1.本实用新型涉及航空设备制造领域,具体涉及一种高压电动飞机旅客登机梯靠机行驶速度控制系统。
背景技术:
2.飞机旅客登机梯在靠机作业时,为保证靠机的安全性,必须将车辆行驶速度降低,缓慢靠近飞机,但由于驾驶员驾驶车辆的能力有所差异,控制行驶速度的把控性不一,一旦操作不当,会造成车辆与飞机舱门相碰,造成碰撞事故。
3.如何在一定距离内,将车辆速度控制在一定范围内,是靠机行驶安全的首要保证,所以光靠人为控制靠机的速度行驶,是不能确保安全性的。
技术实现要素:
4.为了克服现有技术的上述缺陷,本实用新型的目的在于提供一种高压电动飞机旅客登机梯靠机行驶速度控制系统。
5.为了实现本实用新型的目的,所采用技术方案是:
6.一种高压电动飞机旅客登机梯靠机行驶速度控制系统,包括:
7.车辆控制器,测距机构通过电信号输送管路与所述车辆控制器相连;
8.所述车辆控制器的输出端与蜗速继电器相连,通过车辆控制器输出24v电信号给蜗速继电器使得蜗速继电器继续工作;
9.所述蜗速继电器的输出端与驱动控制器相连,通过所述驱动控制器对电机的转速进行限制,从而让车辆达到蜗速行驶速度的上限,驾驶员再踩加速器,此时行驶速度在蜗速行驶速度的浮动范围内浮动,当靠机过程完成后,车辆后退行驶,达到车辆与飞机舱门2米距离以外,车辆将自动按照正常行驶速度行驶。
10.在本实用新型的一个优选实施例中,所述车辆控制器还连接有远距离指示灯和警示灯,当车辆与飞机舱门间距在2米以内时,指示灯和警示灯将亮起,提醒驾驶员和车外操作人员注意。
11.在本实用新型的一个优选实施例中,所述正常行驶速度为最高时速在25公里/小时。
12.在本实用新型的一个优选实施例中,所述蜗速行驶速度的上限为3公里/小时。
13.在本实用新型的一个优选实施例中,所述蜗速行驶速度的浮动范围为1公里-3公里/小时之间,优选1-2公里/小时。
14.在本实用新型的一个优选实施例中,所述后退行驶的速度为最高8公里/小时。
15.在本实用新型的一个优选实施例中,所述测距机构为安装在平台防撞条中间段的2米和0.8米测距用光电开关。
16.本实用新型的有益效果在于:
17.通过驱动控制器的驱动控制,能有效达到设定的靠机速度,从而确保了靠机安全
性。
附图说明
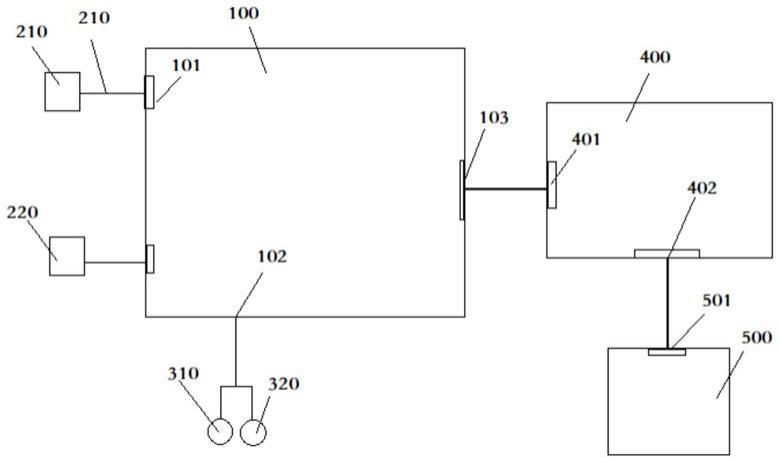
18.图1为本实用新型的结构示意图。
具体实施方式
19.如图1所示的高压电动飞机旅客登机梯靠机行驶速度控制系统,包括了车辆控制器100,测距机构200通过电信号输送管路210与车辆控制器100的输入端101相连,测距机构200为安装在平台防撞条中间段的2米和0.8米测距用光电开关210和220。
20.车辆控制器100的输出端102还连接有远距离指示灯310和警示灯320,当车辆与飞机舱门间距在2米以内时,指示灯和警示灯将亮起,提醒驾驶员和车外操作人员注意。
21.车辆控制器100的输出端103与蜗速继电器400的输入端401相连,通过车辆控制器100输出24v电信号给蜗速继电器400使得蜗速继电器400继续工作;
22.蜗速继电器400的输出端402与驱动控制器500的输入端501相连,通过驱动控制器500对电机(图中未示出)的转速进行限制,从而让车辆达到蜗速行驶速度的上限,蜗速行驶速度的上限为3公里/小时。
23.驾驶员再踩加速器,此时行驶速度在蜗速行驶速度的浮动范围内浮动,蜗速行驶速度的浮动范围为1公里-3公里/小时之间,优选1-2公里/小时。当靠机过程完成后,车辆后退行驶,后退行驶的速度为最高8公里/小时。
24.达到车辆与飞机舱门2米距离以外,车辆将自动按照正常行驶速度行驶。正常行驶速度为最高时速在25公里/小时。
