1.本发明涉及地面客运缆车领域,具体涉及一种客运地面缆车安全保护系统。
背景技术:
2.地面客运缆车的轿厢一般采用钢丝绳牵引,采用大直径滚筒的绞车驱动,且通常都是沿着一定坡度的轨道上往复行驶。可作为城市公共交通工具,也可作为景区游客的旅游观光载具。因其牵引系统与轿厢采用柔性连接,结构特殊,可能因断绳、超速、信号传输故障造成重大安全事故。因涉及乘客的生命安全,其安全保护系统的可靠性成为缆车设计、制造、安装、验收过程中最关注的焦点。
技术实现要素:
3.本发明的目的在于提供一种客运地面缆车安全保护系统。以解决上述背景技术中提出的因断绳、超速、信号传输故障造成重大安全事故的问题。
4.为实现上述发明目的,本发明所采用的技术方案是:一种客运地面缆车安全保护系统,包括轿厢和远程控制室,所述远程控制室内部署有终端控制器,还包括运行防护系统,所述运行防护系统包括双断绳检测单元、双超检测单元和双信号传输单元;
5.所述双断绳检测单元用于实时监测轿厢的钢索的张力值,并将张力监测值通过双信号传输单元传输至终端控制器中;
6.所述双超检测单元用于实时监测轿厢的行驶速度以及钢索的绳速,并将速度监测值通过双信号传输至终端控制器中;
7.所述终端控制器根据张力监测值、速度监测值或运行状态中的一个或多个作为控制信号对轿厢进行远程控制。
8.优选地,所述双信号传输单元包括无线ap/网桥、固定全向天线、移动全向天线和快速漫游客户端,所述移动全向天线和快速漫游客户端部署在轿厢侧,所述无线ap/网桥、固定全向天线部署在远程控制室侧;
9.所述固定全向天线分别与终端控制器和无线ap/网桥通信互连,所述快速漫游客户端与移动全向天线通信互连,所述移动全向天线与无线ap/网桥通信互连。
10.优选地,所述双信号传输单元还包括滑触线,所述滑触线沿着轿厢运行的轨道部署,所述滑触线与终端控制器通信相连,所述滑触线上设有集电器,所述集电器安装在轿厢上。
11.优选地,所述双断绳检测单元包括第一张力检测模块和第二张力检测模块,所述第一张力检测模块包括安装在钢索末端的张力传感器,所述张力传感器通过信号线分别与无线ap/网桥、终端控制器相连;
12.所述第二张力检测模块包括安装在轿厢内的轨道制动控制器、以及安装在轿厢底部的导向轮结构上的拉力传感器,所述拉力传感器通过信号线分别与轨道制动控制器和快速漫游客户端相连,所述轨道制动控制器和快速漫游客户端通信互连;所述集电器与轨道
制动控制器通信相连。
13.优选地,还包括制动器,所述制动器通过信号线与轨道制动控制器相连。
14.优选地,所述集电器采用双电刷结构。
15.优选地,所述双超检测单元包括行驶速度检测模块和绳速检测模块,所述行驶速度检测模块包括第一孔盘和第一霍尔传感器,所述第一孔盘安装在轿厢的车轮上,所述第一霍尔传感器通过信号线分别与快速漫游客户端、轨道制动控制器相连;
16.所述绳速检测模块包括第二孔盘和第二霍尔传感器,所述第二孔盘安装在部署在远程控制室侧的第一导向轮上,所述第二霍尔传感器通过信号线分别与无线ap/网桥、终端控制器相连。
17.优选地,所述运行防护系统还包括对第一导向轮进行断轴保护的防护单元,所述防护单元包括断轴检测开关、以及防护结构,所述防护结构安装在第一导向轮上,所述断轴检测开关将监测到的断轴故障信息发送至终端控制器。
18.优选地,所述防护结构包括轮底座,所述轮底座上设有轮轴,所述第一导向轮转动连接在轮轴上,位于轮轴四周的轮底座上设有若干块加固板,所述加固板远离轮底座的一端设有凸起,所述第一导向轮上设有一圈凸棱,所述凸棱上设有一圈限位槽,所述凸起插设在限位槽内,所述限位槽的宽度大于凸起的厚度。
19.优选地,所述加固板采用4块。
20.本发明的有益效果集中体现在:
21.1、本发明可以对缆车运行中的行驶速度、钢索的张力值进行实时监测。
22.2、本发明还设置断双断绳检测单元、双超检测单元,两组检测单元分别安装在移动载体和固定载体上,任意一组单元发生故障时,另一组单元正常有效,保证了检测信号的准确、可靠。
23.3、本发明的双信号传输单元采用有线和无线两种方式,确保了信号的稳定、可靠。
附图说明
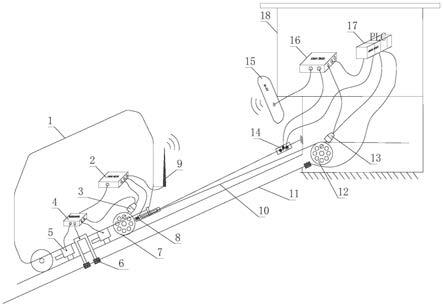
24.图1是本发明防护系统整体结构示意图;
25.图2是本发明轿厢底部导向轮结构安装示意图;
26.图3是本发明张力传感器结构示意图;
27.图4是本发明断轴防护单元结构示意图;
