1.本实用新型涉及仿生机器人技术领域,尤其涉及一种仿生机器人腿部结构。
背景技术:
2.相比于轮式机器人,足式机器人地形适应能力更强,能够在复杂的地形环境下灵活运动,国内外各科研机构都在努力推进四足机器人的进程。
3.足式机器人目前主要有双足机器人、四足机器人两类;其中,常见的四足机器人膝关节驱动方案一般是由布置于躯干高度的关节模组提供动力源,通过布置于大腿腔体内侧的传动结构将动力源的扭矩传递至膝关节处,带动小腿运动。四足机器人目前常用的膝关节传动方案主要有通过:四连杆机构、同步带轮机构、链轮机构等实现。其中,四连杆机构用于一般或较重载荷的场合。
4.申请号为cn201720232286.5的实用新型提供了一种电驱动四足机器人的腿部动力系统结构,其具有承载能力大、传动比稳定等优点。但同时,基于四连杆结构本身的膝关节方案,其难以解决安全隐患较大、防尘防水等级较低的问题。此类结构对四连杆结构无法进行有效的保护,难以保证连接轴处,轴承、主轴的防护等级,在降低了部件寿命的同时,还影响了腿部整体造型的美观程度,且由于膝关节传动处为活动机构,力矩大、速度快,使用人员一旦不慎与活动机构直接接触,会对人体造成严重地损害,此类结构存在着极大的安全隐患。
技术实现要素:
5.本实用新型的目的在于提供一种仿生机器人腿部结构,以解决机器人腿部结构存在安全隐患、防护效果差的问题。
6.为达此目的,本实用新型采用以下技术方案:
7.一种仿生机器人腿部结构,包括壳体、腿部构件和转轴;所述壳体设有容纳腔和与所述容纳腔连通的避让口;所述腿部构件包括大腿杆、足端和小腿杆,所述大腿杆位于所述容纳腔内,所述小腿杆的一端固连有所述足端,另一端穿过所述避让口伸入所述容纳腔内;所述转轴贯穿所述容纳腔,所述壳体通过转轴与所述小腿杆铰接,所述避让口两侧的长度方向均与所述转轴的长度方向相同,所述转轴分别与所述避让口两侧连线的夹角小于第一阈值角度;所述小腿杆伸入所述容纳腔内的一端开设有第一转轴孔,所述大腿杆通过所述第一转轴孔与所述小腿杆铰接,所述第一转轴孔的长度方向与所述转轴的长度方向相同,所述转轴与所述足端连线和所述转轴与所述第一转轴孔连线的夹角小于第二阈值角度。
8.其中,所述小腿杆开设有转轴通孔,所述转轴通孔内嵌装有滑动轴承,所述滑动轴承的内侧壁与所述转轴的外周面相接触。
9.优选地,所述壳体包括第一壳体板和第二壳体板,所述容纳腔由所述第一壳体板和所述第二壳体板拼接围成。
10.进一步地,所述第一壳体板开设有第一转轴避让孔,所述第二壳体板开设有第二
转轴避让孔,所述转轴的两端分别穿接于所述第一转轴避让孔和所述第二转轴避让孔。
11.优选地,所述转轴的两端还分别套接有一个推力轴承,所述推力轴承的两侧分别抵接于所述第一壳体板或所述第二壳体板位于所述容纳腔内的一侧以及所述小腿杆的侧面。
12.优选地,所述小腿杆在第一极限位置与第二极限位置之间往复摆动,当所述小腿杆位于所述第一极限位置时,所述小腿杆与所述避让口的一侧处于接触的临界状态,当所述小腿杆位于所述第二极限位置时,所述小腿杆与所述避让口的另一侧处于接触的临界状态。
13.优选地,所述第一阈值角度为220
°
,所述第二阈值角度为170
°
。
14.优选地,所述第一转轴孔内嵌装有第一向心轴承,所述大腿杆的一端凸设有第一转轴柱,所述第一转轴柱插接于所述第一向心轴承的内圈。
15.进一步地,所述容纳腔内还设有能沿自身轴向旋转的输出法兰,所述输出法兰开设有第二转轴孔,所述第二转轴孔内嵌装有第二向心轴承,所述大腿杆远离所述第一转轴柱的一端凸设有第二转轴柱,所述第二转轴柱插接于所述第二向心轴承的内圈。
