1.本发明属于城市轨道交通领域,涉及轨道巡检系统的传感器信息同步,特别涉及基于双垂向加速度计辅助的轨道巡检系统时空同步装置。
背景技术:
2.近年来,城市轨道交通发展迅速,城市地铁、有轨电车、城际铁路等交通工具在各地都得到了大力建设,极大地提高了人员的出行便利性。随着轨道交通线路建设的增多以及线路运输任务量的增大,对于轨道健康状态的监控成为了轨道建设部门、线路运营单位十分关注的问题。随着运营时间的增长,轨道会逐渐老化,出现平顺性超差、轨距改变、扣件损坏甚至钢轨断裂的问题,极大影响轨道线路运行的安全性。
3.为了保障轨道交通线路运行的可靠、安全性,需要定期对轨道健康状态进行监控。以往的轨道巡检往往依赖于人工作业巡检方式,该方式效率较低。近年来,巡检小车、巡检机器人、随车检测系统得到了大力研发,很大程度上解决了过去人工作业巡检效率低下的问题。特别是随车检测系统,鉴于其无需专门的巡检时间段,具有运行与检测合一的特点,目前在线路运营部门广受青睐。巡检系统上搭载了很多传感器,例如线阵相机、激光相机、轨距测量仪等等,通过对这些传感器测量信息的分析处理可以掌握沿线轨道的状态信息。为了将检测、测量信息与轨道沿线位置点相对应,需要完成测量信息与沿线轨道位置点的同步,以便分析各位置点的轨道状态,通常包括两方面的同步:一是各传感器之间的时间同步,二是传感器采样点与位置点的空间同步。目前通常的解决方案是利用巡检系统上的里程计采样脉冲信号同时触发各传感器,完成传感器之间的时间同步及传感器采样点与沿线轨道位置点的同步标记。然而,这种工作方式仅适用于专门的巡检系统,对于随车测量系统而言并不适用,主要原因在于,轨道运营部门不允许在运行车辆的车轮上加装里程计,并且即使允许在车轮上加装里程计,也还存在采样点与沿线轨道位置点(三维位置坐标)不能很好对应的问题(主要原因在于里程计推算位置只是简单的一维位置推算,当线路是曲线时,位置推算存在误差,难以达到毫米级分辨率)。
4.因此,基于随车测量系统现有的传感器配置,通过陀螺组件、加速度计组件测量信息完成列车速度的解算,并在列车通过相邻轨道连接点时,通过固定安装的两只垂向加速度计分别对轨道连接点进行振动检测,并记录两只垂向加速度计通过轨道连接点的时间差,以此求解得到列车的运行速度,进一步以此速度作为观测值对解算得到的速度值进行融合校正,实现高频、高精度的列车速度估计,并将估计的列车速度折算成等效触发脉冲,利用触发脉冲对列车搭载的传感器进行同步触发采样,以实现时间同步;进一步,利用高精度的位置估计值实现列车准确位置点与传感器采样点的精准对应。本发明将有效解决轨道巡检系统的同步问题,实现时间、空间的精准同步,并且不需要与列车进行信号交互。
技术实现要素:
5.本发明要解决的技术问题就在于:如何解决轨道巡检系统上搭载的多传感器的时
间同步问题,并将传感器采样点与轨道位置点精准对应,提高随车测量系统的工作效率,并且不需要与列车进行信号交互。
6.为解决上述技术问题,本发明提出的解决方案为:
7.基于双垂向加速度计辅助的轨道巡检系统时空同步装置,所述装置由电源模块、陀螺组件、加速度计组件、隔离模块、数据接收模块、故障检测模块、数据平滑模块、通信模块、标定补偿模块、重力敏感性误差补偿模块、温度补偿模块、时间基准记录模块、姿态处理模块、速度处理模块、参考速度计算模块、数据融合模块、位置装订模块、频率计算模块、分频模块、高精度时钟模块、时间同步模块、传感器信息采集模块、空间同步模块、标校模块及中央控制单元组成;
8.所述电源模块包括一次电源模块、二次电源模块及电源管理模块;
9.所述一次电源模块,用于完成24v dc向5v dc的转换,并为二次电源模块提供输入,一次电源模块分别为陀螺组件、加速度计组件、隔离模块、数据接收模块、分频模块、高精度时钟模块、时间同步模块、传感器信息采集模块、空间同步模块、标校模块及中央控制单元供电;
