个轴承9内可以绕纵向转动,在第一纵向转动轴91的后端设置第一横向摇臂16,在第一横向摇臂16上铰接第一竖直拉杆15,在第一纵向转动轴91的中部上面设置第一电机安装座12,在第一电机安装座12上安装第一电机11,在第一电机11上安装第一螺旋桨1,第一纵向转动轴91的中部第一电机安装座12的下面设置第二电机安装座22,在第二电机安装座22上安装第二电机21,在第二电机21上安装第二螺旋桨2,第一螺旋桨1是拉力螺旋桨,第二螺旋桨2是推力螺旋桨,设置第一螺旋桨1的旋转面和第二螺旋桨2的旋转面平行,当第一螺旋桨1的旋转面和第二螺旋桨2的旋转面水平时,第一横向摇臂16水平向右。
124.在机身75顶部、偏转螺旋桨直升机重心横向左边设置一条左竖直柱97,在左竖直柱97的顶部纵向设置轴承9;在机身75顶部、偏转螺旋桨直升机重心横向右边设置一条右竖直柱98,在右竖直柱98的顶部纵向设置轴承9。
125.设置第一横向转动轴92水平安装在左竖直柱97的顶部纵向轴承9和右竖直柱98的顶部纵向轴承9内,第一横向转动轴92在两个轴承9内可以绕横向转动,在第一横向转动轴92的右端设置第一纵向摇臂26,在第一纵向摇臂26上铰接第二竖直拉杆25,在第一横向转动轴92的中部上面设置第三电机安装座32,在第三电机安装座32上安装第三电机31,在第三电机31上安装第三螺旋桨3,第一横向转动轴92的中部、第三电机安装座32的下面设置第四电机安装座42,在第四电机安装座42上安装第四电机41,在第四电机41上安装第四螺旋桨4,第三螺旋桨3是拉力螺旋桨,第四螺旋桨4是推力螺旋桨,设置第三螺旋桨3的旋转面和第四螺旋桨4的旋转面平行,当第三螺旋桨3的旋转面和第四螺旋桨4的旋转面水平时,第一纵向摇臂26水平向后。
126.在第一纵向转动轴91的下面、前竖直柱95和后竖直柱96上水平设置第一纵向固定轴93,第一纵向固定轴93的前端固接在前竖直柱95上,第一纵向固定轴93的后端固接在后竖直柱96上,第一纵向固定轴93不能转动,在第一纵向固定轴93的中部上面设置第五电机安装座52,在第五电机安装座52上安装第五电机51,在第五电机51上安装第五螺旋桨5,在第一纵向固定轴93的中部下面、第五电机安装座52下面安装第六电机安装座62,在第六电机安装座62上安装第六电机61,在第六电机61上安装第六螺旋桨6。
127.第五螺旋桨5的旋转面和第六螺旋桨6的旋转面水平设置。
128.在第一纵向固定轴93的下面、前竖直柱95和后竖直柱96上水平设置第二纵向固定轴94,第二纵向固定轴94的前端固接在前竖直柱95上,第二纵向固定轴94的后端固接在后
竖直柱96上,第二纵向固定轴94不能转动,在第二纵向固定轴94的中部上面设置第七电机安装座72,在第七电机安装座72上安装第七电机71,在第七电机71上安装第七螺旋桨7,在第二纵向固定轴94的中部下面、第七电机安装座72下面安装第八电机安装座82,在第八电机安装座82上安装第八电机81,在第八电机81上安装第八螺旋桨8。
129.第七螺旋桨7的旋转面和第八螺旋桨8的旋转面水平设置。
130.前竖直柱95的高度和后竖直柱96的高度相同,左竖直柱97的高度和右竖直柱98的高度相同,前竖直柱95、后竖直柱96的高度比左竖直柱97、右竖直柱98的高度高。
131.第一纵向转动轴91的高度比第一横向转动轴92的高度高,第一横向转动轴92的高度比第一纵向固定轴93的高度高,第一纵向固定轴93的高度比第二纵向固定轴94的高度高。
132.第一横向摇臂16的高度比第一纵向摇臂26的高度高。
133.第一螺旋桨1的旋转面高度比第二螺旋桨2的旋转面高度高,第二螺旋桨2的旋转面高度高比第三螺旋桨3的旋转面高度高,第三螺旋桨3的旋转面高度比第四螺旋桨4的旋转面高度高,第四螺旋桨4的旋转面高度比第五螺旋桨5的旋转面高度高,第五螺旋桨5的旋转面高度比第六螺旋桨6的旋转面高度高,第六螺旋桨6的旋转面高度比第七螺旋桨7的旋转面高度高,第七螺旋桨7的旋转面高度比第八螺旋桨8的旋转面高度高。
134.操纵第一竖直拉杆16和第二竖直拉杆25,使第一横向摇臂16和第一纵向摇臂26处于水平,第一螺旋桨1的旋转面和第二螺旋桨2的旋转面处于水平、第三螺旋桨3的旋转面和第四螺旋桨4的旋转面处于水平,这时,第一螺旋桨1的旋转中心和第二螺旋桨2的旋转中心、第三螺旋桨3的旋转中心、第四螺旋桨4的旋转中心、第五螺旋桨5的旋转中心、第六螺旋桨6的旋转中心、第七螺旋桨7的旋转中心和第八螺旋桨8的旋转中心的连线是一条垂直于水平面的直线,设置偏转螺旋桨直升机重心在这条直线上。
135.偏转螺旋桨直升机的宽度不超过两个螺旋桨的直径,偏转螺旋桨直升机机身窄长。
136.在机身75下、偏转螺旋桨直升机重心附近设置起落架76,这就构成了偏转螺旋桨直升机。
137.以下说明偏转螺旋桨直升机的工作原理。
138.设第一螺旋桨1逆时针转,第二螺旋桨2顺时针转,第三螺旋桨3逆时针转,第四螺旋桨4顺时针转,第五螺旋桨5逆时针转,第六螺旋桨6顺时针转,第七螺旋桨7逆时针转,第八螺旋桨8顺时针转。
139.第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5、第六螺旋桨6、第七螺旋桨7和第八螺旋桨8是尺寸相同的定距螺旋桨,第一电机11、第二电机21、第三电机31、第四电机41、第五电机51、第六电机61、第七电机71和第八电机81大小相同。
