1.本发明属于机器人技术领域,尤其涉及一种可适用于不同曲率半径的储罐内外壁爬壁机器人。
背景技术:
2.近年来,我国石化、核电、火电等国民经济支柱产业发展呈现井喷态势,其很大程度上依赖于石化及放射物储罐、锅炉等核心装备的安全运营。定期对上述装备开展打磨、喷漆、检测等立面维护作业已成为保障其安全运营的重要举措,据此催生出年均产值数百亿的立面维护行业。立面维护行业长期依赖于人工进行高空作业,智能化、自动化程度不高。由于环保压力,人力短缺等外在条件的制约,当前全球立面维护行业已处于维护作业工艺与装备升级换代的关键时期,故需要研制一台可以代替人工检测,打磨等作业的爬壁机器人移动本体。
3.有鉴于此,特提出本发明。
技术实现要素:
4.针对现有技术中存在的问题,本发明的目的是提供一种可适用于不同曲率半径的储罐内外壁爬壁机器人,可适用于不同曲率半径的罐体,例如球罐、柱罐,能够在导磁金属储罐等大型立面上,特别是针对球罐、柱罐的内外壁,前端为定向轮驱动单元,后端为万向轮随动单元,壁面转向灵活,利用永磁体吸附技术,配合可更换磁轮单元,可适应同一个罐内外壁的曲率变化,实现大范围安全稳定运动,可搭载不同的作业模块,实现壁面多功能作业。
5.为了实现上述目的,本发明提供的一种可适用于不同曲率半径的储罐内外壁爬壁机器人,包括车体单元,自前至后依次对称设置在车体单元两侧的定向轮驱动单元和万向轮随动单元,以及可更换磁轮单元;所述车体单元呈长方体盒状结构,所述车体单元的下盖板上设有阵列式永磁体,与可更换磁轮单元相匹配,所述车体单元的前侧板设有用于固定前摄像头的摄像头安装盒,所述车体单元的上盖板后部通过摄像头安装板固定有后摄像头;所述上盖板和下盖板上设有若干机械电器快速接口;所述定向轮驱动单元包括伺服电机、电机固定板、换向器、换向器固定板、减速器输入法兰、谐波减速器、减速器输出法兰、定向轮驱动法兰、限位盘和定向轮;所述伺服电机通过电机固定板固定在下盖板上,所述换向器通过换向器固定板安装在下盖板上,所述换向器的输出端与减速器输入法兰通过轴输入,所述伺服电机通过换向器将驱动力矩传递到减速器输入法兰,通过带动谐波减速器转动,进而带动定向轮转动;所述减速器输出法兰与定向轮驱动法兰为异形孔传动;所述限位盘用于限制定向轮的压缩量;所述万向轮随动单元包括后轮铰接板一、后轮铰接板二、万向轮连接板、轴承固定板、推力轴承、小轴承端盖、轴向固定轴、万向轮支架、止动螺母、万向轮连接轴、弹垫、固定螺母和万向轮;所述后轮铰接板一通过螺钉固定在左右侧板上,万向轮连接板通过螺钉固
定在后轮铰接板二上,所述轴承固定板与万向轮连接板通过推力轴承连接,所述推力轴承分别嵌入轴承固定板和万向轮连接板且过小轴承端盖和轴向固定轴固定,所述万向轮支架与轴承固定板通过螺钉连接,所述万向轮为二自由度随动万向轮,偏心设置的所述万向轮通过万向轮连接轴、固定螺母和弹垫与万向轮支架相连,所述止动螺母用于对万向轮做机械锁死;所述可更换磁轮单元包括铝合金轮毂、橡胶包胶、磁铁固定轴、轴承、扇形磁铁和轮盖;所述扇形磁铁固定在磁铁固定轴上绕其中心旋转,磁铁固定轴固定在轮盖上,所述轮盖固定在铝合金轮毂上。
6.优选地,所述前摄像头上安装有透明挡板;优选地,所述车体单元的前侧板、后侧板和/或左右侧板上设有便于人工搬运的把手;优选地,所述轴向固定轴与小轴承端盖为双螺钉连接;优选地,所述铝合金轮毂外部具有橡胶包胶,用于防止运动过程中发生滑移。
7.本发明提供的一种可适用于不同曲率半径的储罐内外壁爬壁机器人,具有如下有益效果:1.本发明有效避免现有技术存在的罐体的立面维护行业长期依赖于人工进行高空作业的技术问题。本发明通过将车体单元、定向轮驱动单元和万向轮随动单元按本发明限定的特定连接关系和位置关系组合的形成的可适用于不同曲率半径的储罐内外壁爬壁机器人,针对导磁罐体的内外壁面作业,定向轮设置在二自由度随动的万向轮前方,可以根据不同的壁面情况调整倾斜角度,保证永磁体对于罐体表面的有效吸附面积和距离,实现机器人可以在直径≥10米的球罐、柱罐上安全稳定的运动,极大的提高了机器人本体的在不同曲率表面的吸附有效性和安全性;同时,万向轮采用偏心安装的形式,转轴中心与车轮轴心不重合,提高了转向的灵活性,而且,万向轮结构上设计有止动螺母,在搭载检测模块进行检测或其他对运动精度要求较高的的作业时,进行机械锁死,防止在机器人换向的过程中车体发生偏移,保证机器人换向的精度实现爬壁机器人在球罐和柱罐的内外壁的曲率适应,通过搭载不同的作业模块,达到爬壁机器人的交叉稳定作业,提高作业效率。