16.再进一步地,所述仿生机器人腿部结构还包括驱动组件,所述驱动组件包括输出件主体和用于带动所述输出件主体的驱动电机,所述壳体还开设有与所述容纳腔连通的驱动避让孔,所述驱动电机安装于所述壳体外,所述输出件主体伸入所述驱动避让孔并连接于所述输出法兰。
17.本实用新型的有益效果:
18.本结构利用壳体通过转轴与小腿杆铰接以及小腿杆的一端与大腿杆铰接的方式,使得大腿杆能够在壳体的保护下还能正常带动小腿杆往复摆动,上述改进简化了腿部结构的同时还能够实现对大腿杆以及部分小腿杆的保护,第一阈值角度的设置限定了避让口的边界,提高了对大腿杆以及杆连接处的防护效果,极大地降低了安全隐患。利用第二阈值角度的选取,能通过对小腿杆结构的改进完成对仿生机器人腿部结构动作的优化,完成对小腿杆摆动极限位置的调整,进而能够实现对避让口边界的限定。利用转轴贯穿容纳腔的设置,能够有效地优化壳体的结构,实现了对小腿杆的定位,有效地降低了小腿杆脱离大腿杆的风险。
附图说明
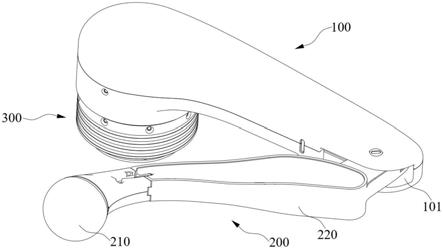
19.图1是本实用新型实施例提供的仿生机器人腿部结构的结构示意图;
20.图2是本实用新型实施例提供的仿生机器人腿部结构的爆炸图;
21.图3是本实用新型实施例提供的仿生机器人腿部结构的剖面图。
22.图中:
23.100、壳体;101、避让口;110、第一壳体板;111、第一接触端;112、第二接触端;113、第一转轴避让孔;120、第二壳体板;121、第三接触端;122、第四接触端;123、驱动避让孔;124、拼接孔;200、腿部构件;210、足端;220、小腿杆;221、转轴通孔;230、大腿杆;231、第一转轴柱;232、第二转轴柱;240、输出法兰;241、驱动配合孔;250、推力轴承;260、第一向心轴承;270、第二向心轴承;300、驱动组件;310、驱动电机;320、输出件主体;321、输出件凸起;400、转轴。
具体实施方式
24.为使本实用新型解决的技术问题、采用的技术方案和达到的技术效果更加清楚,下面将结合附图对本实用新型实施例的技术方案做进一步的详细描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
25.在本实用新型的描述中,除非另有明确的规定和限定,术语“相连”、“连接”、“固定”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
26.在本实用新型中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
27.下面结合附图并通过具体实施方式来进一步说明本实用新型的技术方案。
28.如图1-图3所示,本实施例提供了一种仿生机器人腿部结构,包括壳体100、腿部构件200和转轴400;壳体100设有容纳腔和与容纳腔连通的避让口101;腿部构件200包括大腿杆230、足端210和小腿杆220,大腿杆230位于容纳腔内,小腿杆220的一端固连有足端210,另一端穿过避让口101伸入容纳腔内;转轴400贯穿容纳腔,壳体100通过转轴400与小腿杆220铰接,避让口101两侧的长度方向均与转轴400的长度方向相同,转轴400分别与避让口101两侧连线的夹角小于第一阈值角度;小腿杆220伸入容纳腔内的一端开设有第一转轴孔,大腿杆230通过第一转轴孔与小腿杆220铰接,第一转轴孔的长度方向与转轴400的长度方向相同,转轴400与足端210连线和转轴400与第一转轴孔连线的夹角小于第二阈值角度。
