1.本发明属于无人机多自由度机械臂装置。
背景技术:
2.目前无人机的应用大多数停留在拍摄、监测层面,人们不满足于“看”,于是就有研究人员设想出无人机搭载机械臂,组合成了空中机器人,实现无人机“做”事情的功能。
3.2016年,日本制造商prodrone发布了搭载双臂的大型无人机—pd6b-aw-arm,它的机身由该公司现有无人机pd6b-aw模型制成,配备了两个可灵活操作的5轴机械臂,能抓取并搬运各种形状的物品,能在高达5000米高空、距离较远或较危险的环境中执行任务,如切断电缆、收取危险物品、投掷救生圈等,其总负载高达10kg,续航时间约30分钟,这款无人机虽然可以利用机械臂对机身进行固定,但是只能在树枝或栏杆上进行一个间歇的停留,主要还是依靠起落架站立。
4.2018年,韩国首尔大学的科学家研究员也研究出了一款无人机与机械臂的组合,这款无人机的机械臂采用“折纸”的原理,将能变形的盒子串联在一起,并在无人机顶部安装可控制的电动机来拉动他的线来控制机械臂的收缩与伸长,闲时可以收缩,完全不占用空间,用时可以拉伸成70厘米长的机械臂,然后搭载相机和机械抓手等不同的设备,以完成相应的任务,如收集样本或检查烟囱、管道和其他狭窄空间,清理沟渠抓取垃圾,但是他的不足之处在于机械臂只能朝正下方延伸,机械臂的工作范围有限。
5.2019年,国内的南京理工大学设计出一种排爆无人机,在其机身安装机械臂云台来抓取雷管,然后投放到安全的位置,但是考虑到真实环境,例如土丘、沟壑、弹坑等复杂的地形上,无人机没办法顺利降落或者在降落点保持稳定,即使能够降落,抓手距离地面的高度比在平地低的多,会导致机械臂抓取的雷管不能有效、准确地投放在目标点,由此可知,面对复杂工况,排爆无人机实现自主站立的功能尤为重要。
技术实现要素:
6.目前已经有公司通过无人机来送外卖和快递包裹,但是实践效果并不好,其中的一个原因就是无人机不能很好的搭载物品,无人机与机械臂的结合,突破了传统机械臂固定位置作业的局限性;机械臂的多自由度与无人机的高机动性结合在一起,提高了无人机的功能性,增加了机械臂的工作范围,使无人机能够实现三维空间中快速目标抓取等任务。
7.开发机械臂的支撑功能,使得无人机不再需要功能单一的起落架,利用机械臂就能实现长时间的自主站立,并且由于机械臂本身的长度,使无人机在降落后,机身相对于地面保持一定的高度,能够保护无人机。
8.添加减震机构,提供缓冲功能,减少降落时地面对机身的冲击,增加无人机在复杂地形降落和运送物品的安全稳定性。
9.为了克服现有技术的不足,实现上述的目的,本发明提供了一种空中机器人多功能机械臂装置,其具体方案如下。
10.1、总体方案(1)组成:一条完整的机械臂是由1个减震机构、3个机械臂、2个舵机、1个电机、间歇机构和2个机械爪组成。
11.(2)无人机机械臂实现抓取功能所需关节数:由于无人机可以自主转体,故机械臂只需满足前后方向的转动即可。但若只使用一个关节,则不仅会导致无人机的整体尺寸过大,不易收纳,而且也会导致机械臂不够灵活,因此采用两个关节来控制机械臂,即需要两个舵机。
12.2、无人机机械臂构型无人机机械臂要在满足强度要求的情况下尽可能的轻便,故采用x型栅栏结构,但考虑到舵机(23)的安装,其安装平面不能采用相同结构,为使其尽可能在保证强度的条件下体积最小,见说明书附图1;另外,机械臂(1)上端有两个圆柱,小圆柱用于固定弹簧(22),大圆柱是在减震机构的套筒(17)中移动;大圆柱上有三个轴线与大圆柱垂直的小圆柱,每个小圆柱之间的夹角为120