140.操纵第一竖直拉杆15和第二竖直拉杆25,使第一横向摇臂16和第一纵向摇臂26处于水平,第一螺旋桨1的旋转面和第二螺旋桨2的旋转面处于水平、第三螺旋桨3的旋转面和第四螺旋桨4的旋转面处于水平,启动第一电机11、第二电机21、第三电机31、第四电机41、第五电机51、第六电机61、第七电机71和第八电机81使第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5、第六螺旋桨6、第七螺旋桨7和第八螺旋桨8同时以相同的转速转动, 第一螺旋桨1、第二螺旋桨2的反扭矩相互抵消,第三螺旋桨3、第四螺旋桨4的
反扭矩相互抵消,第五螺旋桨5、第六螺旋桨6的反扭矩相互抵消,第七螺旋桨7、第八螺旋桨8的反扭矩相互抵消,偏转螺旋桨直升机保持航向的稳定。
141.继续相同的增大第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5、第六螺旋桨6、第七螺旋桨7和第八螺旋桨8的转速,第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5、第六螺旋桨6、第七螺旋桨7和第八螺旋桨8的升力增大,当总升力大于偏转螺旋桨直升机的重量时偏转螺旋桨直升机垂直上升。
142.相同的减少第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5、第六螺旋桨6、第七螺旋桨7和第八螺旋桨8的转速,第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5、第六螺旋桨6、第七螺旋桨7和第八螺旋桨8的升力减少,当总升力等于偏转螺旋桨直升机的重量时偏转螺旋桨直升机悬停。
143.继续相同的减少第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5、第六螺旋桨6、第七螺旋桨7和第八螺旋桨8的转速,第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5、第六螺旋桨6、第七螺旋桨7和第八螺旋桨8的升力减少,当总升力小于偏转螺旋桨直升机的重量时偏转螺旋桨直升机垂直下降。
144.当偏转螺旋桨直升机在空中,操纵第一竖直拉杆15向下拉动第一横向摇臂16,第一横向摇臂16向右下方向倾斜,带动第一纵向转动轴91向右转动,使第一螺旋桨1和第二螺旋桨2的旋转面向右倾斜,第一螺旋桨1和第二螺旋桨2的升力向右倾斜,偏转螺旋桨直升机向右横滚;操纵第一竖直拉杆15向上推动第一横向摇臂16,第一横向摇臂16向左上方向倾斜,带动第一纵向转动轴91向左转动,使第一螺旋桨1和第二螺旋桨2的旋转面向左倾斜,第一螺旋桨1和第二螺旋桨2的升力向左倾斜,偏转螺旋桨直升机向左横滚,实现操纵横滚。
145.当偏转螺旋桨直升机在空中,操纵第二竖直拉杆25向下拉动第一纵向摇臂26,第一纵向摇臂26向后下方向倾斜,带动第一横向转动轴92向后转动,使第三螺旋桨3和第四螺旋桨4的旋转面向后倾斜,第三螺旋桨3和第四螺旋桨4的升力向后倾斜,偏转螺旋桨直升机后仰;操纵第二竖直拉杆25向上推动第一纵向摇臂26,第一纵向摇臂26向上前方向倾斜,带动第一横向转动轴92向前转动,使第三螺旋桨3和第四螺旋桨4的旋转面向前倾斜,第三螺旋桨3和第四螺旋桨4的升力向前倾斜,偏转螺旋桨直升机前府,实现俯仰操纵。
146.当偏转螺旋桨直升机在空中,增大第一螺旋桨1、第三螺旋桨3、第五螺旋桨5和第七螺旋桨7的转速,第一螺旋桨1、第三螺旋桨3、第五螺旋桨5和第七螺旋桨7的升力增大,逆时针转的第一螺旋桨1、第三螺旋桨3、第五螺旋桨5和第七螺旋桨7的反扭矩增大,同时,减少第二螺旋桨2、第四螺旋桨4、第六螺旋桨6和第八螺旋桨8的转速,第二螺旋桨2、第四螺旋桨4、第六螺旋桨6和第八螺旋桨8的升力减少,顺时针转的第二螺旋桨2、第四螺旋桨4、第六螺旋桨6和第八螺旋桨8反扭矩减少,逆时针转的第一螺旋桨1、第三螺旋桨3、第五螺旋桨5和第七螺旋桨7的反扭矩使偏转螺旋桨直升机顺时针转,即向右转向;减少第一螺旋桨1、第三螺旋桨3、第五螺旋桨5和第七螺旋桨7的转速,第一螺旋桨1、第三螺旋桨3、第五螺旋桨5和第七螺旋桨7的升力减少,逆时针转的第一螺旋桨1、第三螺旋桨3、第五螺旋桨5和第七螺旋桨7的反扭矩减少,同时,增大第二螺旋桨2、第四螺旋桨4、第六螺旋桨6和第八螺旋桨8的转速,第二螺旋桨2、第四螺旋桨4、第六螺旋桨6和第八螺旋桨8的升力增大,顺时针转的第二螺旋桨2、第四螺旋桨4、第六螺旋桨6和第八螺旋桨8反扭矩增大,顺时针转的第二螺旋桨2、第四螺旋桨4、第六螺旋桨6和第八螺旋桨8的反扭矩使偏转螺旋桨直升机逆时针转,即向
左转向,实现航向操纵。
147.当偏转螺旋桨直升机在空中,操纵偏转螺旋桨直升机前府,并同时增大第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5和第六螺旋桨6的转速,偏转螺旋桨直升机向前飞行。
148.操纵偏转螺旋桨直升机前府和向左转向,并同时增大第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5、第六螺旋桨6、第七螺旋桨7和第八螺旋桨8的转速,偏转螺旋桨直升机向左前方飞行。
149.操纵偏转螺旋桨直升机前府和向右转向,并同时增大第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5、第六螺旋桨6、第七螺旋桨7和第八螺旋桨8的转速,偏转螺旋桨直升机向右前方飞行。
150.操纵偏转螺旋桨直升机后仰,并同时增大第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5、第六螺旋桨6、第七螺旋桨7和第八螺旋桨8的转速,偏转螺旋桨直升机向后飞行。
151.操纵偏转螺旋桨直升机向左横滚,并同时增大第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5、第六螺旋桨6、第七螺旋桨7和第八螺旋桨8的转速,偏转螺旋桨直升机向左侧飞行。