10.所述二次电源模块,用于完成5v dc向3.3v dc的转换,并为故障检测模块、数据平滑模块、通信模块、标定补偿模块、重力敏感性误差补偿模块、温度补偿模块、姿态处理模块、速度处理模块、参考速度计算模块、数据融合模块、位置装订模块、频率计算模块供电;
11.所述电源管理模块,用于接收中央控制单元发送的电控指令,以控制一次电源模块、二次电源模块的供电、断电;
12.所述陀螺组件由三轴陀螺组成,安装方式采用正交安装,安装方向与列车前进方向平行;
13.所述陀螺组件用于采集列车运动过程中的姿态测量信息,输出方式为角增量信息,并将姿态测量信息发送至隔离模块;
14.所述加速度计组件由四轴加速度计组成,分别为两只水平加速度计、两只垂向加速度计,两只水平加速度计与一只垂向加速度计组成三轴加速度计组件,三轴加速度计组件的安装方式采用正交安装,安装方向与列车前进方向平行,另外一只垂向加速度计在垂直方向安装,相距三轴加速度计组件的距离为固定值l,并且三轴加速度计组件位于单只垂向加速度计的前端;
15.所述加速度计组件用于采集列车运动过程中的加速度测量信息,输出方式为加速度,并将加速度测量信息发送至隔离模块;
16.所述隔离模块,用于完成姿态测量信息、加速度测量信息的隔离,以减少信号毛刺影响;
17.所述数据接收模块用于接收隔离模块发送的姿态测量信息、加速度测量信息;
18.所述故障检测模块用于对数据接收模块发送的陀螺组件输出信息、加速度计组件输出信息的可靠性进行诊断,剔除陀螺组件输出信息、加速度计组件输出信息的野值,并将输出数据发送至数据平滑模块;
19.所述数据平滑模块用于对姿态测量信息、加速度测量信息进行平滑,平滑方式采用低通滤波,以减小高频测量噪声的影响;
20.所述通信模块用于接收中央控制单元的控制命令,并利用控制命令控制所述时空
同步装置的运行状态,运行状态包括待机模式、测量模式、标校模式;
21.所述标定补偿模块用于接收数据平滑模块发送的平滑后的姿态测量信息、加速度测量信息,完成陀螺组件安装误差、加速度计安装误差、陀螺组件标度因数误差、加速度计组件标度因数误差的补偿,并将补偿后数据发送至重力敏感性误差补偿模块;
22.所述重力敏感性误差补偿模块用于陀螺组件重力敏感性误差及加速度计组件的二次项误差的补偿,以减少列车振动加速度对陀螺组件、加速度计组件精度的影响;
23.所述温度补偿模块用于接收重力敏感性误差补偿模块发送的补偿重力敏感性误差后的姿态测量信息、加速度测量信息,完成陀螺组件、加速度计组件温度敏感性误差的补偿,其中陀螺组件温度补偿模型采用二阶补偿模型,分别包含温度敏感常数项、温度敏感一次项、温度敏感二次项,加速度计组件温度补偿模型采用三阶模型,分别包含温度敏感常数项、温度敏感一次项、温度敏感二次项、温度敏感三次项;所述温度补偿模块将陀螺组件测量信息发送至姿态处理模块,将加速度计组件测量信息发送至速度处理模块、参考速度计算模块;
24.所述姿态处理模块用于接收温度补偿模块发送的陀螺组件测量信息完成姿态解算,并将姿态信息发送至速度处理模块、数据融合模块;
25.所述速度处理模块用于接收温度补偿模块发送的加速度计组件测量信息及姿态处理模块发送的姿态信息,完成速度解算,并将速度信息发送至数据融合模块;
26.所述参考速度计算模块包括计算模块和时间基准记录模块,其中,计算模块首先接收加速度计组件测量信息,进一步提取两只垂向加速度计测量信息,并采用滑窗求均值方式分别计算两只垂向加速度计的测量信息以获得各自的垂向加速度;计算模块进一步将前端垂向加速度计的垂向加速度计算值与设定阈值比较,如果大于设定阈值,则判断列车三轴加速度计组件安装位置点经过了轨道连接点,完成振动检测,并由时间基准记录模块记录当前时刻t1;计算模块再将后端垂向加速度计的垂向加速度计算值与设定阈值比较,如果大于设定阈值,则判断距离三轴加速计组件l距离处的垂向加速度计安装位置点经过了轨道连接点,完成振动检测,并由时间基准记录模块再次记录当前时刻t2;此时由计算模块计算列车参考速度,计算方式为l/(t2‑