°
,用来防止机械臂(1)在套筒(17)中发生转动。
13.机械臂(2)见说明书附图2,由于其无需安装舵机,故其都采用x型栅栏结构。
14.机械臂(3)见说明书附图3,因为只需在其两端安装一个舵机(25)和一个电机(13),所以中间部分全部采用x型栅栏结,而安装电机(13)的一端由于机械爪(4)、(5)需要旋转,为防止机械爪(4)、(5)与机械臂(3)发生碰撞,故进行开槽。
15.3、工作空间当机械臂两处关节电机轴平行时,机械臂的可达空间只能在某个平面内,其中o点为机械臂第一关节轴,以l2为半径得到圆1,由于舵机转角为270
°
,故一半只有135
°
;以圆1为圆心做以l3为半径的圆,见说明书附图4,其中以圆1为圆心得到的圆弧即为机械臂可达处。
16.经过对称处理后,最终所得机械臂可达运动空间区域见说明书附图5;当机械臂两处关节电机轴垂直时,机械臂可达运动空间在三维空间内,见说明书附图6;而其在xoz、yoz平面内的投影见说明书附图7、8;将机械臂关节轴平行和垂直情况下的可达运动空间移至一处进行比较,见说明书附图9,其中黑色线条为机械臂关节轴平行情况下的可达运动空间范围,红色线条为机械臂关节轴垂直情况下的可达运动空间范围。
17.4、无人机机械爪传动方案机械爪的传动部分应满足两个功能,分别是机械爪的开合及机械爪向上旋转。
18.无人机在运行过程中,用电机(13)正反转控制无人机机械爪张开和闭合。
19.当无人机要停在地面时,机械爪闭合,电机(13)继续旋转,此时无人机机械爪不再运动,而是整体向上旋转,使机械臂(3)与地面接触时,无人机机械爪不与地面发生干涉,见说明书附图10。
20.间歇机构可以保证机械爪开合及整体向上旋转能够按顺序进行,传动方案见说明书附图11、12、13所示,其中(6)、(10)为完全齿轮,(7)、(9)为齿轮轴,(13)为电机,(12)为电机轴,(14)为不完全齿轮,(11)为主动拨盘,(28)为圆柱销,(8)、(15)、(27)为槽轮机构的一部分。
21.传动分析:不完全齿轮(14)和主动拨盘(11)都固定在电机轴(12)上,两个机械爪则分别和齿轮(6)、(10)固定在齿轮轴(7)、(9)上,而齿轮轴(7)、(9)则和(8)固定在一起,当电机(13)带动电机轴(12)发生转动时,不完全齿轮(14)带动齿轮(10)转动;由于齿轮(6)与
齿轮(10)外啮合,故齿轮(6)、(10)发生相对转动,与齿轮轴(7)、(9)连接的两个机械爪(4)、(5)则随着齿轮(6)、(10)的转动而转动,则电机(13)的正反转带动了机械爪(4)、(5)的开合运动;当机械爪(4)、(5)完全闭合后,电机(13)继续同向转动时,不完全齿轮(14)与齿轮(10)不再啮合,此时主动拨盘(11)上的圆柱销进入槽轮(15)的槽内;当电机(13)继续旋转,主动拨盘(11)的转动带动槽轮(15)的转动,由于机械爪(4)、(5)与齿轮(6)、(10)和槽轮(15)通过圆柱轴(27)固定在一起,从而槽轮(15)的旋转带动机械爪(4)、(5)向上旋转;从而电机(13)即实现机械爪(4)、(5)开合的功能,又实现整个机械爪(4)、(5)的旋转功能。
22.机械爪结构:机械爪(4)见说明书附图14,由两个圆弧组成,上下由圆柱连接,圆柱轴心布在爪两圆弧的中心线位置,机械爪(4)末端处开槽是为了防止机械爪在旋转的时候与槽轮的轴接触而无法闭合的情况。
23.机械爪(5)见说明书附图15,其圆弧形状和机械爪(4)完全相同,但机械爪(5)上平面与下平面距离要小于机械爪(4)上平面与下平面的距离,故其在两端处各有一个斜面。