152.操纵偏转螺旋桨直升机向右横滚,并同时增大第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5、第六螺旋桨6、第七螺旋桨7和第八螺旋桨8的转速,偏转螺旋桨直升机向右侧飞行。
153.第一螺旋桨1和第二螺旋桨2共同操纵偏转螺旋桨直升机的横滚。
154.第三螺旋桨3和第四螺旋桨4共同操纵偏转螺旋桨直升机的俯仰。
155.第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5、第六螺旋桨6、第七螺旋桨7和第八螺旋桨8共同操纵偏转螺旋桨直升机的航向。
156.当第一螺旋桨1出现故障,第二螺旋桨2操纵偏转螺旋桨直升机的横滚,还能保持横向稳定,纵向稳定不受影响,航向稳定受到影响,通过关闭第六电机61,使第六螺旋桨6不转动,保持航向稳定,在横向、纵向和航向保持稳定的情况下,安全紧急迫降。
157.当第二螺旋桨2出现故障,第一螺旋桨1操纵偏转螺旋桨直升机的横滚,还能保持横向稳定,纵向稳定不受影响,航向稳定受到影响,通过关闭第五电机51,使第五螺旋桨5不转动,保持航向稳定,在横向、纵向和航向保持稳定的情况下,安全紧急迫降。
158.当第三螺旋桨3出现故障,第四螺旋桨4操纵偏转螺旋桨直升机的俯仰,还能保持纵向稳定,横向稳定不受影响,航向稳定受到影响,通过关闭第六电机61,使第六螺旋桨6不转动,保持航向稳定,在横向、纵向和航向保持稳定的情况下,安全紧急迫降。
159.当第四螺旋桨4出现故障,第三螺旋桨3操纵偏转螺旋桨直升机的俯仰,还能保持纵向稳定,横向稳定不受影响,航向稳定受到影响,通过关闭第五电机51,使第五螺旋桨5不转动,保持航向稳定,在横向、纵向和航向保持稳定的情况下,安全紧急迫降。
160.当第五螺旋桨5出现故障,纵向和横向稳定不受影响,航向稳定受到影响,通过关闭第六电机61,使第六螺旋桨6不转动,保持航向稳定,在横向、纵向和航向保持稳定的情况下,安全紧急迫降。
161.当第六螺旋桨6出现故障,纵向和横向稳定不受影响,航向稳定受到影响,通过关
闭第五电机51,使第五螺旋桨5不转动,保持航向稳定,在横向、纵向和航向保持稳定的情况下,安全紧急迫降。
162.当第七螺旋桨7出现故障,纵向和横向稳定不受影响,航向稳定受到影响,通过关闭第八电机81,使第八螺旋桨8不转动,保持航向稳定,在横向、纵向和航向保持稳定的情况下,安全紧急迫降。
163.当第八螺旋桨8出现故障,纵向和横向稳定不受影响,航向稳定受到影响,通过关闭第七电机71,使第七螺旋桨7不转动,保持航向稳定,在横向、纵向和航向保持稳定的情况下,安全紧急迫降。
164.任意一个螺旋桨出现故障,依靠另外7个螺旋桨紧急迫降,提高了飞行的安全性。
165.图4所示是本发明第四个实施例偏转螺旋桨直升机轴测图, 在机身75顶部、偏转螺旋桨直升机重心前纵向设置一条前竖直柱95,在前竖直柱95的顶部纵向设置轴承9;在机身75顶部、偏转螺旋桨直升机重心后纵向设置一条后竖直柱96,在后竖直柱96的顶部纵向设置轴承9。
166.设置第一纵向转动轴91水平安装在前竖直柱95的顶部纵向轴承9和后竖直柱96的顶部纵向轴承9内,第一纵向转动轴91在两个轴承9内可以绕纵向转动,在第一纵向转动轴91的后端设置第一横向摇臂16,在第一横向摇臂16上铰接第一竖直拉杆15,在第一纵向转动轴91的中部上面设置第一电机安装座12,在第一电机安装座12上安装第一电机11,在第一电机11上安装第一螺旋桨1,第一纵向转动轴91的中部第一电机安装座12的下面设置第二电机安装座22,在第二电机安装座22上安装第二电机21,在第二电机21上安装第二螺旋桨2,第一螺旋桨1是拉力螺旋桨,第二螺旋桨2是推力螺旋桨,设置第一螺旋桨1的旋转面和第二螺旋桨2的旋转面平行,当第一螺旋桨1的旋转面和第二螺旋桨2的旋转面水平时,第一横向摇臂16水平向右。
167.在机身75顶部、偏转螺旋桨直升机重心横向左边设置一条左竖直柱97,在左竖直柱97的顶部纵向设置轴承9;在机身75顶部、偏转螺旋桨直升机重心横向右边设置一条右竖直柱98,在右竖直柱98的顶部纵向设置轴承9。
168.设置第一横向转动轴92水平安装在左竖直柱97的顶部纵向轴承9和右竖直柱98的顶部纵向轴承9内,第一横向转动轴92在两个轴承9内可以绕横向转动,在第一横向转动轴92的右端设置第一纵向摇臂26,在第一纵向摇臂26上铰接第二竖直拉杆25,在第一横向转动轴92的中部上面设置第三电机安装座32,在第三电机安装座32上安装第三电机31,在第三电机31上安装第三螺旋桨3,第一横向转动轴92的中部、第三电机安装座32的下面设置第四电机安装座42,在第四电机安装座42上安装第四电机41,在第四电机41上安装第四螺旋桨4,第三螺旋桨3是拉力螺旋桨,第四螺旋桨4是推力螺旋桨,设置第三螺旋桨3的旋转面和第四螺旋桨4的旋转面平行,当第三螺旋桨3的旋转面和第四螺旋桨4的旋转面水平时,第一纵向摇臂26水平向后。
169.在第一横向转动轴92的下面、左竖直柱97上设置轴承9,在第一横向转动轴92的下面、右竖直柱98上设置轴承9,设置第二横向转动轴65水平安装在第一横向转动轴92的下面、左竖直柱97上的轴承9和第一横向转动轴92的下面、右竖直柱98上的轴承9内,第二横向转动轴65在两个轴承9内可以绕横向转动,在第二横向转动轴65的右端设置第二纵向摇臂36,在第二纵向摇臂36上铰接第三竖直拉杆35。
