1.本实用新型涉及机器人技术领域,尤其涉及的是一种仿生四足机器人。
背景技术:
2.目前继工业机器人、协作机器人成熟和推广之后,移动机器人的研究投入了极大的人力和物力。
3.现有技术中,足式机器人的一般结构为身体部分加上机械腿,其中机械腿作为足式机器人的执行机构,需要实现行走以及相应的工具作业等动作。机械腿的性能直接影响足式机器人的性能,因此机械腿的设计成为足式机器人设计中的重中之重。然而,现有足式机器人的机械腿多为并联机构或串并混联机构,具有工作空间小的问题,且现有足式机器人还存在智能化程度低以及集成度较低的问题。
4.因此,现有技术还有待于改进和发展。
技术实现要素:
5.本实用新型要解决的技术问题在于,针对现有技术的上述缺陷,提供一种仿生四足机器人,旨在解决现有技术中足式机器人的机械腿的工作空间小的问题。
6.本实用新型解决技术问题所采用的技术方案如下:
7.一种仿生四足机器人,包括机身部件以及安装在所述机身部件上的四条机械腿,其中,所述机身部件的前端设置有工业相机,所述机身部件的内部设置有与所述工业相机电连接的控制器,以及与所述控制器电连接的陀螺仪;所述四条机械腿均包括:
8.第一关节模组;
9.第二关节模组,与所述第一关节模组连接;
10.第三关节模组,与所述第二关节模组连接;
11.大腿,与所述第三关节模组连接;
12.小腿,与所述大腿转动连接,且与所述第三关节模组连接;
13.其中,所述第一关节模组驱动所述第二关节模组转动;所述第二关节模组驱动所述第三关节模组转动;所述第三关节模组驱动所述小腿转动;
14.所述第二关节模组的转动中心轴垂直于所述第三关节模组的转动中心轴。
15.所述的仿生四足机器人,其中,所述机身部件包括由前安装板、后安装板、底板、顶板、左侧板和右侧板组成的矩形壳体,所述前安装板和后安装板之间通过四根碳纤维管连接,所述前安装板和所述后安装板之间还设置有中间隔板,所述四根碳纤维管均穿过所述中间隔板。
16.所述的仿生四足机器人,其中,所述矩形壳体的内部设置有主电池和辅电池,与所述主电池电连接的驱动电机,所述辅电池与所述陀螺仪和控制器电连接。
17.所述的仿生四足机器人,其中,
18.所述小腿的转动中心轴平行于所述第三关节模组的转动中心轴。
19.所述的仿生四足机器人,其中,
20.所述第三关节模组通过同步组件与所述小腿连接;所述同步组件包括:
21.主同步带轮,与所述大腿转动连接;
22.从同步带轮,与所述大腿转动连接,且与所述小腿连接;
23.同步带,环绕所述主同步带和所述从同步带设置;
24.其中,所述第三关节模组驱动所述主同步带轮转动。
25.所述的仿生四足机器人,其中,所述大腿上设置有同步带张紧调节器。
26.所述的仿生四足机器人,其中,所述第一关节模组为一级减速关节模组,所述一级减速关节模组包括:
27.第一定子法兰,具有容纳空间;
28.第一输出法兰,位于所述容纳空间内,且与所述第二关节模组连接;
29.第一穿线管,与所述第一输出法兰连接;
30.第一减速机,所述第一减速机套设在所述第一穿线管外;
31.第一电机转子,与所述第一穿线管连接;
32.第一电机定子,设置于所述第一定子法兰;
33.其中,所述第一电机定子围绕所述第一减速机设置,所述第一电机转子围绕所述第一电机定子设置。
34.所述的仿生四足机器人,其中,所述第一关节模组为二级减速关节模组,所述二级减速关节模组包括:
35.第二定子法兰,具有容纳空间;
36.第二穿线管,位于所述容纳空间内;
37.一级输出法兰和二级输出法兰,与所述第二穿线管连接;所述二级输出法兰与所述第二关节模组连接;
38.一级减速机,套设在所述第二穿线管外并与所述一级输出法兰连接;
39.二级减速机,套设在所述第二穿线管外并与所述二级输出法兰连接;
40.第二电机转子,与所述第二穿线管连接;
41.第二电机定子,设置于所述第二定子法兰;
42.其中,所述第二电机定子围绕所述一级减速机设置,所述第二电机转子围绕所述电机定子设置;所述二级减速机位于所述第二电机定子外。
43.所述的仿生四足机器人,其中,
44.所述第一关节模组通过第一连接件与所述第二关节模组连接,所述第一连接件上设置有第一轴承;和/或
45.所述第二关节模组通过第二连接件与所述第三关节模组连接,所述第二连接件上设置有第二轴承。