t1);所述参考速度计算模块完成参考速度计算后将其发送至数据融合模块;
27.所述数据融合模块用于接收姿态处理模块发送的姿态信息、速度处理模块发送的速度信息及参考速度计算模块发送的参考速度,并通过误差状态卡尔曼滤波器对所述姿态信息、速度信息、参考速度信号进行融合处理,实现高频、高精度速度信息和位置信息估计,并对姿态误差、速度误差进行估计,进而将姿态误差、速度误差估计值分别反馈至姿态处理模块、速度处理模块,姿态处理模块、速度处理模块分别利用姿态误差估计值、速度误差估计值对姿态信息、速度信息进行校正;
28.所述位置装订模块用于不定时接收位置信息并发送至数据融合处理模块,数据融合处理模块将位置信息增广为误差状态卡尔曼滤波器的观测,以提高姿态误差、速度误差的估计精度;
29.所述频率计算模块用于接收数据融合处理模块发送的高频、高精度速度信号估计值,并按照采样时间与速度的乘积计算等效触发脉冲频率;
30.所述分频模块用于接收频率计算模块发送的等效触发脉冲频率,并以1毫米为基
准设置等效触发脉冲频率的数值,利用所述高精度时钟模块提供的基准时钟频率并通过dll或pll产生多路等效触发脉冲,各路等效触发脉冲频率根据设定值配置,设定值是1毫米基准值的整数倍;
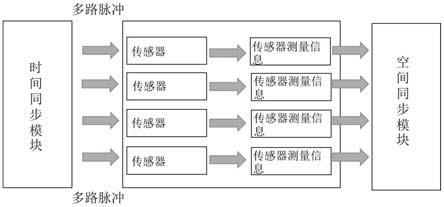
31.所述时间同步模块用于将分频模块发送的各路等效触发脉冲信号分别发送至巡检系统搭载的传感器,分别触发不同类型传感器采样,触发方式采用上升沿触发;
32.所述传感器信息采集模块用于完成巡检系统传感器测量信息的采样,采样时刻为上升沿触发时刻,采样完成后将传感器测量信息发送至空间同步模块;
33.所述空间同步模块用于接收传感器信息采集模块发送的传感器测量信息,并在上升沿触发时刻将巡检系统传感器测量信息与数据融合模块估计的三维位置信息进行标记,实现精准空间同步;
34.所述标校模块用于接收中央控制单元发送的校准标定参数、校准温度补偿参数、校准重力敏感性误差补偿参数,完成标定补偿模块、温度补偿模块、重力敏感性误差补偿模块的参数更新。
35.作为本发明的进一步改进,所述姿态处理模块采用双子样姿态更新方式以完成圆锥误差补偿,提供更高精度的姿态输出信息。
36.作为本发明的进一步改进,所述速度处理模块采用双子样划摇补偿方式以减小列车振动加速度对速度解算误差的影响。
37.作为本发明的进一步改进,所述陀螺组件、加速度计组件的采样频率大于等于500hz。
38.作为本发明的进一步改进,所述位置装订模块为gnss接收机。
39.作为本发明的进一步改进,陀螺组件、加速度计组件温度补偿模型中加入温度梯度补偿项,以减小环境场温度分布不均匀对陀螺组件、加速度计组件精度的影响。
40.作为本发明的进一步改进,所述标校模块采用无线通信方式与中央控制单元完成数据交换。
41.作为本发明的进一步改进,所述姿态处理模块利用姿态误差估计值对姿态信息进行校正、速度处理模块利用速度误差估计值对速度信息进行校正时均采用反馈校正方式。
42.与现有技术相比,本发明的优点在于:
43.本发明适用于随车测量巡检系统,无需在轨道车辆车轮上加装里程计,并且不需要与列车进行信号交互,能够基于两只相对位置固定安装的垂向加速度计的输出信息实现参考速度测量。本发明将估计的列车速度折算成等效触发脉冲,利用触发脉冲对列车搭载的传感器进行同步触发采样,以实现时间同步,利用高精度的位置估计值实现列车准确位置点与传感器采样点的精准对应,本发明实现了巡检系统搭载传感器测量信息的时空同步,能够有效提高测量效率。
附图说明
44.图1为本发明的工作机理示意图;
45.图2为基于双垂向加速度计实现振动检测测速的机理示意图。
具体实施方式
46.以下将结合说明书附图和具体实施例对本发明作进一步详细说明。
47.如图1所示,为本发明的工作机理示意图。