170.在第二横向转动轴65的中部上面设置第五电机安装座52,在第五电机安装座52上安装第五电机51,在第五电机51上安装第五螺旋桨5,在第二横向转动轴65的中部下面、第五电机安装座52下面安装第六电机安装座62,在第六电机安装座62上安装第六电机61,在第六电机61上安装第六螺旋桨6。
171.设置第五螺旋桨5的旋转面和第六螺旋桨6的旋转面平行,当第五螺旋桨5的旋转面和第六螺旋桨6的旋转面水平时,第二纵向摇臂36水平向前。
172.前竖直柱95的高度和后竖直柱96的高度相同,左竖直柱97的高度和右竖直柱98的高度相同,前竖直柱95、后竖直柱96的高度比左竖直柱97、右竖直柱98的高度高。
173.第一纵向转动轴91的高度比第一横向转动轴92的高度高,第一横向转动轴92的高度比第二横向转动轴65的高度高。
174.第一横向摇臂16的高度比第一纵向摇臂26的高度高,第一纵向摇臂26的高度比第二纵向摇臂36的高度高。
175.第一螺旋桨1的旋转面高度比第二螺旋桨2的旋转面高度高,第二螺旋桨2的旋转面高度高比第三螺旋桨3的旋转面高度高,第三螺旋桨3的旋转面高度比第四螺旋桨4的旋转面高度高,第四螺旋桨4的旋转面高度比第五螺旋桨5的旋转面高度高,第五螺旋桨5的旋转面高度比第六螺旋桨6的旋转面高度高。
176.操纵第一竖直拉杆16、第二竖直拉杆25和第三竖直拉杆35,使第一横向摇臂16、第一纵向摇臂26和第二纵向摇臂36处于水平,第一螺旋桨1的旋转面和第二螺旋桨2的旋转面处于水平、第三螺旋桨3的旋转面和第四螺旋桨4的旋转面处于水平、第五螺旋桨5的旋转面和第六螺旋桨6的旋转面处于水平,这时,第一螺旋桨1的旋转中心和第二螺旋桨2的旋转中心、第三螺旋桨3的旋转中心、第四螺旋桨4的旋转中心、第五螺旋桨5的旋转中心和第六螺旋桨6的旋转中心的连线是一条垂直于水平面的直线,设置偏转螺旋桨直升机重心在这条直线上。
177.偏转螺旋桨直升机的宽度不超过两个螺旋桨的直径,偏转螺旋桨直升机机身窄长。
178.在机身75下、偏转螺旋桨直升机重心附近设置起落架76,这就构成了偏转螺旋桨直升机。
179.以下说明偏转螺旋桨直升机的工作原理。
180.设第一螺旋桨1逆时针转,第二螺旋桨2顺时针转,第三螺旋桨3逆时针转,第四螺旋桨4顺时针转、第五螺旋桨5逆时针转,第六螺旋桨6顺时针转。
181.第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5和第六螺旋桨6是尺寸相同的定距螺旋桨,第一电机11、第二电机21、第三电机31、第四电机41、第五电机51和第六电机61大小相同。
182.操纵第一竖直拉杆15、第二竖直拉杆25和第三竖直拉杆35,使第一横向摇臂16、第一纵向摇臂26和第二纵向摇臂36处于水平,第一螺旋桨1的旋转面和第二螺旋桨2的旋转面处于水平、第三螺旋桨3的旋转面和第四螺旋桨4的旋转面处于水平,五螺旋桨5的旋转面和第六螺旋桨6的旋转面处于水平,启动第一电机11、第二电机21、第三电机31、第四电机41、第五电机51和第六电机61,使第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5和第六螺旋桨6同时以相同的转速转动, 第一螺旋桨1、第二螺旋桨2的反扭矩相互
抵消,第三螺旋桨3、第四螺旋桨4的反扭矩相互抵消,第五螺旋桨5、第六螺旋桨6的反扭矩相互抵消,偏转螺旋桨直升机保持航向的稳定。
183.继续相同的增大第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5和第六螺旋桨6的转速,第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5和第六螺旋桨6的升力增大,当总升力大于偏转螺旋桨直升机的重量时偏转螺旋桨直升机垂直上升。
184.相同的减少第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5和第六螺旋桨6的转速,第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5和第六螺旋桨6的升力减少,当总升力等于偏转螺旋桨直升机的重量时偏转螺旋桨直升机悬停。
185.继续相同的减少第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5和第六螺旋桨6的转速,第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5和第六螺旋桨6的升力减少,当总升力小于偏转螺旋桨直升机的重量时偏转螺旋桨直升机垂直下降。
186.当偏转螺旋桨直升机在空中,操纵第一竖直拉杆15向下拉动第一横向摇臂16,第一横向摇臂16向右下方向倾斜,带动第一纵向转动轴91向右转动,使第一螺旋桨1和第二螺旋桨2的旋转面向右倾斜,第一螺旋桨1和第二螺旋桨2的升力向右倾斜,偏转螺旋桨直升机向右横滚;操纵第一竖直拉杆15向上推动第一横向摇臂16,第一横向摇臂16向左上方向倾斜,带动第一纵向转动轴91向左转动,使第一螺旋桨1和第二螺旋桨2的旋转面向左倾斜,第一螺旋桨1和第二螺旋桨2的升力向左倾斜,偏转螺旋桨直升机向左横滚,实现操纵横滚。
187.当偏转螺旋桨直升机在空中,操纵第二竖直拉杆25向下拉动第一纵向摇臂26,第一纵向摇臂26向后下方向倾斜,带动第一横向转动轴92向后转动,使第三螺旋桨3和第四螺旋桨4的旋转面向后倾斜,第三螺旋桨3和第四螺旋桨4的升力向后倾斜,偏转螺旋桨直升机后仰;操纵第二竖直拉杆25向上推动第一纵向摇臂26,第一纵向摇臂26向上前方向倾斜,带动第一横向转动轴92向前转动,使第三螺旋桨3和第四螺旋桨4的旋转面向前倾斜,第三螺旋桨3和第四螺旋桨4的升力向前倾斜,偏转螺旋桨直升机前府,实现俯仰操纵。