46.所述的仿生四足机器人,其中,所述小腿的底端设置有足垫,所述足垫上设置有力传感器。
47.有益效果:本实用新型通过将相机、陀螺仪集成到仿生四足机器人的机身部件上,让仿生四足机器人更加智能,同时本实用新型还通过三个关节模组串联来实现机械腿在上下左右前后六个方向上的移动,提高了机械腿的工作空间,让所述仿生机器人具有更大的
活动范围。
附图说明
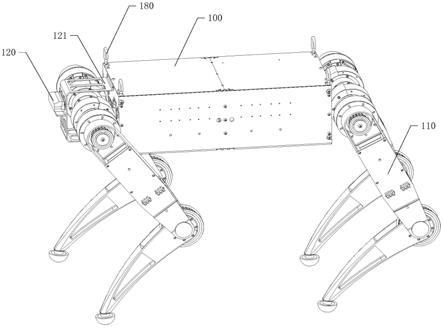
48.图1是本实用新型一种仿生四足机器人的结构示意图。
49.图2是本实用新型一种仿生四足机器人的爆炸图。
50.图3是本实用新型中机械腿的结构示意图。
51.图4是本实用新型中机械腿的第一爆炸图。
52.图5是本实用新型中机械腿的第二爆炸图。
53.图6是本实用新型中一级减速关节模组的剖视图。
54.图7是本实用新型中一级减速关节模组的结构示意图。
55.图8是本实用新型中一级减速关节模组的爆炸图。
56.图9是本实用新型中二级减速关节模组的结构示意图。
57.图10是本实用新型中二级减速关节模组的剖视图。
58.图11是本实用新型中二级减速机和二级减速机的结构示意图。
59.图12是本实用新型中二级减速关节模组的爆炸图。
60.附图标记说明:
61.100、机身部件;101、前安装板;102、后安装板;103、底板;104、顶板;105、左侧板;106、右侧板;107、碳纤维管;108、中间隔板;109、安装孔;110、机械腿;120、工业相机;121、相机支撑板;130、控制器;140、陀螺仪;150、主电池;160、辅电池;170、驱动电机;180、吊环;1、第一关节模组;11、第一连接件;12、第一轴承;11a、第一定子法兰;12a、第一输出法兰;13a、第一穿线管;14a、第一减速机;141a、第一内齿圈;142a、第一太阳轮;143a、第一行星轮;15a、第一电机转子;16a、第一电机定子;11b、第二定子法兰;12b、第二穿线管;13b、一级输出法兰;14b、二级输出法兰;15b、一级减速机;151b、一级内齿圈;152b、一级太阳轮;153b、一级行星轮;16b、二级减速机;161b、二级内齿圈;162b、二级太阳轮;163b、二级行星轮;17b、第二电机转子;18b、第二电机定子;2、第二关节模组;21、第二连接件;22、第二轴承;3、第三关节模组;4、大腿;41、同步组件;411、主同步带轮;412、从同步带轮;413、同步带;42、同步带张紧调节器;5、小腿;51、足垫。
具体实施方式
62.为使本实用新型的目的、技术方案及优点更加清楚、明确,以下参照附图并举实施例对本实用新型进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
63.请同时参阅图1-图12,本实用新型提供了一种仿生四足机器人的一些实施例。
64.如图1-图4所示,本实用新型提供的仿生四足机器人包括:
65.机身部件100以及安装在所述机身部件100上的四条机械腿110,其中,所述机身部件100的前端设置有工业相机120,所述机身部件100的内部设置有与所述工业相机120电连接的控制器130,以及与所述控制器130电连接的陀螺仪140;四条所述机械腿110均包括:
66.第一关节模组1;
67.第二关节模组2,与所述第一关节模组1连接;
68.第三关节模组3,与所述第二关节模组2连接;
69.大腿4,与所述第三关节模组3连接;
70.小腿5,与所述大腿4转动连接,且与所述第三关节模组3连接;
71.其中,所述第一关节模组1驱动所述第二关节模组2转动;所述第二关节模组2驱动所述第三关节模组3转动;所述第三关节模组3驱动所述小腿5转动;
72.所述第二关节模组2的转动中心轴垂直于所述第三关节模组3的转动中心轴。
73.在本实施例中,如图2所示,所述机身部件100包括由前安装板101、后安装板102、底板103、顶板104、左侧板105和右侧板106组成的矩形壳体,所述前安装板101和后安装板102之间通过四根碳纤维管107连接,所述前安装板101和所述后安装板102之间还设置有中间隔板108,所述四根碳纤维管107均穿过所述中间隔板108。所述中间隔板108对所述四根碳纤维管107具有支撑的作用,这样所述前安装板、后安装板、中间隔板以及碳纤维管就组成了机身部件100的主要受力框架结构,所述仿生四足机器人的负载主要是由这个框架结构承受。