24.5、减震机构为避免无人机机械臂在释放物体后所产生的冲击载荷影响无人机自身的平衡性,故增加减震机构来减小冲击载荷,见说明书附图16、17,其中套筒(17)直接与无人机平台(24)通过螺钉(16)相连,套筒(17)内部装有弹簧(22),机械臂1与弹簧(22)相连;其中套筒(17)开槽作为导向机构,防止机械臂(1)在套筒(17)内旋转而发生转动;套筒(17)通过螺钉(18)与圆盖(25)相连,以此将减震机构和机械臂(1)连接在一起。
25.6、机械臂关节处电机轴方向当无人机机械臂(3)支撑无人机站立的时候,无人机的机械爪(4)、(5)可不考虑,故除去机械爪(4)、(5)部位,剩余两处关节,而两处关节的电机轴分别有平行和垂直两种情况,虽然机械臂关节处电机轴垂直时的可达运动空间范围要优于机械臂关节处电机轴平行时的可达运动空间范围,但由于无人机自身的移动,其差距不大,而且在无人机站立的情况下,若机械臂关节处电机轴垂直,机械臂(1)与机械臂(2)要保证角度固定,所以综合考虑下,选取关节处电机轴平行的情况,其简图见说明书附图18。
26.本发明具有如下有益的技术效果:本次发明提供一种空中机器人多功能机械臂装置,为机械臂多功能化提供了新的思路,打破了传统机械臂的局限性,能够在更多的场合应用,并使其应用更具有灵活性。
27.在功能上,既实现了传统机械臂的抓取功能,又能实现支撑无人机站立的功能,使无人机在地面停留时不再需要专门的支撑机构,直接由机械臂支撑无人机站立,扩大了机械臂的应用范围,同时机械臂的手臂能够与地面直接接触,并且接触面积较大,使得无人机能够稳定站立。
28.在结构上,减少了功能单一的起落架,不仅减轻了重量,而且减小了收纳无人机的空间;增加了减震机构,能减小冲击载荷来避免它对无人机自身的平衡性和货物安全性的影响。
29.利用不完全齿轮和槽轮机构的组合,既能实现机械爪的开合,又能实现机械爪的向上旋转,这种结构使得机械爪能正常抓取目标,且不影响机械臂的整个手臂与地面的贴合,保证了机械臂站立功能的稳定性。
附图说明
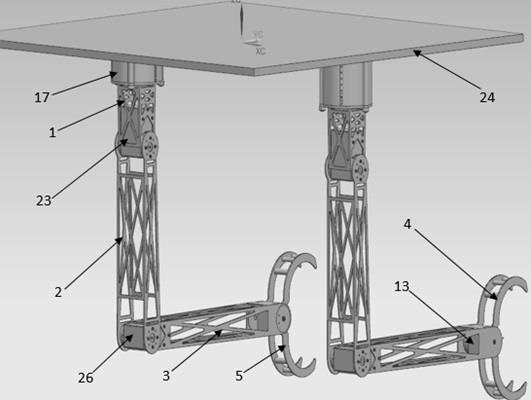
30.图1是无人机站立简图;图2是机械臂(1)三维图;图3是机械臂(2)三维图;图4是机械臂(3)三维图;图5是机械臂可达运动空间图;图6是机械臂可达运动空间区域图;图7是机械臂可达运动空间三维图;图8是机械臂可达运动空间xoz投影图;图9是机械臂可达运动空间yoz投影图;图10是机械臂可达运动空间比较图;图11、12、13是三个不同角度的机械爪传动三维图;图14是机械爪(4)三维图;图15是机械爪(5)三维图;图18 是机械臂关节电机轴平行时简图;图16是减震机构三维图;图17是减震机构爆炸图;图19是机械臂总体结构图;图20和图21是机械臂相关变量图;图22是机械臂受力图。
31.附图标记说明:1-第一节机械臂,2-第二节机械臂,3-第三节机械臂,4-上机械爪,5-下机械爪,6-完全齿轮1,7-齿轮轴1,8-扇形盘,9-齿轮轴2,10-完全齿轮2,11-主动拨盘,12-电机轴,13-电机,14-不完全齿轮,15-槽轮,16-套筒螺钉(连接套筒(17)和无人机平面(24)),17-套筒,18-套筒螺钉(连接套筒(17)和机械臂(1)),19-舵机螺钉(固定舵机(23)), 20-舵盘(舵机(23)),21-舵机螺钉(固定舵盘(20)),22-为弹簧,23-舵机(固定于机械臂(1)),24-无人机平台,25-圆盖,26-舵机(固定于机械臂(3)),27-圆柱轴,28-圆柱销。