8.2.本发明还具有第二种组合形式,采用高性能型号永磁体和可更换磁轮单元组合磁吸附的组合形式,可更换磁轮单元内置角度可调节的扇形磁铁,使高性能型号永磁体吸附的方向始终垂直于壁面,可根据不同的作业状态进行更换与组合,实现吸附力最大化,保证机器人作业的稳定性。此外,高性能型号永磁体可以用添加垫片的形式调整磁铁与壁面的距离,进而调整吸附力的大小。
9.3.采用前后双摄像头形式,可实现对作业情况的实时观察,以在必要的时候进行人工纠偏,且前摄像头为嵌入式安装,增加了摄像头的稳定性,防止由于机器人运动导致的画面抖动,便于作业人员观察与操作。
10.4.上盖板和下盖板上均留有多个机械电器快速接口,方便根据不同的作业需求搭载相应的作业模块,实现一机多用的效果。
11.5.在机器人的驱动装置上,由于直角减速器尺寸和重量较大,且实际使用时问题较突出,磨合时间相对较长,在本专利中选用的是换向器加谐波减速器的形式替代传统的直角减速器,缩小了机器人的整体尺寸,减轻了重量,可实现现场的即装即用和极限作业。
12.6.选用定向轮加限位盘的组合形式,通过调节定向轮的轮胎的气压,满足不同的运动需求,气压过低时,限位盘会与定向轮同时接触壁面,一是防止车体刮伤壁面,二是同时提供摩擦力,保证机器人的稳定作业。
附图说明
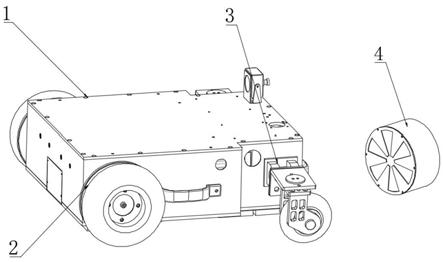
13.图1为本发明提供的一种可适用于不同曲率半径的储罐内外壁爬壁机器人的结构示意图。
14.图2为本发明提供的一种可适用于不同曲率半径的储罐内外壁爬壁机器人的轴测示意图。
15.图3为为本发明提供的一种可适用于不同曲率半径的储罐内外壁爬壁机器人的俯视示意图。
16.图4为本发明提供的一种可适用于不同曲率半径的储罐内外壁爬壁机器人的后视示意图。
17.图5为本发明提供的一种可适用于不同曲率半径的储罐内外壁爬壁机器人的内部结构示意图。
18.图6为本发明提供的一种可适用于不同曲率半径的储罐内外壁爬壁机器人的万向轮随动单元的结构示意图。
19.图7为图5和图6的a-a方向剖视图。
20.图8为本发明提供的一种可适用于不同曲率半径的储罐内外壁爬壁机器人的可更换磁轮单元的结构示意图。
21.图中:1.车体单元101.上盖板102.下盖板103.前侧板104.后侧板105.左右侧板106.前摄像头安装盒107.前摄像头挡板108.后摄像头安装板109.前摄像头110.后摄像头111.永磁体112.永磁体固定板113.金属把手;2.定向轮驱动单元201.伺服电机202.电机固定板203.换向器204.换向器固定板205.减速器输入法兰206.谐波减速器207.减速器输出法兰210.定向轮驱动法兰211.限位盘212.定向轮;3.万向轮随动单元301.后轮铰接板一302.后轮铰接板二303.万向轮连接板304.轴承固定板305.推力轴承306.小轴承端盖307.轴向固定轴308.万向轮支架309.止动螺母310.万向轮连接轴311.弹垫312.固定螺母313.万向轮;4.可更换磁轮单元401.铝合金轮毂402.橡胶包胶403.磁铁固定轴404.轴承405.扇形磁铁406.轮盖。
具体实施方式
22.下面结合具体实施例和附图对本发明做进一步说明,以助于理解本发明的内容。
23.如图1-8所示,为本发明提供的一种可适用于不同曲率半径的储罐内外壁爬壁机器人,包括车体单元,自前至后依次对称设置在车体单元两侧的定向轮驱动单元和万向轮随动单元,以及可更换磁轮单元;车体单元呈长方体盒状结构,包括上盖板101、下盖板102、前侧板103、后侧板104、左右侧板105、前摄像头安装盒106、前摄像头挡板107、后摄像头安
装板108、前摄像头109、后摄像头110、永磁体111、永磁体固定板112、金属把手113。上盖板101、下盖板102、前侧板103、后侧板104和左右侧板105利用螺钉固连组成车体单元1的框架,高性能型号永磁体111阵列式安装在下盖板102上,可与可更换磁轮单元4相匹配,为爬壁机器人提供安全稳定的吸附力;前侧板103通过前摄像头安装盒106固定设有一前摄像头109,用以观察壁面的作业情况,防止发生大的偏移,前摄像头109前方安装有前摄像头挡板107,防止在作业过程中损伤前摄像头109。上盖板101的后部通过后摄像头安装板108固定设有一后摄像头110,用以观察机器人周围的环境,防止发生碰撞。同时,前侧板103、后侧板104和/或左右侧板105装有金属把手113,便于工作人员进行搬运。