74.在本实施例中,所述前安装板101和所述后安装板102上均设置有两个安装孔109,所述机械腿110通过所述安装孔109安装在所述机身部件100上。所述仿生四足机器人主要由机身部件100和四条机械腿110这两大部分组成,共有12个自由度,每条机械腿有三个自由度,机身部件100有6个自由度,可以实现xyz三个方向的平动以及绕xyz三个轴的转动。
75.在本实施中,所述前安装板101上安装有相机支撑板121,所述工业相机120安装在所述相机支撑板121上,所述工业相机120能够感知周围环境,比如路线,地形等环境信息,并传输给机器人控制器130,控制器130据此做出决策控制仿生四足机器人进行对应的动作。作为举例,所述工业相机可以为ccd相机,但不限于此。
76.在本实施例中,所述控制器130安装在底板103上,控制器130控制仿生四足机器人的所有运行逻辑;所述底板103上还安装有陀螺仪140,所述陀螺仪140能够实时感知仿生四足机器人的姿态,并将姿态信息传输给控制器130,控制器130据此做出决策控制机器人进行对应的动作。
77.在本实施例中,所述底板103上还设置有主电池150和辅电池160,与所述主电池150电连接的驱动电机170,所述辅电池160与所述陀螺仪140和控制器130分别电连接。所述驱动电机170可设置12个,用于驱动仿生四足机器人的机械腿运动。
78.在本实施中,所述机械腿的第一关节模组1安装在所述安装孔109上,由于所述第二关节模组2的转动中心轴垂直于所述第三关节模组3的转动中心轴,也就是说,第二关节模组2的转动面垂直于第三关节模组3转动面。第一关节模组1可驱动第二关节模组2转动,从而带动小腿5沿左右两个方向移动。第二关节模组2可驱动第三关节模组3转动,从而带动小腿5沿前后两个方向移动。第三关节模组3可驱动小腿5转动,具体驱动小腿5沿上下两个方向移动。通过三个关节模组串联实现机械腿在上下左右前后六个方向上的移动,提高了机械腿的工作空间。
79.此外,将第三关节模组3与第二关节模组2连接,使得第三关节模组3靠近机身,以达到减小整个机械腿的惯量。本实用新型采用三个关节模组实现机械腿的活动,具有结构简单、运动控制容易、机构拓扑简单的有益效果,从而减小足式机器人研制的难度和成本。
80.在本实用新型实施例的一个较佳实现方式中,如图3-图4所示,所述小腿5的转动
中心轴平行于所述第三关节模组3的转动中心轴。
81.具体地,第二关节模组2的转动中心轴与第三关节模组3的转动中心轴重合,第二关节模组2驱动第三关节模组3转动,由于大腿4与第三关节模组3连接,小腿5与大腿4连接,则大腿4和小腿5沿前后方向移动。而小腿5与大腿4转动连接,小腿5的转动中心轴平行于第三关节模组3的转动中心轴,则小腿5可沿上下两个方向移动。
82.在本实用新型实施例的一个较佳实现方式中,如图3-图5所示,所述第三关节模组3通过同步组件41与所述小腿5连接;所述同步组件41包括:
83.主同步带轮411,与所述大腿4转动连接;
84.从同步带轮412,与所述大腿4转动连接,且与所述小腿5连接;
85.同步带413,环绕所述主同步带411和所述从同步带412设置;
86.其中,所述第三关节模组3驱动所述主同步带轮411转动。
87.具体地,大腿4上设置有同步组件41,第三关节模组3与同步组件41连接,且小腿5与同步组件41连接,通过同步组件41使得第三关节模组3驱动小腿5沿上下两个方向移动。主同步带轮411与大腿4转动连接(具体地,主同步带轮411可以通过轴承与大腿4转动连接),第三关节模组3的输出轴与主同步带轮411连接,从而可以驱动主同步带轮411转动。主同步带轮411通过同步带413与从同步带轮412连接,从而主同步带轮411转动时带动从同步带轮412转动。小腿5与从同步带轮412连接,且小腿5与大腿4转动连接,从同步带轮412转动时,带动小腿5绕大腿4转动。
88.在本实用新型实施例的一个较佳实现方式中,如图4-图5所示,所述大腿4上设置有同步带413张紧调节器。