29.本结构利用壳体100通过转轴400与小腿杆220铰接以及小腿杆220的一端与大腿杆230铰接的方式,使得大腿杆230能够在壳体100的保护下还能正常带动小腿杆220往复摆动,上述改进简化了腿部结构的同时还能够实现对大腿杆230以及部分小腿杆220的保护,第一阈值角度的设置限定了避让口101的边界,提高了对大腿杆230以及杆连接处的防护效果,极大地降低了安全隐患。利用第二阈值角度的选取,能通过对小腿杆220结构的改进完成对仿生机器人腿部结构动作的优化,完成对小腿杆220摆动极限位置的调整,进而能够实现对避让口101边界的限定。利用转轴400贯穿容纳腔的设置,能够有效地优化壳体100的结构,实现了对小腿杆220的定位,有效地降低了小腿杆220脱离大腿杆230的风险。
30.具体地,足端210为球形件,用于与地面相接触。
31.作为优选,小腿杆220开设有转轴通孔221,转轴通孔221内嵌装有滑动轴承,滑动轴承的内侧壁与转轴400的外周面相接触。转轴通孔221与转轴400的配合,保证了转轴400与小腿杆220铰接的效果,极大地规避了小腿杆220脱离摆动轨迹的情况发生,保障了仿生机器人腿部结构能够长期稳定运行。滑动轴承的设置保证了小腿杆220能够顺利地完成往
复摆动的动作,极大地降低了小腿杆220与转轴400磨损的风险,从而进一步的延长了仿生机器人腿部结构各构件的使用寿命。
32.在本实施例中,壳体100包括第一壳体板110和第二壳体板120,容纳腔由第一壳体板110和第二壳体板120拼接围成。第一壳体板110和第二壳体板120的设置降低了壳体100加工的难度,减少了生产的成本,方便了仿生机器人腿部结构拆装与维护操作的进行。
33.作为优选,第一壳体板110与第二壳体板120中的一个开设有多个公拼接件,另一个上开设有与公拼接件数量相同且一一对应的母拼接件,公拼接件能卡合于母拼接件。具体地,公拼接件为拼接柱,设于第一壳体板110位于容纳腔内的一侧,母拼接件为拼接孔124,设于第二壳体板120位于容纳腔内的一侧。上述设置保证了第一壳体板110与第二壳体板120拼接的稳定性,确保了仿生机器人腿部结构能够稳定运行。
34.进一步地,第一壳体板110开设有第一转轴避让孔113,第二壳体板120开设有第二转轴避让孔,转轴400的两端分别穿接于第一转轴避让孔113和第二转轴避让孔。第一转轴避让孔113与第二转轴避让孔的设置确保了转轴400在壳体100上的稳固连接,同时转轴400两端的穿接设置还能够提高第一壳体板110和第二壳体板120的拼接效果,进一步地降低了第一壳体板110和第二壳体板120因意外而相互脱离的风险。
35.具体地,第一阈值角度为220
°
,第二阈值角度为170
°
。第一阈值角度的设置限定了避让口101的大小,在保证小腿杆220能够正常往复运动的同时,还能尽可能地扩大壳体100的保护范围。第二阈值角度的选取有利于对运动轨迹进行优化,使得仿生机器人腿部结构的运动效率得以提高,同时还能对避让口101边界的限定产生影响。
36.小腿杆220在第一极限位置与第二极限位置之间往复摆动,当小腿杆220位于第一极限位置时,小腿杆220与避让口101的一侧处于接触的临界状态,当小腿杆220位于第二极限位置时,小腿杆220与避让口101的另一侧处于接触的临界状态。当小腿杆220位于极限位置时,小腿杆220与避让口101的两侧处于临界位置,上述内容进一步地对避让口101进行了限定,提高了壳体100对腿部构件200的保护效果的同时,还能有效地规避小腿杆220与壳体100发生刚性碰撞的情况,保证了腿部构件200的动作能够顺利完成,从而延长了仿生机器人腿部结构的使用寿命。