具体实施方式
32.首先对空中机器人多功能机械臂装置的主要部分进行设计计算、选型和材料选取。
33.(1)无人机平台的选取:本实例的无人机选择小型旋翼无人机,重量处于10-30kg范围内,载重量在10kg左右,综合无人机的载重量、续航时间及用途,选择科卫泰kwt-x6l型号无人机作为本实例的无人机平台,其主要参数如下表所示:厂家型号空机重量(kg)载重量(kg)续航时间(min)用途科卫泰kwt-x6l/11.560工业表1 无人机主要参数(2)机械臂长度计算:所选机械臂受力与、、、和有关,见说明书附图20;由于其变量太多,所求表达式过于复杂,故对其模型进行简化,其简化模型见说明书附图21,此模型下为定值,与无人机重心高度及减震机构整体长度有关,变量。
34.模型所受倾覆力最终可在其中心点出转化为、、,为了简化算法,将其分别单独作用,此处列出其中一种情况:当受力为时,对无人机整体进行受力分析,见说明书附图22,可得到下式8-1:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8-1)对于o处转矩进行分析,得到下式8-2:
ꢀꢀꢀꢀꢀꢀꢀꢀ
(8-2).经过计算分析,最终机械臂长度=350mm,d=500mm。
35.(3)机械臂可达运动空间:经过上述方法的计算,得到机械臂(2)长度,由此得到机械臂可达运动空间图5和机械臂可达运动区域图6。
36.(4)电机选型:本实例要使无人机机械臂既能举起一定质量的重物并倾斜一定的角度,经过比较,选用ds5160舵机,而机械爪部位由于所受扭矩较小,可选择protescap品牌p310系列电机。
37.(5)机械臂材料选取:由于机械臂要求轻便,故需选取密度小、强度大的材料,综合材料的强度、寿命、成本密度等参数,最终选择增强型尼龙66作为机械臂所用材料,其性能参数如下表所示: 密度/(g/)1.14~1.15抗拉强度/mpa55.86~81.34抗弯强度/mpa98~107.8抗压强度/mpa88.2~117.6表2 尼龙66力学性能表下面结合附图和具体实施方式来进一步说明本发明。
38.见说明书附图19,一条完整的机械臂由1个减震机构、3个机械臂、2个舵机、1个电机(13)、一个间歇机构和2个机械爪组成;其中,减震机构的一端与无人机平台(24)相连,另一端与机械臂(1)上端的大圆柱相连;机械臂(1)下端固定舵机(23),并通过舵机(23)与机械臂(2)一端连接,舵机(23)用于控制机械臂(2)的转动;机械臂(3)的一端固定舵机(26),并通过舵机(26)与机械臂(2)的另一端相连,舵机(26)用于控制机械臂(3)转动;机械臂(3)的另一端固定用于控制机械爪的间歇机构;机械爪与间歇机构中的齿轮轴相连,通过电机(13)控制机械爪的张开、闭合和向上旋转;一条完整的机械臂有两个关节,每个关节来处安装一个舵机来控制机械臂转动,并且机械臂关节处的电机轴相互平行。
39.见说明书附图2,机械臂(1)下端作减重处理,未安装舵机(23)的两个平面采用x型栅栏结构,安装舵机的两个平面采用图2中样式;另外,机械臂(1)上端有两个圆柱,小圆柱用于固定弹簧(22),大圆柱是在减震机构的套筒(17)中移动,大圆柱上有三个轴线与大圆柱垂直的小圆柱,每个小圆柱之间的夹角为120
°
,用来防止机械臂(1)在套筒(17)中发生转动。