28.图例说明:1、轿厢;2、快速漫游客户端;3、第一霍尔传感器;4、轨道制动控制器;5、制动器;6、集电器;7、第一孔盘;8、拉力传感器;9、移动全向天线;10、钢索;11、滑触线;12、第二孔盘;13、第二霍尔传感器;14、张力传感器;15、固定全向天线;16、无线ap/网桥;17、终端控制器;18、远程控制室;19、轮架;20、梁框;21、导向滑轨;22、第二导向轮;23、断轴检测开关;24、轮底座;25、轮轴;26、加固板;27、凸起;28、凸棱;29、限位槽。
具体实施方式
29.为了使本领域的技术人员更好地理解本发明的技术方案,下面结合附图和具体实施例对本发明作进一步的详细说明。
30.如图1所示,一种客运地面缆车安全保护系统,包括轿厢1、远程控制室18、轨道和
钢索10,轿厢1可在轨道上滑行,轨道起到导向的作用,钢索10用于驱动缆车;所述远程控制室18内主要部署有终端控制器17,用于对轿厢1的运行进行控制,在本实施例中终端控制器17采用plc控制器,以及还包括运行防护系统,运行保护系统用于对缆车运行状态进行监测,所述运行保护系统包括双断绳检测单元、双超检测单元和双信号传输单元;
31.所述双断绳检测单元用于实时监测轿厢1的钢索10的张力值,并将张力监测值通过双信号传输单元传输至终端控制器17中;
32.所述双超检测单元用于实时监测轿厢1的行驶速度以及钢索10的绳速,并将速度监测值通过双信号传输至终端控制器17中;
33.所述终端控制器17根据张力监测值、速度监测值或运行状态中的一个或多个作为控制信号对轿厢1进行远程控制;当上述监测值中任意一个出现异常时,均可采用制动单元对轿厢1进行制动,提高缆车运行的安全系数。
34.进一步地,所述双信号传输单元包括无线ap/网桥16、固定全向天线15、移动全向天线9和快速漫游客户端2,所述移动全向天线9和快速漫游客户端2部署在轿厢1侧,其中快速漫游客户端2安装在轿厢1内,移动全向天线9安装在轿厢1外,所述无线ap/网桥16、固定全向天线15部署在远程控制室18侧,其中固定全向天线15安装在远程控制室18外,无线ap/网桥16安装在远程控制室18内;
35.所述固定全向天线15分别与终端控制器17和无线ap/网桥16通信互连,所述快速漫游客户端2与移动全向天线9通信互连,所述移动全向天线9与无线ap/网桥16通信互连。
36.进一步地,由于直接采用无线通信模式,实际应用中无线传输容易受到干扰,不可靠,导致缆车运行时会存在安全隐患;因此对双信号传输单元进行进一步改进,所述双信号传输单元还包括滑触线11,所述滑触线11沿着轿厢1运行的轨道部署,所述滑触线11与终端控制器17通信相连,所述滑触线11上设有集电器6,所述集电器6安装在轿厢1上,继电器通过信号线与下述的轨道制动控制器4相连,为防止集电器6通过滑触线11接头或正常滑动时,可能出现闪断,在本实施例中集电器6选用双电刷以确保信号传输稳定,避免误动作。
37.在本实施例中,无线ap/网桥16能够代替网线、光纤等需要布线、拉线的器材,进行远距离的无线传输,在一些布线困难、甚至无法布线的情况下,使用无线ap/网桥16则可以解决这类问题;并且,滑触线11因其结构简单、安装方便,作为信号传输使用,具有传输可靠、稳定、抗干扰能力强等优点,可适用于滑动距离远(运行长度250m)、滑动速度快(2.5m/s)的条件下;其次,滑触线11选用dhg型多极导管式滑触线11,移动全向天线9、固定全向天线15的信号频率为2.4ghz,增益为12db。
38.进一步地,所述双断绳检测单元包括第一张力检测模块和第二张力检测模块,如图1、3所示,所述第一张力检测模块包括安装在钢索10末端的张力传感器14,也就是说张力传感器14是部署在控制室侧的,张力传感器14直接检测钢索10的张力,判断钢索10是否超载或者短绳;所述张力传感器14通过信号线分别与无线ap/网桥16、终端控制器17相连;
39.所述第二张力检测模块包括安装在轿厢1内的轨道制动控制器4、以及安装在轿厢1底部的导向轮结构上的拉力传感器8,在本实施例中对于导向轮结构的具体结构,如图2所示,导向轮结构包括轮架19,轮架19呈框形结构,所述轮架19上转动连接有第二导向轮22,所述轮架19外套设有梁框20,所述梁框20固定在轿厢1的底部上,梁框20相对的侧壁上设有导向滑轨21,轮架19的两侧插设在导向滑轨21上,拉力传感器8设置在轮架19的滑动方向