89.具体地,通过同步带413张紧调节器可以调节同步带413的张紧程度,从而确保主同步带轮411转动时,可以带动从同步带轮412转动,实现小腿5沿上下两个方向移动。
90.大腿4上设置有长条孔,同步带413张紧调节器包括:
91.按压件,用于按压同步带413;
92.锁紧件,穿过长条孔并可在长条孔内滑动,且锁紧在大腿4上。
93.锁紧件可以是螺钉,通过锁紧件固定按压件在长条孔中的不同位置,从而调整同步带413的张紧程度。
94.在本实用新型实施例的一个较佳实现方式中,如图3-图4所示,所述第一关节模组1、所述第二关节模组2以及所述第三关节模组3采用相同的结构。
95.具体地,第一关节模组1、第二关节模组2以及第三关节模组3可以采用相同的结构,当然也可以采用不同的结构。本技术中第一关节模组1、第二关节模组2以及第三关节模组3采用相同的结构,简化安装,降低成本。本技术中的关节模组可以采用一级减速关节模组或二级减速关节模组,例如第一关节模组1为一级减速关节模组,或者第一关节模组1为二级减速关节模组,根据需要选择对应的减速关节模组。以下分别对一级减速关节模组和二级减速关节模组进行说明。
96.一级减速关节模组
97.如图6-图8所示,所述一级减速关节模组包括:
98.第一定子法兰11a,具有容纳空间;
99.第一输出法兰12a,位于所述容纳空间内,且与所述第二关节模组2连接;
100.第一穿线管13a,与所述第一输出法兰12a连接;
101.第一减速机14a,所述第一减速机14a套设在所述第一穿线管13a外;
102.第一电机转子15a,与所述第一穿线管13a连接;
103.第一电机定子16a,设置于所述第一定子法兰11a;
104.其中,所述第一电机定子16a围绕所述第一减速机14a设置,所述第一电机转子15a围绕所述第一电机定子16a设置。
105.值得说明的是,本技术采用无框力矩外转子电机,并将减速机嵌到第一电机定子16a内,达到减小驱动关节模组的体积。当然也减小了驱动关节模组的重量,从而减小足式机器人的整体重量,达到提高足式机器人续航能力的效果。
106.无框力矩电机:力矩电机采用的是恒磁阻无刷电机的设计,电机由环形定子和环形转子组成,定子不采用齿形叠片设计,而是由光滑的圆筒形的叠片构成,转子由多极稀土永磁磁极和环形空心轴构成,这种结构的特点是保证拥有较大的气隙,且整个工作气隙内磁阻是均匀的,因此电机具有无磁槽力矩的优点。力矩电机是一种特殊类型的永磁无刷同步电机,由于负载直接连接转子,不需要任何传动件,因此力矩电机属于直接驱动技术。力矩电机也是一种“无框”电机。也就是说电机没有外壳、轴承或测量系统。这些部件由机器制造商根据所需性能选择,或成套购买。与传统电机不同,力矩电机规格主要取决于扭矩,而不是功率。而且,最大扭矩决定了电机可实际产生的扭矩和连续扭矩决定电机能连续提供的扭矩。应用的负荷周期决定对最大扭矩或连续扭矩的依赖程度。
107.可以理解的是,本技术中第一电机定子16a为环形定子,第一电机转子15a为环形转子。第一穿线管13a为中空管,第一穿线管13a可供线路通过。
108.在本实用新型实施例的一个较佳实现方式中,如图4以及图6所示,所述第一定子法兰11a包括:
109.外侧壁;
110.内侧壁,位于所述外侧壁内;
111.连接壁,所述连接壁的两端分别连接所述外侧壁和所述内侧壁。
112.具体地,第一定子法兰11a包括三个部分,外侧壁、内侧壁以及连接壁。连接壁的两端分别连接外侧壁的底部和内侧壁的底部。连接壁呈环形,外侧壁连接在环形的连接壁的外侧,内侧壁连接在环形的连接壁的内测。
113.在本实用新型实施例的一个较佳实现方式中,如图6以及图7所示,所述减速机包括:
114.第一内齿圈141a,设置于所述内侧壁;
115.第一太阳轮142a,套设在所述第一穿线管13a外;
116.第一行星轮143a,与所述第一输出法兰12a转动连接,且所述第一行星轮143a分别与所述第一内齿圈141a、所述第一太阳轮142a啮合。
117.减速机是一种由封闭在刚性壳体内的齿轮传动、蜗杆传动、摆线传动所组成的独立部件,常用作原动件与工作机之间起到减速增扭作用的传动装置,在二者之间起匹配转速和传递转矩的作用,在现代机械中应用极为广泛。
118.具体地,第一内齿圈141a设置在内侧壁的顶部的内侧,为了限制第一内齿圈141a的位移,防止第一内齿圈141a的移动,在内侧壁上设置第一内齿圈141a压盖,通过第一内齿