188.当偏转螺旋桨直升机在空中,增大第一螺旋桨1、第三螺旋桨3和第五螺旋桨5的转速,第一螺旋桨1、第三螺旋桨3和第五螺旋桨5的升力增大,逆时针转的第一螺旋桨1、第三螺旋桨3和第五螺旋桨5的反扭矩增大,同时,减少第二螺旋桨2、第四螺旋桨4和第六螺旋桨6的转速,第二螺旋桨2、第四螺旋桨4和第六螺旋桨6的升力减少,顺时针转的第二螺旋桨2、第四螺旋桨4和第六螺旋桨6反扭矩减少,逆时针转的第一螺旋桨1、第三螺旋桨3和第五螺旋桨5的反扭矩使偏转螺旋桨直升机顺时针转,即向右转向;减少第一螺旋桨1、第三螺旋桨3和第五螺旋桨5的转速,第一螺旋桨1、第三螺旋桨3和第五螺旋桨5的升力减少,逆时针转的第一螺旋桨1、第三螺旋桨3和第五螺旋桨5的反扭矩减少,同时,增大第二螺旋桨2、第四螺旋桨4和第六螺旋桨6的转速,第二螺旋桨2、第四螺旋桨4和第六螺旋桨6的升力增大,顺时针转的第二螺旋桨2、第四螺旋桨4和第六螺旋桨6反扭矩增大,顺时针转的第二螺旋桨2、第四螺旋桨4和第六螺旋桨6反扭矩使偏转螺旋桨直升机逆时针转,即向左转向,实现航向操纵。
189.当偏转螺旋桨直升机在空中,操纵第三竖直拉杆35向下拉动第二纵向摇臂36,第
二纵向摇臂36向前下方向倾斜45
°
,带动第二横向转动轴65向前转动45
°
,使第五螺旋桨5和第六螺旋桨6的旋转面向前倾斜45
°
,并同时增大第五螺旋桨5和第六螺旋桨6的转速。
190.设第五螺旋桨5和第六螺旋桨6的总升力为l,其在水平面方向的分力lx为:lx=l*sin(45
°
)lx=0.707l
ꢀ………………………………………
(1)其在垂直方向的分力ly为:ly=l*sin(45
°
)ly=0.707l
ꢀ………………………………………
(2)lx+ly=0.707l+0.707llx+ly=1.414l
………………………………………
(3)从式(3)可见,将第五螺旋桨5和第六螺旋桨6的旋转面向前倾斜45
°
其在水平面方向的分力lx和垂直方向的分力ly是第五螺旋桨5和第六螺旋桨6的总升力的1.414倍,相当于放大了第五螺旋桨5和第六螺旋桨6的总升力,提高了第五螺旋桨5和第六螺旋桨6的效率。
191.第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4的升力和第五螺旋桨5、第六螺旋桨6在垂直方向的分力ly共同平衡偏转螺旋桨直升机的重量,第五螺旋桨5、第六螺旋桨6在水平方向的分力lx驱动偏转螺旋桨直升机水平向前飞行,无需操纵前府就可以向前水平飞行,提高了乘坐的舒适性。
192.第一螺旋桨1和第二螺旋桨2共同操纵偏转螺旋桨直升机的横滚。
193.第三螺旋桨3和第四螺旋桨4共同操纵偏转螺旋桨直升机的俯仰。
194.第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5和第六螺旋桨6共同操纵偏转螺旋桨直升机的航向。
195.当第一螺旋桨1出现故障,第二螺旋桨2操纵偏转螺旋桨直升机的横滚,还能保持横向稳定,纵向稳定不受影响,航向稳定受到影响,通过关闭第六电机61,使第六螺旋桨6不转动,保持航向稳定,在横向、纵向和航向保持稳定的情况下,安全紧急迫降。
196.当第二螺旋桨2出现故障,第一螺旋桨1操纵偏转螺旋桨直升机的横滚,还能保持横向稳定,纵向稳定不受影响,航向稳定受到影响,通过关闭第五电机51,使第五螺旋桨5不转动,保持航向稳定,在横向、纵向和航向保持稳定的情况下,安全紧急迫降。
197.当第三螺旋桨3出现故障,第四螺旋桨4操纵偏转螺旋桨直升机的俯仰,还能保持纵向稳定,横向稳定不受影响,航向稳定受到影响,通过关闭第六电机61,使第六螺旋桨6不转动,保持航向稳定,在横向、纵向和航向保持稳定的情况下,安全紧急迫降。
198.当第四螺旋桨4出现故障,第三螺旋桨3操纵偏转螺旋桨直升机的俯仰,还能保持纵向稳定,横向稳定不受影响,航向稳定受到影响,通过关闭第五电机51,使第五螺旋桨5不转动,保持航向稳定,在横向、纵向和航向保持稳定的情况下,安全紧急迫降。
199.当第五螺旋桨5出现故障,纵向和横向稳定不受影响,航向稳定受到影响,通过关闭第六电机61,使第六螺旋桨6不转动,保持航向稳定,在横向、纵向和航向保持稳定的情况下,安全紧急迫降。
200.当第六螺旋桨6出现故障,纵向和横向稳定不受影响,航向稳定受到影响,通过关闭第五电机51,使第五螺旋桨5不转动,保持航向稳定,在横向、纵向和航向保持稳定的情况
下,安全紧急迫降。
201.任意一个螺旋桨出现故障,依靠另外五个螺旋桨紧急迫降,提高了飞行的安全性。
202.图5所示是本发明第五个实施例偏转螺旋桨直升机轴测图, 在机身75顶部、偏转螺旋桨直升机重心前纵向设置一条前竖直柱95,在前竖直柱95的顶部纵向设置轴承9;在机身75顶部、偏转螺旋桨直升机重心后纵向设置一条后竖直柱96,在后竖直柱96的顶部纵向设置轴承9。
203.设置第一纵向转动轴91水平安装在前竖直柱95的顶部纵向轴承9和后竖直柱96的顶部纵向轴承9内,第一纵向转动轴91在两个轴承9内可以绕纵向转动,在第一纵向转动轴91的后端设置第一横向摇臂16,在第一横向摇臂16上铰接第一竖直拉杆15,在第一纵向转动轴91的中部上面设置第一电机安装座12,在第一电机安装座12上安装第一电机11,在第一电机11上安装第一螺旋桨1,第一纵向转动轴91的中部第一电机安装座12的下面设置第二电机安装座22,在第二电机安装座22上安装第二电机21,在第二电机21上安装第二螺旋桨2,第一螺旋桨1是拉力螺旋桨,第二螺旋桨2是推力螺旋桨,设置第一螺旋桨1的旋转面和第二螺旋桨2的旋转面平行,当第一螺旋桨1的旋转面和第二螺旋桨2的旋转面水平时,第一横向摇臂16水平向右。
