1.本技术涉及铁路装备技术领域,更具体地说,涉及一种磁浮列车的测速定位系统。
背景技术:
2.现有的磁浮列车测速定位系统利用接近开关传感器对轨枕进行计数的方式实现测速和定位,当磁浮列车低速运行、如以10km/h以下速度运行时,接近开关传感器的工作稳定性较差,输出信号不可靠,从而导致无法准确实现测速和定位。
技术实现要素:
3.有鉴于此,本技术提供一种磁浮列车的测速定位系统,用于对磁浮列车的车速和位置进行准确测量。
4.为了实现上述目的,现提出的方案如下:
5.一种磁浮列车的测速定位系统,所述测速定位系统包括定位编码器和测速定位标志板,其中:
6.所述测速定位标志板设置在供磁浮列车运行的轨道上,包括测速齿条和至少一条定位齿条,所述测速齿条与所述定位齿条并行设置;
7.所述定位编码器设置在位于安装在所述磁浮列车的转向架上的支撑滑撬上,用于基于对测速齿条和所述定位齿条的电磁感应产生并向所述磁浮列车的列控系统输出测速脉冲信号和定位脉冲信号,以使所述列控系统根据所述测速脉冲信号和所述定位脉冲信号计算所述磁浮列车的车速和位置。
8.可选的,所述定位编码器包括一个或多个涡流传感器。
9.可选的,所述定位编码器包括沿所述磁浮列车的前后延伸方向设置的4个所述涡流传感器。
10.可选的,所述测速齿条上均匀设置有测速标志板。
11.可选的,所述定位齿条为第一定位齿条和第二定位齿条,所述第一定位齿条的部分定位标志板与所述第二定位齿条的部分定位标志板交错设置。
12.从上述的技术方案可以看出,本技术公开了一种磁浮列车的测速定位系统,包括定位编码器和测速定位标志板。测速定位标志板设置在供磁浮列车运行的轨道上,包括测速齿槽和至少一条定位齿槽;定位编码器设置在位于安装在磁浮列车的转向架上的支撑滑撬上,用于基于对测速齿槽和定位齿槽的电磁感应产生并向磁浮列车的列控系统输出测速脉冲信号和定位脉冲信号,以使列控系统根据测速脉冲信号和定位脉冲信号计算磁浮列车的车速和位置。通过上述方案能够实现对磁浮列车的车速和位置的准确测量。
附图说明
13.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本
申请的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
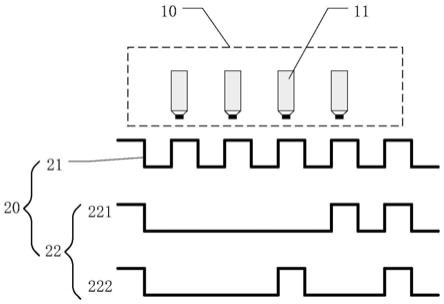
14.图1为本技术实施例的一种磁浮列车的测速定位系统的示意图。
具体实施方式
15.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
16.实施例
17.图1为本技术实施例的一种磁浮列车的测速定位系统的示意图。
18.如图1所示,本实施例的测速定位系统包括定位编码器10和测速定位标志板20。其中定位编码器设置在磁浮列车的支撑滑撬上,该支撑滑撬设置于磁浮列车的转向架上,具体来说为转向架的一部分。该定位编码器包括至少一个涡流传感器11,涡流传感器也可以为多个,本技术以4个涡流传感器为例,这4个涡流传感器按列车的前后延伸方向设置在上述支撑滑撬上。
19.涡流传感器是一种检测金属距离的传感器,可以实时检测出涡流传感器探头面到金属面的距离。当涡流传感器检测到标志位的检测面时,输出检测距离l1;当涡流传感器检测到非标志位的检测面时,输出检测距离l2。
20.该测速标志板包括一条测速齿条21和至少一条定位齿条22,当定位齿条为两条时,分别为第一定位齿条221和第二定位齿条222。测速齿条上均匀设置有用于感应测速标志的测速标志板,即该测速齿条的凸起部分。定位齿条上不均匀设置有多个定位标志板,即该定位齿条上的凸起部分。
21.在磁浮列车运行期间,定位编码器基于电磁感应通过对测速齿条和定位齿条的感应产生测速脉冲信号和定位脉冲信号。该定位编码器的信号输出端还与磁浮列车的列控系统连接,列控系统会根据测速脉冲信号进行计算得到磁浮列车的车速,列控系统还可以根据对定位脉冲信号的计算得到磁浮列车的位置。
22.列控系统的测速原理:
23.当速磁浮列车中低速运行时,涡流传感器不断地采集测速标志板的变化信息,输出信号也为0101地变化状态。假设一个标志位或者非标志位的距离为s,涡流传感器从0到1的变化时间为t,则可以计算出列车运行速度v=s/t。多个涡流传感器采集出不同的速度v值经过冗余处理,过滤掉干扰信号,便可得出真实速度信息。
24.磁浮列车的相对定位原理:
25.当磁浮列车中低速运行时,涡流传感器不断地采集定位标志板的变化信息,输出信号也为0101地变化状态。假设一个标志位或者非标志位的距离为a,涡流传感器从1到0再到1时计数1次,列车运行距离s后,涡流传感器计数值为n,则可以计算出列车运行距离s=2na。多个涡流传感器采集出不同的距离s值经过冗余处理,过滤掉干扰信号,便可得出真实距离信息。
26.磁浮列车的绝对定位原理:
27.假设定位编码器由4个涡流传感器组成,相邻两个涡流传感器间距等于一个标志位和非标志位的间距。当中低速磁浮列车运行在测速标志板位置时,定位编码器读码只有0000和1111两种状态;当中低速磁浮列车运行从左至右经过定位标志板位置1时,定位编码器读码变化为1110、0000、1100、0000、1000、0000、0001、0000、0011、0000、0111,处理后可得到定位标志板位置1的定位编码0001;中低速磁浮列车运行从左至右经过定位标志板位置2时,定位编码器可读码0010。
28.从上述技术方案可以看出,本实施例提供了一种磁浮列车的测速定位系统,包括定位编码器和测速定位标志板。测速定位标志板设置在供磁浮列车运行的轨道上,包括测速齿槽和至少一条定位齿槽;定位编码器设置在位于安装在磁浮列车的转向架上的支撑滑撬上,用于基于对测速齿槽和定位齿槽的电磁感应产生并向磁浮列车的列控系统输出测速脉冲信号和定位脉冲信号,以使列控系统根据测速脉冲信号和定位脉冲信号计算磁浮列车的车速和位置。通过上述方案能够实现对磁浮列车的车速和位置的准确测量。
29.本说明书中的各个实施例均采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似的部分互相参见即可。
30.尽管已描述了本技术实施例的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例做出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本技术实施例范围的所有变更和修改。
31.最后,还需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者终端设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者终端设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者终端设备中还存在另外的相同要素。
32.以上对本技术所提供的技术方案进行了详细介绍,本文中应用了具体个例对本技术的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本技术的方法及其核心思想;同时,对于本领域的一般技术人员,依据本技术的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本技术的限制。