圈141a压盖和内侧壁夹持第一内齿圈141a。此外,在第一内齿圈141a的外侧设置若干个第一平面结构,在内侧壁上设置有第二平面结构,第一平面结构和第二平面结构采用面面接触,从而限定第一内齿圈141a在周向上的移动。第一太阳轮142a是指位于减速机中心的轮,第一行星轮143a是指围绕在第一太阳轮142a四周的。第一行星轮143a两端分别与第一内齿圈141a、第一太阳轮142a啮合。第一行星轮143a可以有多个,如图7所示,采用3个第一行星轮143a,可以提高减速机的稳定性。
119.减速机的第一内齿圈141a通过过盈配合、涂胶等方式安装在第一定子法兰11a上,同时通过第一内齿圈141a压盖限制减速机第一内齿圈141a的轴向运动,第一内齿圈141a压盖通过螺纹紧固件固定在第一定子法兰11a上。减速机的第一太阳轮142a带动减速机第一行星轮143a在减速机的第一内齿圈141a内部既做绕着第一穿线管13a做自转运动,又绕着减速机第一太阳轮142a做公转运动。
120.第一穿线管13a通过螺纹紧固件固定在第一输出法兰12a上,使得线缆通过中间孔的时候不直接跟高速运转的减速机的第一太阳轮142a接触,而是和低速运转的第一穿线管13a接触,已到减小线缆磨损的效果,同时使用耐磨损的密度小的材料制作第一穿线管13a,第一穿线管13a的外壁和减速机的第一太阳轮142a的内壁应留有空隙,防止第一穿线管13a和减速机第一太阳轮142a之间的摩擦导致磨损。
121.在本实用新型实施例的一个较佳实现方式中,如图6-图8所示,所述第一电机转子15a通过转子输出轴与所述第一穿线管13a连接;所述转子输出轴上设置有通孔,所述第一太阳轮142a位于所述通孔内。
122.具体地,第一电机转子15a通过转子输出轴与第一穿线管13a连接,从而第一电机转子15a转动时,带动转子输出轴、第一穿线管13a以及第一输出法兰12a转动。转子输出轴上设置有通孔,第一太阳轮142a位于通孔内,转子输出轴通过第一太阳轮142a与第一穿线管13a连接。
123.转子输出轴与第一电机转子15a通过螺纹紧固件进行连接,使第一电机转子15a的转动和转矩能够传递到转子输出轴上;转子输出轴与减速机的第一太阳轮142a连接在一起,这样使得第一电机转子15a的转动和转矩能够通过转子输出轴传递到减速机第一太阳轮142a上。
124.在本实用新型实施例的一个较佳实现方式中,所述电驱动关节模组还包括:
125.电机后法兰,位于所述转子输出轴背离所述连接壁的一侧;
126.所述电机后法兰通过输出轴轴承与所述转子输出轴转动连接。
127.具体地,电机后法兰与外侧壁的顶部连接,电机后法兰通过输出轴轴承与转子输出轴转动连接。第一穿线管13a穿过电机后法兰。电机后法兰与转子输出轴之间有转子输出轴轴承,对转子输出轴具有支承和限位的作用。
128.在本实用新型实施例的一个较佳实现方式中,如图7以及图8所示,所述第一输出法兰12a位于所述内侧壁内,所述第一输出法兰12a在所述内侧壁内转动,所述第一输出法兰12a与所述内侧壁通过法兰轴承转动连接。
129.具体地,第一输出法兰12a位于内侧壁内,并可在内侧壁内转动。第一输出法兰12a通过法兰轴承与内侧壁的内侧转动连接。也即是说,第一定子法兰11a和第一输出法兰12a之间具有法兰轴承,对第一输出法兰12a具有支承和限位的作用。法兰轴承有两个,两个法
兰轴承之间设置有输出法兰轴承衬套。两个输出法兰轴承之间具有关节模组输出法兰轴承衬套,对关节模组输出法兰轴承具有支撑和限位的作用。为了限制法兰轴承的位移,在内侧壁的底部设置轴承压盖,通过内侧壁和轴承压盖夹持法兰轴承。
130.在本实用新型实施例的一个较佳实现方式中,如图6、图7以及图8所示,所述第一电机定子16a设置于所述内侧壁外,所述第一电机定子16a和所述外侧壁之间具有间隙,所述第一电机转子15a位于所述间隙内,所述第一电机转子15a在所述间隙内转动。
131.具体地,第一电机定子16a围绕设置在内侧壁外,第一电机定子16a于外侧壁之间具有间隙,第一电机转子15a位于间隙内,并可在间隙内转动。第一电机定子16a通过过盈配合、涂胶等方式固定在第一定子法兰11a上;第一电机转子15a属于外转子,安装在第一电机定子16a的外圈,第一电机转子15a与第一电机定子16a之间有空隙,使得第一电机转子15a可以相对第一电机定子16a自由转动。