204.在机身75顶部、偏转螺旋桨直升机重心横向左边设置一条左竖直柱97,在左竖直柱97的顶部纵向设置轴承9;在机身75顶部、偏转螺旋桨直升机重心横向右边设置一条右竖直柱98,在右竖直柱98的顶部纵向设置轴承9。
205.设置第一横向转动轴92水平安装在左竖直柱97的顶部纵向轴承9和右竖直柱98的顶部纵向轴承9内,第一横向转动轴92在两个轴承9内可以绕横向转动,在第一横向转动轴92的右端设置第一纵向摇臂26,在第一纵向摇臂26上铰接第二竖直拉杆25,在第一横向转动轴92的中部上面设置第三电机安装座32,在第三电机安装座32上安装第三电机31,在第三电机31上安装第三螺旋桨3,第一横向转动轴92的中部、第三电机安装座32的下面设置第四电机安装座42,在第四电机安装座42上安装第四电机41,在第四电机41上安装第四螺旋桨4,第三螺旋桨3是拉力螺旋桨,第四螺旋桨4是推力螺旋桨,设置第三螺旋桨3的旋转面和第四螺旋桨4的旋转面平行,当第三螺旋桨3的旋转面和第四螺旋桨4的旋转面水平时,第一纵向摇臂26水平向后。
206.在第一横向转动轴92的下面、左竖直柱97上设置轴承9,在第一横向转动轴92的下面、右竖直柱98上设置轴承9,设置第二横向转动轴65水平安装在第一横向转动轴92的下面、左竖直柱97上的轴承9和第一横向转动轴92的下面、右竖直柱98上的轴承9内,第二横向转动轴65在两个轴承9内可以绕横向转动,在第二横向转动轴65的右端设置第二纵向摇臂36。
207.在第二横向转动轴65的中部上面设置第五电机安装座52,在第五电机安装座52上安装第五电机51,在第五电机51上安装第五螺旋桨5,在第二横向转动轴65的中部下面、第五电机安装座52下面安装第六电机安装座62,在第六电机安装座62上安装第六电机61,在第六电机61上安装第六螺旋桨6。
208.设置第五螺旋桨5的旋转面和第六螺旋桨6的旋转面平行,当第五螺旋桨5的旋转面和第六螺旋桨6的旋转面水平时,第二纵向摇臂36水平向前。
209.在第二横向转动轴65的下面、左竖直柱97上设置轴承9,在第二横向转动轴65的下
面、右竖直柱98上设置轴承9,设置第三横向转动轴66水平安装在第二横向转动轴65的下面、左竖直柱97上的轴承9和第二横向转动轴65的下面、右竖直柱98上的轴承9内,第三横向转动轴66在两个轴承9内可以绕横向转动,在第三横向转动轴66的右端设置第三纵向摇臂46。
210.在第三横向转动轴66的中部上面设置第七电机安装座72,在第七电机安装座72上安装第七电机71,在第七电机71上安装第七螺旋桨7,在第三横向转动轴66的中部下面、第七电机安装座72下面安装第八电机安装座82,在第八电机安装座82上安装第八电机81,在第八电机81上安装第八螺旋桨8。
211.设置第七螺旋桨7的旋转面和第八螺旋桨8的旋转面平行,当第七螺旋桨7的旋转面和第八螺旋桨8的旋转面水平时,第三纵向摇臂46水平向前。
212.在第二纵向摇臂36和第三纵向摇臂46上共同铰接第四竖直拉杆45,第四竖直拉杆45同时操纵第二纵向摇臂36和第三纵向摇臂46等角度倾斜。
213.前竖直柱95的高度和后竖直柱96的高度相同,左竖直柱97的高度和右竖直柱98的高度相同,前竖直柱95、后竖直柱96的高度比左竖直柱97、右竖直柱98的高度高。
214.第一纵向转动轴91的高度比第一横向转动轴92的高度高,第一横向转动轴92的高度比第二横向转动轴65的高度高,第二横向转动轴65的高度比第三横向转动轴6的高度高。
215.第一横向摇臂16的高度比第一纵向摇臂26的高度高,第一纵向摇臂26的高度比第二纵向摇臂36的高度高,第二纵向摇臂36的高度比第三纵向摇臂46的高度高。
216.第一螺旋桨1的旋转面高度比第二螺旋桨2的旋转面高度高,第二螺旋桨2的旋转面高度高比第三螺旋桨3的旋转面高度高,第三螺旋桨3的旋转面高度比第四螺旋桨4的旋转面高度高,第四螺旋桨4的旋转面高度比第五螺旋桨5的旋转面高度高,第五螺旋桨5的旋转面高度比第六螺旋桨6的旋转面高度高,第六螺旋桨6的旋转面高度比第七螺旋桨7的旋转面高度高,第七螺旋桨7的旋转面高度比第八螺旋桨8的旋转面高度高。
217.操纵第一竖直拉杆16、第二竖直拉杆25和第四竖直拉杆45,使第一横向摇臂16、第一纵向摇臂26、第二纵向摇臂36和第三纵向摇臂46处于水平,第一螺旋桨1的旋转面和第二螺旋桨2的旋转面处于水平、第三螺旋桨3的旋转面和第四螺旋桨4的旋转面处于水平,第五螺旋桨5的旋转面和第六螺旋桨6的旋转面处于水平,第七螺旋桨7的旋转面和第八螺旋桨8的旋转面处于水平,这时,第一螺旋桨1的旋转中心和第二螺旋桨2的旋转中心、第三螺旋桨3的旋转中心、第四螺旋桨4的旋转中心、第五螺旋桨5的旋转中心、第六螺旋桨6的旋转中心、第七螺旋桨7的旋转中心和第八螺旋桨8的旋转中心的连线是一条垂直于水平面的直线,设置偏转螺旋桨直升机重心在这条直线上。
218.偏转螺旋桨直升机的宽度不超过两个螺旋桨的直径,偏转螺旋桨直升机机身窄长。
219.在机身75下、偏转螺旋桨直升机重心附近设置起落架76,这就构成了偏转螺旋桨直升机。
220.以下说明偏转螺旋桨直升机的工作原理。
221.设第一螺旋桨1逆时针转,第二螺旋桨2顺时针转,第三螺旋桨3逆时针转,第四螺旋桨4顺时针转,第五螺旋桨5逆时针转,第六螺旋桨6顺时针转,第七螺旋桨7逆时针转,第八螺旋桨8顺时针转。
222.第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5、第六螺旋桨6、第七螺旋桨7和第八螺旋桨8是尺寸相同的定距螺旋桨,第一电机11、第二电机21、第三电机31、第四电机41、第五电机51、第六电机61、第七电机71和第八电机81大小相同。