40.见说明书附图3,机械臂(2)无需安装舵机,四个面都采用x型栅栏结构。
41.见说明书附图4,机械臂(3)的两端只需安装一个舵机(25)和一个电机(13),所以中间四个面全部采用x型栅栏结构,而机械臂(3)安装电机(13)的一端由于机械爪(4)、(5)需要旋转,为防止机械爪(4)、(5)与机械臂(3)发生碰撞,故进行开槽。
42.见说明书附图11、12、13,电机(13)通过间歇机构可以控制机械爪的开合及整体向
上旋转,并能够保证机械爪的开合和向上旋转按顺序进行,间歇机构由为不完全齿轮(14)、槽轮机构、完全齿轮(6)、完全齿轮(10)、齿轮轴(7)、齿轮轴(9)、电机(13)和电机轴(12)组成,其中,槽轮机构由主动拨盘(11)、圆柱销(28)、槽轮(15)、圆柱轴(27)和扇形盘(8)组成。
43.见说明书附图14,机械爪(4)由两个圆弧组成,上下由圆柱连接,圆柱轴心布在爪两圆弧的中心线位置,机械爪(4)末端处开槽是为了防止机械爪在旋转的时候与槽轮的轴接触而无法闭合的情况。
44.见说明书附图15,机械爪(5)的圆弧形状和机械爪(4)完全相同,但机械爪(5)上平面与下平面距离要小于机械爪(4)上平面与下平面的距离,故其在两端处各有一个斜面。
45.见说明书附图16、17,减震机构中的套筒(17)直接与无人机平台(24)通过螺钉(16)相连,套筒(17)内部装有弹簧(22),机械臂(1)上端与弹簧(22)相连,其中,套筒(17)开槽作为导向机构,防止机械臂(1)在套筒(17)内发生转动,套筒(17)通过螺钉(18)与圆盖(25)相连,以此将减震机构和机械臂(1)连接在一起。
46.本发明的工作过程如下。
47.抓取过程:将装置安装好后,无人机飞到目标上方,舵机(23)控制机械臂(2)转动,舵机(26)控制机械臂(3)转动,然后将机械爪送到目标处;此时电机(13)开始工作,带动电机轴(12)上的不完全齿轮(14)发生转动,进而带动外啮合的齿轮(10)和齿轮(6)发生相对转动,然后与齿轮轴(7)、(9)连接的两个机械爪(4)、(5)则随着齿轮(6)、(10)的转动而转动,则电机(13)的正反转带动了机械爪(4)、(5)的开合运动,实现对目标的抓取和释放。
48.站立过程:当无人机完成抓取任务后,此时机械爪(4)、(5)完全闭合,电机(13)继续同向转动,不完全齿轮(14)与齿轮(10)不再啮合,此时主动拨盘(11)上的圆柱销(28)进入槽轮(15)的槽内,当电机(13)继续旋转时,主动拨盘(11)的转动带动槽轮(15)的转动,由于机械爪(4)、(5)与齿轮(6)、(10)和槽轮(15)通过圆柱轴(27)固定在一起,从而槽轮(15)的旋转带动机械爪(4)、(5)向上旋转,进而避免了机械爪与地面发生干涉;此时舵机(26)控制机械臂(3)转动,直至与地面完全贴合,从而实现无人机稳定的站立。
49.若工作过程中遇到冲击载荷,机械臂(1)会沿着套筒(17)的导向槽方向运动,由弹簧吸收部分载荷,起到减震的作用。
50.实施例的效果:本实例中的无人机机械臂,能在三维空间内灵活抓取、释放重物,并且能带动重物转动;无人机可运输10kg的货物,并在机械臂完全伸直状态下,将该10kg货物往前和往后皆扬起了至少45度;本实例中的机械爪能正常开合实现抓取功能,并且机械爪能向上旋转,避免与地面的干涉,不会影响机械臂的整个手臂与地面的贴合,能实现机械臂支撑无人机的站立功能,且稳定性好;另外减震机构能消除无人机在卸货后所受到的冲击载荷,起到了减震效果,保证了无人机和货物的安全稳定性。