132.制动抱闸:制动抱闸在电机得电前是处于抱紧状态,使得电机不能转动,电机得电使能后,制动抱闸松开,这时就可以控制电机转动。制动抱闸的主要作用是机器因故障突然断电时,能使机器停止运作,不因惯性和重力等因素继续运转造成事故。
133.二级减速关节模组
134.如图9-图12所示,所述二级减速关节模组包括:
135.第二定子法兰11b,具有容纳空间;
136.第二穿线管12b,位于所述容纳空间内;
137.一级输出法兰13b和二级输出法兰14b,与所述第二穿线管12b连接;所述二级输出法兰14b与所述第二关节模组2连接;
138.一级减速机15b,套设在所述第二穿线管12b外并与所述一级输出法兰13b连接;
139.二级减速机16b,套设在所述第二穿线管12b外并与所述二级输出法兰14b连接;
140.第二电机转子17b,与所述第二穿线管12b连接;
141.第二电机定子18b,设置于所述第二定子法兰11b;
142.其中,所述第二电机定子18b围绕所述一级减速机15b设置,所述第二电机转子17b围绕所述电机定子设置;所述二级减速机16b位于所述第二电机定子18b外。
143.值得说明的是,本技术采用无框力矩外转子电机,并将一级减速机15b嵌到第二电机定子18b内,达到减小驱动关节模组的体积,同时在电机端面再串联第二级减速机16b,达到增大减速比,从而达到增大模组的力矩输出。当然也减小了驱动关节模组的重量,从而减小足式机器人的整体重量,达到提高足式机器人续航能力的效果。
144.可以理解的是,本技术中第二电机定子18b为环形定子,第二电机转子17b为环形转子。第二穿线管12b为中空管,第二穿线管12b可供线路通过。
145.在本实用新型实施例的一个较佳实现方式中,如图10所示,所述第二定子法兰11b包括:
146.盖体;
147.外侧壁,与所述盖体连接;
148.内侧壁,位于所述外侧壁内;
149.连接壁,所述连接壁的两端分别连接所述外侧壁和所述内侧壁;
150.所述第二电机定子18b设置在所述内侧壁外。
151.具体地,第二定子法兰11b包括四个部分,盖体、外侧壁、内侧壁以及连接壁。连接壁的两端分别连接外侧壁的底部和内侧壁的底部。连接壁呈环形,外侧壁连接在环形的连接壁的外侧,内侧壁连接在环形的连接壁的内测。盖体和外侧壁可拆卸连接,外侧壁分成三段,分别为依次设置的第一段、第二段以及第三段,第一段与盖体连接,第二段与第一段连接,第二段、连接壁以及内侧壁一体设置,第三段与第二段连接。
152.在本实用新型实施例的一个较佳实现方式中,如图10-图11所示,所述一级减速机15b包括:
153.一级内齿圈151b,设置于所述内侧壁;
154.一级太阳轮152b,套设连接在所述第二穿线管12b外;
155.一级行星轮153b,与所述一级输出法兰13b转动连接,且所述一级行星轮153b分别与所述一级内齿圈151b、所述一级太阳轮152b啮合。
156.减速机是一种由封闭在刚性壳体内的齿轮传动、蜗杆传动、摆线传动所组成的独立部件,常用作原动件与工作机之间起到减速增扭作用的传动装置,在二者之间起匹配转速和传递转矩的作用,在现代机械中应用极为广泛。
157.具体地,一级内齿圈151b设置在内侧壁的顶部的内侧,为了限制一级内齿圈151b的位移,防止一级内齿圈151b的移动,在内侧壁上设置一级内齿圈151b压盖,通过一级内齿圈151b压盖和内侧壁夹持一级内齿圈151b。此外,在一级内齿圈151b的外侧设置若干个第一平面结构,在内侧壁上设置有第二平面结构,第一平面结构和第二平面结构采用面面接触,从而限定一级内齿圈151b在周向上的移动。一级太阳轮152b是指位于一级减速机15b中心的轮,一级行星轮153b是指围绕在一级太阳轮152b四周的轮。一级行星轮153b两端分别与一级内齿圈151b、一级太阳轮152b啮合。一级行星轮153b可以有多个,如图10和图11所示,采用3个一级行星轮153b,可以提高一级减速机15b的稳定性。