223.操纵第一竖直拉杆16、第二竖直拉杆25和第四竖直拉杆45,使第一横向摇臂16、第一纵向摇臂26、第二纵向摇臂36和第三纵向摇臂46处于水平,第一螺旋桨1的旋转面和第二螺旋桨2的旋转面处于水平、第三螺旋桨3的旋转面和第四螺旋桨4的旋转面处于水平,第五螺旋桨5的旋转面和第六螺旋桨6的旋转面处于水平,第七螺旋桨7的旋转面和第八螺旋桨8的旋转面处于水平,启动第一电机11、第二电机21、第三电机31、第四电机41、第五电机51、第六电机61、第七电机71和第八电机81使第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5、第六螺旋桨6、第七螺旋桨7和第八螺旋桨8同时以相同的转速转动, 第一螺旋桨1、第二螺旋桨2的反扭矩相互抵消,第三螺旋桨3、第四螺旋桨4的反扭矩相互抵消,第五螺旋桨5、第六螺旋桨6的反扭矩相互抵消,第七螺旋桨7、第八螺旋桨8的反扭矩相互抵消,偏转螺旋桨直升机保持航向的稳定。
224.继续相同的增大第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5、第六螺旋桨6、第七螺旋桨7和第八螺旋桨8的转速,第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5、第六螺旋桨6、第七螺旋桨7和第八螺旋桨8的升力增大,当总升力大于偏转螺旋桨直升机的重量时偏转螺旋桨直升机垂直上升。
225.相同的减少第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5、第六螺旋桨6、第七螺旋桨7和第八螺旋桨8的转速,第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5、第六螺旋桨6、第七螺旋桨7和第八螺旋桨8的升力减少,当总升力等于偏转螺旋桨直升机的重量时偏转螺旋桨直升机悬停。
226.继续相同的减少第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5、第六螺旋桨6、第七螺旋桨7和第八螺旋桨8的转速,第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5、第六螺旋桨6、第七螺旋桨7和第八螺旋桨8的升力减少,当总升力小于偏转螺旋桨直升机的重量时偏转螺旋桨直升机垂直下降。
227.当偏转螺旋桨直升机在空中,操纵第一竖直拉杆15向下拉动第一横向摇臂16,第一横向摇臂16向右下方向倾斜,带动第一纵向转动轴91向右转动,使第一螺旋桨1和第二螺旋桨2的旋转面向右倾斜,第一螺旋桨1和第二螺旋桨2的升力向右倾斜,偏转螺旋桨直升机向右横滚;操纵第一竖直拉杆15向上推动第一横向摇臂16,第一横向摇臂16向左上方向倾斜,带动第一纵向转动轴91向左转动,使第一螺旋桨1和第二螺旋桨2的旋转面向左倾斜,第一螺旋桨1和第二螺旋桨2的升力向左倾斜,偏转螺旋桨直升机向左横滚,实现操纵横滚。
228.当偏转螺旋桨直升机在空中,操纵第二竖直拉杆25向下拉动第一纵向摇臂26,第一纵向摇臂26向后下方向倾斜,带动第一横向转动轴92向后转动,使第三螺旋桨3和第四螺旋桨4的旋转面向后倾斜,第三螺旋桨3和第四螺旋桨4的升力向后倾斜,偏转螺旋桨直升机后仰;操纵第二竖直拉杆25向上推动第一纵向摇臂26,第一纵向摇臂26向上前方向倾斜,带动第一横向转动轴92向前转动,使第三螺旋桨3和第四螺旋桨4的旋转面向前倾斜,第三螺旋桨3和第四螺旋桨4的升力向前倾斜,偏转螺旋桨直升机前府,实现俯仰操纵。
229.当偏转螺旋桨直升机在空中,增大第一螺旋桨1、第三螺旋桨3、第五螺旋桨5和第
七螺旋桨7的转速,第一螺旋桨1、第三螺旋桨3、第五螺旋桨5和第七螺旋桨7的升力增大,逆时针转的第一螺旋桨1、第三螺旋桨3、第五螺旋桨5和第七螺旋桨7的反扭矩增大,同时,减少第二螺旋桨2、第四螺旋桨4、第六螺旋桨6和第八螺旋桨8的转速,第二螺旋桨2、第四螺旋桨4、第六螺旋桨6和第八螺旋桨8的升力减少,顺时针转的第二螺旋桨2、第四螺旋桨4、第六螺旋桨6和第八螺旋桨8反扭矩减少,逆时针转的第一螺旋桨1、第三螺旋桨3、第五螺旋桨5和第七螺旋桨7的反扭矩使偏转螺旋桨直升机顺时针转,即向右转向;减少第一螺旋桨1、第三螺旋桨3、第五螺旋桨5和第七螺旋桨7的转速,第一螺旋桨1、第三螺旋桨3、第五螺旋桨5和第七螺旋桨7的升力减少,逆时针转的第一螺旋桨1、第三螺旋桨3、第五螺旋桨5和第七螺旋桨7的反扭矩减少,同时,增大第二螺旋桨2、第四螺旋桨4、第六螺旋桨6和第八螺旋桨8的转速,第二螺旋桨2、第四螺旋桨4、第六螺旋桨6和第八螺旋桨8的升力增大,顺时针转的第二螺旋桨2、第四螺旋桨4、第六螺旋桨6和第八螺旋桨8反扭矩增大,顺时针转的第二螺旋桨2、第四螺旋桨4、第六螺旋桨6和第八螺旋桨8的反扭矩使偏转螺旋桨直升机逆时针转,即向左转向,实现航向操纵。
230.当偏转螺旋桨直升机在空中,操纵第四竖直拉杆45向下拉动第二纵向摇臂36和第三纵向摇臂46,第二纵向摇臂36和第三纵向摇臂46向前下方向倾斜45
°
,带动第二横向转动轴65和第三横向转动轴66向前转动45
°
,使第五螺旋桨5、第六螺旋桨6、第七螺旋桨7和第八螺旋桨8的旋转面向前倾斜45
°
,并同时增大第五螺旋桨5、第六螺旋桨6、第七螺旋桨7和第八螺旋桨8的转速。
231.设第五螺旋桨5、第六螺旋桨6、第七螺旋桨7和第八螺旋桨8的总升力为la,其在水平面方向的分力lax为:lax=la*sin(45
°
)lax=0.707la
………………………………………
(4)其在垂直方向的分力lay为:lay=la*sin(45
°
)lay=0.707l a
