1.本实用新型涉及一种轨道平顺度激光检测装置,属于轨道测量仪器技术领域。
背景技术:
2.目前检测铁路路轨的直线性,主要采用的技术方案是:由激光发射器、定位接收靶、测量靶及图像无线接收装置组成,定位接收光靶内安装有摄像装置及图像发射装置。上述检测方案存在如下问题:
3.1、图像传输到手持终端后,依旧要依靠人眼判读,受人为因素影响大,测量数据主观性大,精度较低;2、测量靶没有滑轮装置,在测量过程中需要拿起仪器到不同测点,降低工作效率,工作强度大;3、不能进行曲线段的测量;4、没有超高修正;5、没有首尾两点高程差的测量。随着火车的不断提速,对路轨的直线性和弦高的要求大幅提高,原先传统的检测方法已经不能满足要求。
技术实现要素:
4.为解决现有技术存在的缺陷,本实用新型的目的是提供一种提高测量精度和效率、降低工作强度的激光长弦轨道平顺度检测装置。
5.本实用新型的技术方案是:一种激光长弦轨道平顺度检测装置,包括横梁,以及位于横梁两端的辅助轮和行走轮,所述辅助轮转动连接辅助纵梁,所述横梁一端活动插接辅助纵梁,调整轮螺纹连接辅助纵梁,调整轮底部转动连接横梁,横梁另一端固定有安装纵梁,行走轮与所述安装纵梁转动连接,安装纵梁底部设有水平检测轮,横梁上设有移动平台,移动平台上设有数字接收靶和检测靶,数字接收靶与控制元件箱中的工控机相连,所述控制元件箱中还设有倾角传感器,所述倾角传感器分别与工控机和水平检测轮相连,工控机无线连接终端设备,标准靶和激光发生装置分居横梁两侧,推杆与横梁相连,辅助纵梁上设有压簧支撑装置。
6.所述横梁上设有水泡式水平测量仪a,所述横梁为铝合金横梁。
7.所述推杆上设有把手,所述移动平台通过步进电机驱动或手动驱动或伺服电机驱动。
8.所述压簧支撑装置包括,固定在辅助纵梁上的箱体连接端,箱体连接端通过法兰与箱本体固定,箱本体端部固定有后压板,轴依次贯穿法兰、箱体连接端和后压板,箱本体内的压簧位于轴外周上,所述压簧两端分别固定在轴和后压板上,轴端部垂直连接侧连板,侧连板底部通过轮轴连接轴承。
9.所述推杆端部通过磁座连接轴与磁座连接板转动连接,磁力座连接磁座连接板,磁座连接板滑动连接固定在横梁上的磁座滑板。
10.所述激光发生装置为带有空间位相调制器的激光经纬仪,所述激光经纬仪的底座a上设有固定卡具a,所述底座a上设有水准器,所述底座a通过调节手轮与固定卡具a相连。
11.所述数字接收靶和检测靶均与移动平台转动连接,移动平台上设有水泡式水平测
量仪b。
12.所述倾角传感器为xt-3000t全温补高频响应高精度双轴数字输出型倾角仪,所述工控机为工控台式电脑。
13.所述检测靶表面设有检测坐标。
14.所述标准靶靶面上有分划线,标准靶转动连接固定卡具b,固定卡具b上设有水准器。
15.本实用新型的有益效果是:测量靶采用了大面元激光位移传感器,实现了激光中心位置的自动采集以及对采集数据的分析、优化,解决了人眼判读以及测量精度不足的问题;测量靶加装了行走装置解决了工人作业强度的问题,使测量更加简便、快捷;加装了矢距的自动化测量手段,解决了轨道曲线段平顺度的测量问题;采用了高精度的倾角传感器实现了两轨间的水平差(超高)的数字化测量,解决了超高对轨向和高低测量结果的影响的问题;实现了轨道测量中的首尾两点的高程差的测量。
附图说明
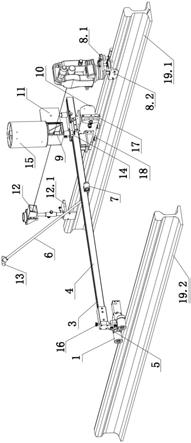
16.图1为本实用新型的工作视图;
17.图2为压簧支撑箱的结构视图;
18.图3为推杆与磁力座的连接视图。
19.图中附图标记如下:1、辅助轮,2.1、箱体连接端,2.2、箱本体,2.3、法兰,2.4、后压板,2.5、侧连板,2.6、轴,2.7、压簧,2.8、轮轴,2.9、轴承,3、水泡式水平测量仪,4、横梁,5、辅助纵梁,6、推杆,7.1、磁座连接轴,7.2、磁力座,7.3、磁座滑板,7.4、磁座连接板,8、激光发生装置,8.1、底座a,8.2、固定卡具a,9、数字接收靶,10、行走轮,11、检测靶,12、标准靶,12.1、固定卡具b,13、把手,14、移动平台,15、控制元件箱,16、调整轮,17、安装纵梁,18、水平检测轮,19.1、路轨a,19.2、路轨b。
具体实施方式
20.下面结合附图1-3对本实用新型做进一步说明:
21.一种激光长弦轨道平顺度检测装置,包括横梁4,以及位于横梁4两端的辅助轮1和行走轮10,所述横梁4为铝合金横梁,横梁4上设有水泡式水平测量仪a3,所述辅助轮1转动连接辅助纵梁5,所述横梁4一端活动插接辅助纵梁5,调整轮16螺纹连接辅助纵梁5,调整轮16底部转动连接横梁4,横梁4另一端固定有安装纵梁17,行走轮10与所述安装纵梁17转动连接,安装纵梁17底部设有水平检测轮18,横梁4上设有通过步进电机驱动的移动平台14,移动平台14上设有数字接收靶9和检测靶11,所述数字接收靶9和检测靶11均与移动平台14转动连接,移动平台14上设有水泡式水平测量仪b,数字接收靶9前端有滤光片,所述滤光片尾窄带滤光片,组织背景光通过,只允许激光光束一个小范围波长的激光通过,靶面材料采用透明或半透明,检测靶11表面设有检测坐标,数字接收靶9与控制元件箱15中的工控机相连,所述控制元件箱15中还设有倾角传感器,所述倾角传感器分别与工控机和水平检测轮18相连,工控机无线连接终端设备,标准靶12和激光发生装置8分居横梁4两侧,所述标准靶12靶面上有分划线,标准靶12转动连接固定卡具b12.1,固定卡具b12.1上设有水准器,所述激光发生装置8为带有空间位相调制器的激光经纬仪,其由底座、调整系统、操作系统、显示
系统、外壳以及把手组成,与纵向旋转轴垂直安装有激光发射体,激光发射体外壳内安装有空间位相调制器,在空间位相调制器靠近透镜组一端固定有激光器,并且激光线轴与水平旋转轴、纵向旋转轴三轴线共点,所述激光经纬仪的底座a8.1上设有固定卡具a8.2,所述底座a8.1上设有水准器,所述底座a8.1通过调节手轮与固定卡具a8.2相连,推杆6与横梁4相连,推杆6上设有把手13,辅助纵梁5上设有压簧支撑装置。所述压簧支撑装置包括,固定在辅助纵梁5上的箱体连接端2.1,箱体连接端2.1通过法兰2.3与箱本体2.2固定,箱本体2.2端部固定有后压板2.4,轴2.6依次贯穿法兰2.3、箱体连接端2.1和后压板2.4,箱本体2.2内的压簧2.7位于轴2.6外周上,所述压簧2.7两端分别固定在轴2.6和后压板2.4上,轴2.6端部垂直连接侧连板2.5,侧连板2.5底部通过轮轴2.8连接轴承2.9。所述推杆6端部通过磁座连接轴7.1与磁座连接板7.4转动连接,磁力座7.2连接磁座连接板7.4,磁座连接板7.4滑动连接固定在横梁4上的磁座滑板7.3。
22.所述工控机为工控台式电脑。所述倾角传感器为xt-3000t全温补高频响应高精度双轴数字输出型倾角仪。
23.激光发生装置的具体结构在公开号cn101178303b的专利文本中已公开,即该专利对激光发射器的具体描述,在此不再赘述。
24.检测前,先将激光发生装置8通过固定卡具a8.2固定到路轨a19.1内侧面上方,然后利用调平手轮调平;再将标准靶12通过固定卡具b12.1固定到路轨a19.1内侧面上方并调平,标准靶12与激光发生装置8间距100米,激光发生装置8的激光打到标准靶12的中心。将横梁4一端的辅助轮1放到路轨b19.2上,行走轮10放置到路轨a19.1上,水平检测轮18贴合路轨a19.1内侧表面,轴承2.9在压簧2.7作用下贴合路轨a19.1内侧表面,从而使横梁4沿路轨移动不会发生横向串动,轴承2.9与路轨b19.2之间柔性贴合,当路轨间距出现变化,会使轴承2.9相对于箱体1横向移动,在压簧2.7作用下,使轴承2.9与路轨b19.2内侧面保持紧密贴合,同时避免了刚性损坏。调整推杆6相对于横梁4的位置,使横梁4两端所受推力均匀,移动顺畅,推杆6位置确定好后,转动磁力座7.2上的开关,通过磁力吸合使推杆6位置固定。通过调整轮16的调整,调平横梁4。
25.检测时,数字接收靶9位于激光发生装置8和标准靶12之间,并固定在第一测点,数字接收靶9接收采集光斑,并通过工控机解算光斑的中心像素坐标,此光斑坐标与仪器出厂前标定的基准坐标做差值,并根据测量靶的比率和倾角参数经过坐标变换得出此测点坐标的线值。再利用倾角传感器测得的角度值对测点的线值进行高程差修正,进而得到此测点的轨向和高低与基准线的实际差值。然后逐点进行测量,一般每隔5米采样一次,最后通过软件计算出所有测点的轨向和高低。
26.检测靶11用于实时人工检测。先将检测靶11中心移动至激光光路上,随着横梁4的移动,若存在偏移,光斑在检测靶11上的位置会发生变化,通过人工读取检测坐标值,估算误差,配合检修。
27.以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型技术原理的前提下,还可以做出若干改进和变型,这些改进和变型也应视为本实用新型的保护范围。