37.在本实施例中,转轴400的两端还分别套接有一个推力轴承250,推力轴承250的两侧分别抵接于第一壳体板110或第二壳体板120位于容纳腔内的一侧以及小腿杆220的侧面。推力轴承250的设置提高了小腿杆220与转轴400连接的稳定性,规避了小腿杆220沿转轴400径向移动的风险,确保了小腿杆220能够正常摆动的同时,还延长了仿生机器人腿部结构的使用寿命。
38.作为优选,避让口101由第一壳体板110与第二壳体板120拼接形成,当小腿杆220位于第一极限位置时,小腿杆220与第一壳体板110上的第一接触端111和第二壳体板120上的第三接触端121处于接触的临界状态,当小腿杆220位于第二极限位置时,小腿杆220与第一壳体板110上的第二接触端112和第二壳体板120上的第四接触端122处于接触的临界状态。具体地,小腿杆220伸入容纳腔内的部分横截面为长方形,避让口101在地面上的投影为长方形。
39.在本实施例中,小腿杆220伸入容纳腔内的一端开设有第一转轴孔,第一转轴孔内嵌装有第一向心轴承260,大腿杆230的一端凸设有第一转轴柱231,第一转轴柱231插接于
第一向心轴承260的内圈。
40.进一步地,容纳腔内还设有能沿自身轴向旋转的输出法兰240,输出法兰240开设有第二转轴孔,第二转轴孔内嵌装有第二向心轴承270,大腿杆230远离第一转轴柱231的一端凸设有第二转轴柱232,第二转轴柱232插接于第二向心轴承270的内圈。
41.输出法兰240与大腿杆230的铰接,方便了外部动力设备通过带动输出法兰240旋转的方式即能够实现腿部构件200的重复动作,第一向心轴承260与第二向心轴承270的设置,分别保证了小腿杆220与大腿杆230的相对转动以及输出法兰240与大腿杆230的相对转动能够顺利实现,保证了连接的稳定性,降低了彼此脱落的风险,还延长了仿生机器人腿部结构的使用寿命。
42.再进一步地,仿生机器人腿部结构还包括驱动组件300,驱动组件300包括输出件主体320和用于带动输出件主体320的驱动电机310,壳体100还开设有与容纳腔连通的驱动避让孔123,驱动电机310安装于壳体100外侧壁,输出件主体320伸入驱动避让孔123并连接于输出法兰240。驱动电机310安装于外部,输出件主体320伸入驱动避让孔123的设置简化了仿生机器人腿部结构的结构,减少了仿生机器人腿部结构占用的空间。
43.具体地,输出件主体320上凸设有至少两个输出件凸起321,输出法兰240上设有与输出件凸起321数量相同且一一对应的驱动配合孔241,输出件凸起321能插接于驱动配合孔241中。
44.进一步地,转轴通孔221与第一转轴孔间距为转轴通孔221与足端210间距的1/12~1/8。上述设置确保了小腿杆220能够顺利且高效地完成预定的动作,同时还避免了小腿杆220与大腿杆230在运动过程中相互重叠或干涉情况的发生。
45.在本实施例中,第一向心轴承260和第二向心轴承270均为深沟球轴承,在本实施例的其他实施方式中,也可以替换为滚针轴承。推力轴承250为滚针轴承。
46.显然,本实用新型的上述实施例仅仅是为了清楚说明本实用新型所作的举例,而并非是对本实用新型的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型权利要求的保护范围之内。