………………………………………
(5)lax+lay=0.707la+0.707lalax+lay=1.414la
………………………………………
(6)从式(6)可见,将第五螺旋桨5、第六螺旋桨6、第七螺旋桨7和第八螺旋桨8的旋转面向前倾斜45
°
其在水平面方向的分力lax和垂直方向的分力lay是第五螺旋桨5、第六螺旋桨6、第七螺旋桨7和第八螺旋桨8的总升力的1.414倍,相当于放大了第五螺旋桨5、第六螺旋桨6、第七螺旋桨7和第八螺旋桨8的总升力,提高了第五螺旋桨5、第六螺旋桨6、第七螺旋桨7和第八螺旋桨8的效率。
232.第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4的升力和第五螺旋桨5、第六螺旋桨6、第七螺旋桨7、第八螺旋桨8在垂直方向的分力lay共同平衡偏转螺旋桨直升机的重量,第五螺旋桨5、第六螺旋桨6、第七螺旋桨7和第八螺旋桨8在水平方向的分力lax驱动偏转螺旋桨直升机水平向前飞行,无需操纵前府就可以向前水平飞行,提高了乘坐的舒适性。
233.第一螺旋桨1和第二螺旋桨2共同操纵偏转螺旋桨直升机的横滚。
234.第三螺旋桨3和第四螺旋桨4共同操纵偏转螺旋桨直升机的俯仰。
235.第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5、第六螺旋桨6、第七螺旋桨7和第八螺旋桨8共同操纵偏转螺旋桨直升机的航向。
236.当第一螺旋桨1出现故障,第二螺旋桨2操纵偏转螺旋桨直升机的横滚,还能保持横向稳定,纵向稳定不受影响,航向稳定受到影响,通过关闭第六电机61,使第六螺旋桨6不转动,保持航向稳定,在横向、纵向和航向保持稳定的情况下,安全紧急迫降。
237.当第二螺旋桨2出现故障,第一螺旋桨1操纵偏转螺旋桨直升机的横滚,还能保持横向稳定,纵向稳定不受影响,航向稳定受到影响,通过关闭第五电机51,使第五螺旋桨5不转动,保持航向稳定,在横向、纵向和航向保持稳定的情况下,安全紧急迫降。
238.当第三螺旋桨3出现故障,第四螺旋桨4操纵偏转螺旋桨直升机的俯仰,还能保持纵向稳定,横向稳定不受影响,航向稳定受到影响,通过关闭第六电机61,使第六螺旋桨6不转动,保持航向稳定,在横向、纵向和航向保持稳定的情况下,安全紧急迫降。
239.当第四螺旋桨4出现故障,第三螺旋桨3操纵偏转螺旋桨直升机的俯仰,还能保持纵向稳定,横向稳定不受影响,航向稳定受到影响,通过关闭第五电机51,使第五螺旋桨5不转动,保持航向稳定,在横向、纵向和航向保持稳定的情况下,安全紧急迫降。
240.当第五螺旋桨5出现故障,纵向和横向稳定不受影响,航向稳定受到影响,通过关闭第六电机61,使第六螺旋桨6不转动,保持航向稳定,在横向、纵向和航向保持稳定的情况下,安全紧急迫降。
241.当第六螺旋桨6出现故障,纵向和横向稳定不受影响,航向稳定受到影响,通过关闭第五电机51,使第五螺旋桨5不转动,保持航向稳定,在横向、纵向和航向保持稳定的情况下,安全紧急迫降。
242.当第七螺旋桨7出现故障,纵向和横向稳定不受影响,航向稳定受到影响,通过关闭第八电机81,使第八螺旋桨8不转动,保持航向稳定,在横向、纵向和航向保持稳定的情况下,安全紧急迫降。
243.当第八螺旋桨8出现故障,纵向和横向稳定不受影响,航向稳定受到影响,通过关闭第七电机71,使第七螺旋桨7不转动,保持航向稳定,在横向、纵向和航向保持稳定的情况下,安全紧急迫降。
244.任意一个螺旋桨出现故障,依靠另外7个螺旋桨紧急迫降,提高了飞行的安全性。
245.除了设置第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、第五螺旋桨5、第六螺旋桨6、第七螺旋桨7和第八螺旋桨8是尺寸相同的定距螺旋桨,第一电机11、第二电机21、第三电机31、第四电机41、第五电机51、第六电机61、第七电机71和第八电机81大小相同。
246.还可以设置第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4、是尺寸相同的定距螺旋桨,第一电机11、第二电机21、第三电机31、第四电机41大小相同。
247.第五螺旋桨5、第六螺旋桨6、第七螺旋桨7和第八螺旋桨8是尺寸相同的定距螺旋桨,第五电机51、第六电机61、第七电机71和第八电机81大小相同。
248.第五螺旋桨5、第六螺旋桨6、第七螺旋桨7和第八螺旋桨8与第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4的直径相同,第五螺旋桨5、第六螺旋桨6、第七螺旋桨7和第八螺旋桨8的桨叶数量大于第一螺旋桨1、第二螺旋桨2、第三螺旋桨3、第四螺旋桨4的桨叶数量。
249.第五电机51、第六电机61、第七电机71和第八电机81的功率大于第一电机11、第二电机21、第三电机31、第四电机41的功率。
250.第五螺旋桨5、第六螺旋桨6、第七螺旋桨7和第八螺旋桨8提供大部分的升力,飞行原理不变。
251.图6是本发明偏转螺旋桨直升机的螺旋桨保护环的设置轴测图,为了简化画图,图6中略去偏转螺旋桨直升机螺旋桨、纵向转动轴、纵向摇臂、横向摇臂等部件,略去的部件参见图1。
252.在偏转螺旋桨直升机的前竖直柱95和后竖直柱96的顶部设置第一保护环77,第一保护环77的直径大于第一螺旋桨1的直径,第一保护环77起到保护第一螺旋桨1、第二螺旋桨2和加固前竖直柱95和后竖直柱96的作用。
253.在左竖直柱97和右竖直柱98的顶部设置第二保护环78,第二保护环78的直径大于第三螺旋桨3的直径,第二保护环78起到保护第三螺旋桨3、第四螺旋桨4和加固左竖直柱97和右竖直柱98的作用。