48.基于双垂向加速度计辅助的轨道巡检系统时空同步装置,所述装置由电源模块、陀螺组件、加速度计组件、隔离模块、数据接收模块、故障检测模块、数据平滑模块、通信模块、标定补偿模块、重力敏感性误差补偿模块、温度补偿模块、时间基准记录模块、姿态处理模块、速度处理模块、参考速度计算模块、数据融合模块、位置装订模块、频率计算模块、分频模块、高精度时钟模块、时间同步模块、传感器信息采集模块、空间同步模块、标校模块及中央控制单元组成;
49.所述电源模块包括一次电源模块、二次电源模块及电源管理模块;
50.所述一次电源模块,用于完成24v dc向5v dc的转换,并为二次电源模块提供输入,一次电源模块分别为陀螺组件、加速度计组件、隔离模块、数据接收模块、分频模块、高精度时钟模块、时间同步模块、传感器信息采集模块、空间同步模块、标校模块及中央控制单元供电;
51.所述二次电源模块,用于完成5v dc向3.3v dc的转换,并为故障检测模块、数据平滑模块、通信模块、标定补偿模块、重力敏感性误差补偿模块、温度补偿模块、姿态处理模块、速度处理模块、参考速度计算模块、数据融合模块、位置装订模块、频率计算模块供电;
52.所述电源管理模块,用于接收中央控制单元发送的电控指令,以控制一次电源模块、二次电源模块的供电、断电;
53.所述陀螺组件由三轴陀螺组成,安装方式采用正交安装,安装方向与列车前进方向平行;
54.所述陀螺组件用于采集列车运动过程中的姿态测量信息,输出方式为角增量信息,并将姿态测量信息发送至隔离模块;
55.所述加速度计组件由四轴加速度计组成,分别为两只水平加速度计、两只垂向加速度计,两只水平加速度计与一只垂向加速度计组成三轴加速度计组件,三轴加速度计组件的安装方式采用正交安装,安装方向与列车前进方向平行,另外一只垂向加速度计在垂直方向安装,相距三轴加速度计组件的距离为固定值l,并且三轴加速度计组件位于单只垂向加速度计的前端;
56.所述加速度计组件用于采集列车运动过程中的加速度测量信息,输出方式为加速度,并将加速度测量信息发送至隔离模块;
57.所述隔离模块,用于完成姿态测量信息、加速度测量信息的隔离,以减少信号毛刺影响;
58.所述数据接收模块用于接收隔离模块发送的姿态测量信息、加速度测量信息;
59.所述故障检测模块用于对数据接收模块发送的陀螺组件输出信息、加速度计组件输出信息的可靠性进行诊断,剔除陀螺组件输出信息、加速度计组件输出信息的野值,并将输出数据发送至数据平滑模块;
60.所述数据平滑模块用于对姿态测量信息、加速度测量信息进行平滑,平滑方式采用低通滤波,以减小高频测量噪声的影响;
61.所述通信模块用于接收中央控制单元的控制命令,并利用控制命令控制所述时空
同步装置的运行状态,运行状态包括待机模式、测量模式、标校模式;
62.所述标定补偿模块用于接收数据平滑模块发送的平滑后的姿态测量信息、加速度测量信息,完成陀螺组件安装误差、加速度计安装误差、陀螺组件标度因数误差、加速度计组件标度因数误差的补偿,并将补偿后数据发送至重力敏感性误差补偿模块;
63.所述重力敏感性误差补偿模块用于陀螺组件重力敏感性误差及加速度计组件的二次项误差的补偿,以减少列车振动加速度对陀螺组件、加速度计组件精度的影响;
64.所述温度补偿模块用于接收重力敏感性误差补偿模块发送的补偿重力敏感性误差后的姿态测量信息、加速度测量信息,完成陀螺组件、加速度计组件温度敏感性误差的补偿,其中陀螺组件温度补偿模型采用二阶补偿模型,分别包含温度敏感常数项、温度敏感一次项、温度敏感二次项,加速度计组件温度补偿模型采用三阶模型,分别包含温度敏感常数项、温度敏感一次项、温度敏感二次项、温度敏感三次项;所述温度补偿模块将陀螺组件测量信息发送至姿态处理模块,将加速度计组件测量信息发送至速度处理模块、参考速度计算模块;
65.所述姿态处理模块用于接收温度补偿模块发送的陀螺组件测量信息完成姿态解算,并将姿态信息发送至速度处理模块、数据融合模块;
66.所述速度处理模块用于接收温度补偿模块发送的加速度计组件测量信息及姿态处理模块发送的姿态信息,完成速度解算,并将速度信息发送至数据融合模块;