158.一级减速机15b的一级内齿圈151b通过过盈配合、涂胶等方式安装在第二定子法兰11b上,同时通过一级内齿圈151b压盖限制一级减速机15b一级内齿圈151b的轴向运动,一级内齿圈151b压盖通过螺纹紧固件固定在第二定子法兰11b上。一级减速机15b的一级太阳轮152b带动一级减速机15b的一级行星轮153b在一级减速机15b的一级内齿圈151b内部既做绕着第二穿线管12b做自转运动,又绕着一级减速机15b的一级太阳轮152b做公转运动。
159.第二穿线管12b通过螺纹紧固件固定在二级输出法兰14b上,使得线缆通过中间孔的时候不直接跟高速运转的一级减速机15b的一级太阳轮152b接触,而是和低速运转的第二穿线管12b接触,已到减小线缆磨损的效果,同时使用耐磨损的密度小的材料制作第二穿线管12b,第二穿线管12b的外壁和一级减速机15b的一级太阳轮152b的内壁应留有空隙,防止第二穿线管12b和一级减速机15b一级太阳轮152b之间的摩擦导致磨损。
160.在本实用新型实施例的一个较佳实现方式中,如图12所示,所述第二电机转子17b通过转子输出轴与所述第二穿线管12b连接;所述转子输出轴上设置有通孔,所述一级太阳轮152b位于所述通孔内。
161.具体地,第二电机转子17b通过转子输出轴与第二穿线管12b连接,从而第二电机转子17b转动时,带动转子输出轴、第二穿线管12b以及一级输出法兰13b转动。转子输出轴上设置有通孔,一级太阳轮152b位于通孔内,转子输出轴通过一级太阳轮152b与第二穿线
管12b连接。
162.转子输出轴与第二电机转子17b通过螺纹紧固件进行连接,使第二电机转子17b的转动和转矩能够传递到转子输出轴上;转子输出轴与一级减速机15b的一级太阳轮152b连接在一起,这样使得第二电机转子17b的转动和转矩能够通过转子输出轴传递到一级减速机15b一级太阳轮152b上。
163.在本实用新型实施例的一个较佳实现方式中,如图10以及图12所示,所述一级输出法兰13b位于所述内侧壁内,所述一级输出法兰13b在所述内侧壁内转动,所述一级输出法兰13b与所述内侧壁通过一级法兰轴承转动连接。
164.具体地,一级输出法兰13b位于内侧壁内,并可在内侧壁内转动。一级输出法兰13b通过一级法兰轴承与内侧壁的内侧转动连接。也即是说,第二定子法兰11b和一级输出法兰13b之间具有一级法兰轴承,对一级输出法兰13b具有支承和限位的作用。一级法兰轴承有两个,两个一级法兰轴承之间设置有一级输出法兰13b轴承衬套。两个一级法兰轴承之间具有关节模组一级输出法兰13b轴承衬套,对关节模组一级输出法兰13b轴承具有支撑和限位的作用。为了限制一级法兰轴承的位移,在内侧壁的底部设置轴承压盖,通过内侧壁和轴承压盖夹持一级法兰轴承。
165.在本实用新型实施例的一个较佳实现方式中,如图10、图11以及图12所示,所述第二电机定子18b设置于所述内侧壁外,所述第二电机定子18b和所述外侧壁之间具有间隙,所述第二电机转子17b位于所述间隙内,所述第二电机转子17b在所述间隙内转动。
166.具体地,第二电机定子18b围绕设置在内侧壁外,第二电机定子18b于外侧壁之间具有间隙,第二电机转子17b位于间隙内,并可在间隙内转动。第二电机定子18b通过过盈配合、涂胶等方式固定在第二定子法兰11b上;第二电机转子17b属于外转子,安装在第二电机定子18b的外圈,第二电机转子17b与第二电机定子18b之间有空隙,使得第二电机转子17b可以相对第二电机定子18b自由转动。
167.在本实用新型实施例的一个较佳实现方式中,如图10、图11以及图12所示,所述二级输出法兰14b位于所述外侧壁内,所述二级输出法兰14b在所述外侧壁内转动,所述二级输出法兰14b与外侧壁通过二级法兰轴承转动连接。
168.具体地,二级输出法兰14b位于外侧壁(具体位于第三段)内,并可在外侧壁内转动。二级输出法兰14b通过交叉滚子轴承与外侧壁的内侧转动连接。也即是说,第二定子法兰11b和二级输出法兰14b之间具有交叉滚子轴承,对二级输出法兰14b具有支承和限位的作用。交叉滚子轴承上侧设置有交叉滚子轴承衬套,下侧设置有轴用弹性挡圈,对交叉滚子轴承具有支撑和限位的作用。为了限制交叉滚子轴承的位移。
169.在本实用新型实施例的一个较佳实现方式中,如图10以及图11所示,所述二级减速机16b包括:
170.二级内齿圈161b,设置于所述外侧壁;
171.二级太阳轮162b,套设在所述穿线管外;