上,拉力传感器8一端与轮架19相连,另一端与梁框20相连,所述拉力传感器8通过信号线分别与轨道制动控制器4和快速漫游客户端2相连,所述轨道制动控制器4和快速漫游客户端2通信互连;所述集电器6与轨道制动控制器4通信相连;拉力传感器8既可测定钢索10的张力,还可测量轿厢1的负荷,判断轿厢1是否超载。
40.在本实施例中拉力传感器8和张力传感器14可同时对钢索10张力进行实时监测,再由终端控制器17根据收到的信号判断为断绳或轨超载,两种测量模式的结合,可以确保一种测量模式故障时,另一种准确有效,提高了缆车运行的安全性。张力传感器14为旁压时张力传感器14,拉力传感器8为型板环拉力传感器8,两个传感器的输出的信号均为4
‑
20ma的电流信号,两个传感器测量精度高,性能稳定,安装方便,适用于钢索10张力的长期测量与监控。
41.进一步地,还包括制动器5,所述制动器5通过信号线与轨道制动控制器4相连,制动器5用于对轿厢1的紧急制动。
42.控制原理:在终端控制器17的控制程序中设置最大允许张力和最小允许张力,检测到的张力小于最小允许张力时,系统判断为牵引绳断裂,启动应急制动系统。当检测到的张力大于最大允许张力时,系统判断轨超载,蜂鸣报警
43.进一步地,所述双超检测单元包括行驶速度检测模块和绳速检测模块,所述行驶速度检测模块包括第一孔盘7和第一霍尔传感器3,所述第一孔盘7安装在轿厢1的车轮上,第一霍尔传感器3安装在车轮的支架上,所述第一霍尔传感器3通过信号线分别与快速漫游客户端2、轨道制动控制器4相连;在本实施例中车轮转动带动第一孔盘7旋转,圆孔通过第一霍尔传感器3时引起电路磁阻变化,经过放大整形后形成一个方波电脉冲信号,信号通过双信号传输单元到达终端控制器17,终端控制器17根据单位时间接收到的脉冲个数计算出车轮转速,再转换为轿厢1的行驶速度。
44.所述绳速检测模块包括第二孔盘12和第二霍尔传感器13,所述第二孔盘12安装在部署在远程控制室18侧的第一导向轮上,所述第二霍尔传感器13通过信号线分别与无线ap/网桥16、终端控制器17相连;在本实施例中第二导向轮22转动带动孔盘旋转,圆孔通过第二霍尔传感器13时引起电路磁阻变化,形成方波电脉冲信号,信号经通讯线传输至终端控制器17,通过记录单位时间脉冲个数得到牵引轿厢1的钢丝绳绳速,进而确定轿厢1的行驶速度。
45.在本实施例中第一孔盘7、第二孔盘12的材料均为普通碳素钢,用螺栓固定,检修或测试时,拆卸、安装方便。
46.控制原理:当终端控制器17根据双超检测单元任一检测模块发回数据,判断轿厢1行驶速度超速20%时,立即通过滑触线11及无线网桥双通道将紧急制动信号传输至轨道制动控制器4,启动轨道制动器5紧急制动,同时启动轿厢1的牵引绞车制动系统。
47.进一步地,钢索10绕在第一导向轮上,由于第一导向轮的出、入绳包角大,轮体和轮轴25反复受交变应力作用,轮轴25也成为重要安全隐患部件,因此设置断轴防护单元,如图4所示,所述运行防护系统还包括对第一导向轮进行断轴保护的防护单元,所述防护单元包括断轴检测开关23、以及防护结构,所述防护结构安装在第一导向轮上,所述断轴检测开关23将监测到的断轴故障信息发送至终端控制器17,告知控制室内的工作人员。
48.进一步地,所述防护结构包括轮底座24,所述轮底座24上设有轮轴25,所述轮底座
24上设有轮轴25,所述第一导向轮转动连接在轮轴25上,位于轮轴25四周的轮底座24上设有若干块加固板26,所述加固板26远离轮底座24的一端设有凸起27,所述第一导向轮上设有一圈凸棱28,所述凸棱28上设有一圈限位槽29,所述凸起27插设在限位槽29内;在凸起27插入到限位槽29内后,两者之间存在间隙,不会出现相互摩擦,其次断轴检测开关23设置在导向轮的一侧;在本实施例中优选采用四块加固板26,加固板26通过螺栓与轮底座24相连,四块加固板26将轮轴25包覆住,在出现断轴后,在凸起27的作用下,导向轮不会脱落,引发安全事故;该防护结构具有结构简单、安装拆卸方便、造价便宜,具有良好的实用性。
49.需要说明的是,对于前述的各个方法实施例,为了简单描述,故将其都表述为一系列的动作组合,但是本领域技术人员应该知悉,本技术并不受所描述的动作顺序的限制,因为依据本技术,某一些步骤可以采用其他顺序或者同时进行。其次,本领域技术人员也应该知悉,说明书中所描述的实施例均属于优选实施例,所涉及的动作和单元并不一定是本技术所必须的。