67.所述参考速度计算模块包括计算模块和时间基准记录模块,其中,计算模块首先接收加速度计组件测量信息,进一步提取两只垂向加速度计测量信息,并采用滑窗求均值方式分别计算两只垂向加速度计的测量信息以获得各自的垂向加速度;计算模块进一步将前端垂向加速度计的垂向加速度计算值与设定阈值比较,如果大于设定阈值,则判断列车三轴加速度计组件安装位置点经过了轨道连接点,完成振动检测,并由时间基准记录模块记录当前时刻t1;计算模块再将后端垂向加速度计的垂向加速度计算值与设定阈值比较,如果大于设定阈值,则判断距离三轴加速计组件l距离处的垂向加速度计安装位置点经过了轨道连接点,完成振动检测,并由时间基准记录模块再次记录当前时刻t2;此时由计算模块计算列车参考速度,计算方式为l/(t2‑
t1);所述参考速度计算模块完成参考速度计算后将其发送至数据融合模块;参考速度计算机理见图2所示。
68.所述数据融合模块用于接收姿态处理模块发送的姿态信息、速度处理模块发送的速度信息及参考速度计算模块发送的参考速度,并通过误差状态卡尔曼滤波器对所述姿态信息、速度信息、参考速度信号进行融合处理,实现高频、高精度速度信息和位置信息估计,并对姿态误差、速度误差进行估计,进而将姿态误差、速度误差估计值分别反馈至姿态处理模块、速度处理模块,姿态处理模块、速度处理模块分别利用姿态误差估计值、速度误差估计值对姿态信息、速度信息进行校正;
69.所述位置装订模块用于不定时接收位置信息并发送至数据融合处理模块,数据融合处理模块将位置信息增广为误差状态卡尔曼滤波器的观测,以提高姿态误差、速度误差的估计精度;
70.所述频率计算模块用于接收数据融合处理模块发送的高频、高精度速度信号估计值,并按照采样时间与速度的乘积计算等效触发脉冲频率;
71.所述分频模块用于接收频率计算模块发送的等效触发脉冲频率,并以1毫米为基
准设置等效触发脉冲频率的数值,利用所述高精度时钟模块提供的基准时钟频率并通过dll或pll产生多路等效触发脉冲,各路等效触发脉冲频率根据设定值配置,设定值是1毫米基准值的整数倍;
72.所述时间同步模块用于将分频模块发送的各路等效触发脉冲信号分别发送至巡检系统搭载的传感器,分别触发不同类型传感器采样,触发方式采用上升沿触发;
73.所述传感器信息采集模块用于完成巡检系统传感器测量信息的采样,采样时刻为上升沿触发时刻,采样完成后将传感器测量信息发送至空间同步模块;
74.所述空间同步模块用于接收传感器信息采集模块发送的传感器测量信息,并在上升沿触发时刻将巡检系统传感器测量信息与数据融合模块估计的三维位置信息进行标记,实现精准空间同步;
75.所述标校模块用于接收中央控制单元发送的校准标定参数、校准温度补偿参数、校准重力敏感性误差补偿参数,完成标定补偿模块、温度补偿模块、重力敏感性误差补偿模块的参数更新。
76.作为本发明的进一步改进,所述姿态处理模块采用双子样姿态更新方式以完成圆锥误差补偿,提供更高精度的姿态输出信息。
77.作为本发明的进一步改进,所述速度处理模块采用双子样划摇补偿方式以减小列车振动加速度对速度解算误差的影响。
78.作为本发明的进一步改进,所述陀螺组件、加速度计组件的采样频率大于等于500hz。
79.作为本发明的进一步改进,所述位置装订模块为gnss接收机。
80.作为本发明的进一步改进,陀螺组件、加速度计组件温度补偿模型中加入温度梯度补偿项,以减小环境场温度分布不均匀对陀螺组件、加速度计组件精度的影响。
81.作为本发明的进一步改进,所述标校模块采用无线通信方式与中央控制单元完成数据交换。
82.作为本发明的进一步改进,所述姿态处理模块利用姿态误差估计值对姿态信息进行校正、速度处理模块利用速度误差估计值对速度信息进行校正时均采用反馈校正方式。
83.以上所述仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。