24.如图5所示,定向轮驱动单元2包括伺服电机201、电机固定板202、换向器203、换向器固定板204、减速器输入法兰205、谐波减速器206、减速器输出法兰207、定向轮驱动法兰210、限位盘211、定向轮212。伺服电机201通过电机固定板202固定在车体底板上,换向器203通过换向器固定板204固定在下盖板102上,换向器203输出端与减速器输入法兰205通过轴输入,伺服电机201通过换向器203将驱动力矩传递到减速器输入法兰205,进而带动谐波减速器206转动,减速器输出法兰207与定向轮驱动法兰210为异形孔传动,定向轮212为充气轮胎,限位盘211起到对定向轮212的限位作用,防止定向轮212由于磁力过大导致定向轮212压缩太大。
25.如图6-7所示,万向轮随动单元3包括后轮铰接板一301、后轮铰接板二302、万向轮连接板303、轴承固定板304、推力轴承305、小轴承端盖306、轴向固定轴307、万向轮支架308、止动螺母309、万向轮连接轴310、弹垫311、固定螺母312、万向轮313。其中,万向轮随动单元为关于车体左右对称结构,结构完全相同;后轮铰接板一301通过螺钉固定在左右侧板105上,万向轮连接板303通过螺钉固定在后轮铰接板二302上,轴承固定板304与万向轮连接板303通过推力轴承305连接,推力轴承305分别嵌入轴承固定板304和万向轮连接板303,并通过小轴承端盖306和轴向固定轴307固定,轴向固定轴307与小轴承端盖306为双螺钉连接,防止在万向轮313转动过程中发生晃动或掉轮的现象,万向轮支架308与轴承固定板304通过螺钉连接,万向轮连接轴310和固定螺母312,对万向轮313进行轴向定位,配合弹垫311,防止在运动过程中由于机械振动固定螺母312发生松动,止动螺母309的作用是在爬壁机器人搭载检测模块等其他对前后运动精度要求较高的情况下对万向轮313做机械锁死,防止在机器人后退的瞬间发生偏移。
26.如图8所示,可更换磁轮单元4包括铝合金轮毂401、橡胶包胶402、磁铁固定轴403、轴承404、扇形磁铁405、轮盖406。其中,扇形磁铁405固定在磁铁固定轴403上,磁铁固定轴403上安装有轴承,以使扇形磁铁405由于磁力作用绕磁铁固定轴403旋转,磁铁固定轴403固定在两侧的轮盖406上,轮盖406固定在铝合金轮毂401上,铝合金轮毂401外部进行橡胶包胶402,防止运动过程中发生滑移等。
27.本发明的工作流程为:爬壁机器人的移动方式部分:爬壁机器人上电后,由人工搬运至罐体的壁面进行作业,机器人移动方式为前轮双驱动,由两个完全相同的伺服电机201作为动力,通过换向器203连接到减速器输入法兰205,大速比谐波减速器206减速后实现增大扭矩的效果,带动定向轮212转动,限位盘211起到限制定向轮212压缩量的作用。转弯的实现是靠伺服电机201的差速转动,且机器人的随动万向轮313部分由于存在两个自由度,更利于转弯的实现,
当曲率不同时,后面两个随动万向轮313可以根据不同的表面情况调整倾斜角度,实现机器人可以在直径≥10米的球罐、储罐上安全稳定的运动。
28.车体上搭载作业模块进行作业的同时,前摄像头109通过固定高度安装对作业情况进行观察,并通过前摄像头109可以观察到方向是否发生偏移,以便及时进行调整;后摄像头110固定安装以用来观察周围环境。
29.可更换磁轮单元4的运动方式:磁轮内部的扇形磁铁405与壁面之间存在磁力,扇形磁铁405磁力最大方向旋转至垂直于壁面,使得扇形磁铁405距离壁面得距离最小且磁力始终保持一个较大值,尤其是当爬壁机器人进行小高度越障时,扇形磁铁405始终垂直于磁力最大的壁面,可实现较稳定的越障。
30.本文中应用了具体个例对发明构思进行了详细阐述,以上实施例的说明只是用于帮助理解本发明的核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离该发明构思的前提下,所做的任何显而易见的修改、等同替换或其他改进,均应包含在本发明的保护范围之内。