25.车辆控制器100的参数为工作温度在摄氏-45度至85度;防护等级:ip67;工作电压:8v至32v;ce认证:符合2004/108/ec;电磁兼容性:iso13766,高达200v/m,20mhz-1ghz;加载冲击:iso7637-2,173v,20hm;震动,冲击和碰撞:iec60068-2-29,-64,-27,-32;输出接口单点负载电流:2.5a,可直接带动电池阀进行工作。
26.驱动控制器500的技术参数如下:额定功率:45kw;额定输出电流:160a;峰值输出电流:320a;额定条件驱动器效率:≥98%;输入电压范围:200v(欠压点)-450v(过压点);输出频率范围:0~1000hz;冷却方式:水冷型(额定流量:16l/min);速度控制范围:1:1000;速度控制精度:
±
0.02%;起动转矩:0hz,200%,;转矩响应时间:<5ms;转矩控制精度:
±
5%。
27.光电开关210和220的技术参数如下:工作电压:10v-30vdc;测距感应最大距离:0.1m至2m;工作最大电流:200ma;工作类型:pnp型;防护等级:ip67。
技术特征:
1.一种高压电动飞机旅客登机梯靠机行驶速度控制系统,其特征在于,包括:车辆控制器,测距机构通过电信号输送管路与所述车辆控制器相连;所述车辆控制器的输出端与蜗速继电器相连,通过车辆控制器输出24v电信号给蜗速继电器使得蜗速继电器继续工作;所述蜗速继电器的输出端与驱动控制器相连,通过所述驱动控制器对电机的转速进行限制,从而让车辆达到蜗速行驶速度的上限,驾驶员再踩加速器,此时行驶速度在蜗速行驶速度的浮动范围内浮动,当靠机过程完成后,车辆后退行驶,达到车辆与飞机舱门2米距离以外,车辆将自动按照正常行驶速度行驶。2.如权利要求1所述的一种高压电动飞机旅客登机梯靠机行驶速度控制系统,其特征在于,所述车辆控制器还连接有远距离指示灯和警示灯,当车辆与飞机舱门间距在2米以内时,指示灯和警示灯将亮起,提醒驾驶员和车外操作人员注意。3.如权利要求1所述的一种高压电动飞机旅客登机梯靠机行驶速度控制系统,其特征在于,所述正常行驶速度为最高时速在25公里/小时。4.如权利要求1所述的一种高压电动飞机旅客登机梯靠机行驶速度控制系统,其特征在于,所述蜗速行驶速度的上限为3公里/小时。5.如权利要求1所述的一种高压电动飞机旅客登机梯靠机行驶速度控制系统,其特征在于,所述蜗速行驶速度的浮动范围为1公里-3公里/小时之间。6.如权利要求1所述的一种高压电动飞机旅客登机梯靠机行驶速度控制系统,其特征在于,所述后退行驶的速度为最高8公里/小时。7.如权利要求1所述的一种高压电动飞机旅客登机梯靠机行驶速度控制系统,其特征在于,所述测距机构为安装在平台防撞条中间段的2米和0.8米测距用光电开关。
技术总结
本实用新型公开了一种高压电动飞机旅客登机梯靠机行驶速度控制系统,其特征在于,包括:车辆控制器,测距机构通过电信号输送管路与所述车辆控制器相连;所述车辆控制器的输出端与蜗速继电器相连,通过车辆控制器输出24V电信号给蜗速继电器使得蜗速继电器继续工作;所述蜗速继电器的输出端与驱动控制器相连,通过所述驱动控制器对电机的转速进行限制,从而让车辆达到蜗速行驶速度的上限,驾驶员再踩加速器,此时行驶速度在蜗速行驶速度的浮动范围内浮动,当靠机过程完成后,车辆后退行驶,达到车辆与飞机舱门2米距离以外,车辆将自动按照正常行驶速度行驶。正常行驶速度行驶。正常行驶速度行驶。
技术研发人员:张青军 戴崇一
受保护的技术使用者:上海航福机场设备有限公司
技术研发日:2021.03.16
技术公布日:2022/2/8