172.二级行星轮163b,与所述二级输出法兰14b转动连接,且所述二级行星轮163b分别与所述二级内齿圈161b、所述二级太阳轮162b啮合。
173.具体地,二级内齿圈161b设置在外侧壁的内侧(具体设置在第二段的内侧),为了限制二级内齿圈161b的位移,防止二级内齿圈161b的移动,在二级内齿圈161b的下侧被交
叉滚子轴承衬套限位,通过交叉滚子轴承衬套和外侧壁夹持二级内齿圈161b。此外,在二级内齿圈161b的外侧设置若干个第三平面结构,在外侧壁上设置有第四平面结构,第三平面结构和第四平面结构采用面面接触,从而限定二级内齿圈161b在周向上的移动。二级太阳轮162b是指位于二级减速机16b中心的轮,二级行星轮163b是指围绕在二级太阳轮162b四周的轮。二级行星轮163b两端分别与二级内齿圈161b、二级太阳轮162b啮合。二级行星轮163b可以有多个,如图11所示,采用3个二级行星轮163b,可以提高二级减速机16b的稳定性。
174.二级太阳轮162b与一级输出法兰13b卡接,也就是说,一级输出法兰13b转动时,可以带动二级太阳轮162b转动。
175.二级减速机16b的二级内齿圈161b通过过盈配合、涂胶等方式安装在第二定子法兰11b上,同时通过交叉滚子轴承衬套限制二级减速机16b的二级内齿圈161b的轴向运动,交叉滚子轴承衬套通过螺纹紧固件固定在第二定子法兰11b上。二级减速机16b的二级太阳轮162b带动二级减速机16b的二级行星轮163b在二级减速机16b的二级内齿圈161b内部既做绕着第二穿线管12b做自转运动,又绕着二级减速机16b的二级太阳轮162b做公转运动。
176.在本实用新型实施例的一个较佳实现方式中,如图3-图4所示,所述第一关节模组1通过第一连接件11与所述第二关节模组2连接,所述第一连接件11上设置有第一轴承12。
177.具体地,第一连接件11两端分别连接第一关节模组1和第二关节模组2,第一关节模组1的输出轴(即第一输出法兰12a或二级输出法兰14b)。第一轴承12位于第一连接件11与第一关节模组1的输出轴的连接处,从而第一轴承12对第一连接件11起到支承和限位的作用,避免机械腿在工作过程中受到的力直接作用到第二关节模组2,从而延长了第二关节模组2的寿命。
178.第一连接件11通过螺纹紧固件与第一关节模组1的输出轴连接,第一关节模组1的转动和转矩能传递到第一连接件11,从而带动第二关节模组2、第三关节模组3、大腿4、小腿5一起绕第一关节模组1的输出轴做圆周运动。
179.在本实用新型实施例的一个较佳实现方式中,如图3-图4所示,所述第二关节模组2通过第二连接件21与所述第三关节模组3连接,所述第二连接件21上设置有第二轴承22。
180.具体地,第二连接件21两端分别连接第二关节模组2和第三关节模组3,第二关节模组2的输出轴(即第一输出法兰12a或二级输出法兰14b)。第二轴承22位于第二连接件21与第三关节模组3的输出轴的连接处,从而第二轴承22对第二连接件21起到支承和限位的作用,避免机械腿在工作过程中受到的力直接作用到第三关节模组3,从而延长了第三关节模组3的寿命。
181.第二连接件21通过螺纹紧固件与第二关节模组2的输出轴连接,第二关节模组2的转动和转矩能传递到第二连接件21,从而带动第三关节模组3、大腿4、小腿5一起绕第二关节模组2的输出轴做圆周运动。
182.在本实用新型实施例的一个较佳实现方式中,如图3-图4所示,所述小腿5的底端设置有足垫51,所述足垫上设置有力传感器,所述力传感器能够感知机械腿走路触地时的受力情况,并将此受力信号发给控制器130,控制器130据此做出决策控制机器人进行对应的动作。
183.具体地,小腿5底部安装有足垫51,例如,脚底缓冲垫,足垫51具有弹性,阻尼大,密
度小的特点,以减小机械腿在工作过程中地面的冲击力。
184.在一些实施方式中,如图1-图2所示,所述顶板的四个端点设置有吊环180,用于将仿生四足机器人吊起来进行离地调试。
185.应当理解的是,本实用新型的应用不限于上述的举例,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,所有这些改进和变换都应属于本实用新型所附权利要求的保护范围。