1.本实用新型涉及扫地机器人技术领域,具体是一种基于扫地机器人的滚轮传动装置。
背景技术:
2.扫地机器人,又称自动打扫机、智能吸尘、机器人吸尘器等,是智能家用电器的一种,能凭借一定的人工智能,自动在房间内完成地板清理工作。一般采用刷扫和真空方式,将地面杂物先吸纳进入自身的垃圾收纳盒,从而完成地面清理的功能。一般来说,将完成清扫、吸尘、擦地工作的机器人,也统一归为扫地机器人。扫地机器人利用滚轮传动装置在地面上进行移动,然而,现有技术中的滚轮传动装置的防滑性能有限,致使扫地机器人在移动的过程中常常会因为接触面过于光滑而出现滚轮打滑的问题,不仅影响滚轮传动装置的正常使用工作,而且也容易使得扫地机与家具等发生碰撞而损坏。
技术实现要素:
3.本实用新型的目的在于提供一种基于扫地机器人的滚轮传动装置,以解决上述背景技术中提出的问题。
4.为实现上述目的,本实用新型提供如下技术方案:
5.一种基于扫地机器人的滚轮传动装置,包括外护壳,所述外护壳的内腔设有内驱动组件,所述外护壳的侧边上连接有挡板,所述外护壳上贯穿设有第一轴孔,所述第一轴孔的内腔固定连接有第一轴承,所述第一轴承的内腔插接有转杆,所述转杆的一端延伸出外护壳的内腔,且所述转杆延伸出外护壳内部的一端外周套接有轮毂,所述轮毂的外周套接有滚轮轮胎,所述滚轮轮胎上均匀设有多组连接槽,且每组所述连接槽的内腔均设有防打滑部件,所述转杆的另一端穿过第一轴承并延伸至外护壳内部,所述外护壳的上表面上设有保护机构,所述外护壳上盖合有壳盖,所述壳盖靠近外护壳的一侧设有与外护壳相匹配的插槽,所述壳盖的外壁均匀连接有多组固定块,所述外护壳靠近滚轮轮胎的一侧连接有驱动电机,所述驱动电机的输出轴外周套接有第二轴承,所述外护壳靠近滚轮轮胎的一侧还贯穿设有与第二轴承相匹配的第二轴孔,且所述第二轴承固定连接于第二轴孔的内腔。
6.作为本实用新型进一步的方案:所述内驱动组件包括副齿轮,所述副齿轮的侧壁设有与其相配合作业的主齿轮,所述主齿轮的内腔插接有第一杆体,所述第一杆体的端部套接有从动齿轮,所述从动齿轮的一侧设有主动齿轮,所述主动齿轮的内腔插接有第二杆体,所述主动齿轮与从动齿轮的外周共同套接有同步带,所述第一杆体远离从动齿轮的一端套接有轴承座一。
7.作为本实用新型再进一步的方案:所述防打滑部件包括底接条形座,所述底接条形座上连接有防滑橡胶条,所述底接条形座远离防滑橡胶条的一侧连接有插入块,所述插入块上对称连接有两组弹性卡接橡胶条,所述弹性卡接橡胶条远离所连接插入块一侧的上下侧均设有过渡弧度,所述底接条形座的底部对称连接有两组定位插块。
8.作为本实用新型再进一步的方案:所述保护机构包括伸缩母杆,所述伸缩母杆的顶端内腔活动插接有伸缩子杆,所述伸缩子杆的顶端固定连接有固定座,所述伸缩子杆的外周套接有上固定座,所述伸缩母杆的外周套接有下固定座,所述伸缩子杆的外周还套有缓冲弹簧,且所述缓冲弹簧设置于下固定座与上固定座之间,所述缓冲弹簧的顶端固定连接于上固定座的底部,所述缓冲弹簧的底端固定连接于下固定座的顶部,所述伸缩母杆的底端与外护壳的上表面固定连接。
9.作为本实用新型再进一步的方案:所述驱动电机的输出轴与第二杆体的端部固定连接,所述轴承座一与外护壳的内腔固定连接,所述副齿轮套接固定在转杆延伸至外护壳内腔的一端外周。
10.作为本实用新型再进一步的方案:所述连接槽内腔的底部与插入块位置对应处设有凹陷槽,所述凹陷槽内腔的长宽尺寸大于插入块的长宽尺寸,所述插入块活动插接至凹陷槽的内腔之中,所述凹陷槽内腔的侧壁上与每组弹性卡接橡胶条位置对应处均设有与其相匹配作业的卡槽,且每组所述弹性卡接橡胶条活动插接至卡槽内腔,所述凹陷槽内腔的底部与每组定位插块位置对应处均设有与其相匹配的定位凹槽,且每组所述定位插块分别活动插接至各自所对应的定位凹槽内腔,所述底接条形座靠近防滑橡胶条一侧的表面与滚轮轮胎的外表面相齐平。
11.作为本实用新型再进一步的方案:所述驱动电机的外周套有电机外护壳,所述电机外护壳上盖合有盖板,且所述盖板上均匀贯穿设有多组散热槽,所述电机外护壳与外护壳的外壁固定连接。
12.作为本实用新型再进一步的方案:所述外护壳靠近壳盖的一侧胶黏固定有密封胶圈,所述外护壳靠近壳盖的一端活动插接至壳盖上的插槽内腔之中,所述固定块通过螺栓与外护壳固定连接。
13.与现有技术相比,本实用新型的有益效果是:
14.本扫地机器人的滚轮传动装置通过滚轮轮胎上均匀设置的多组防打滑部件而实现防打滑功能,不仅能够保障扫地机器人的滚轮传动装置能够正常使用,而且能够有效防止扫地机器人因打滑而发生碰撞损坏的情况;
15.在插入块插入至凹陷槽的过程中,每组弹性卡接橡胶条分别活动插接至各自所对应的卡槽内腔,使得防打滑部件得以快速卡接安装至匹配的连接槽内腔;
16.在内驱动组件驱动滚轮轮胎移动时,当滚轮轮胎碾压到杂物或者滚轮轮胎在凹凸不平的地面上行走时,行走过程中所产生的颠簸震动通过滚轮轮胎传递至外护壳处,再由外护壳将震动作用力传递至伸缩母杆处,当作用力传递至缓冲弹簧处时,通过缓冲弹簧对本扫地机器人的滚轮传动装置进行减震缓冲保护,可有效降低移动过程中的颠簸震动对本实用新型的损坏,有利于延长本实用新型的使用寿命。
附图说明
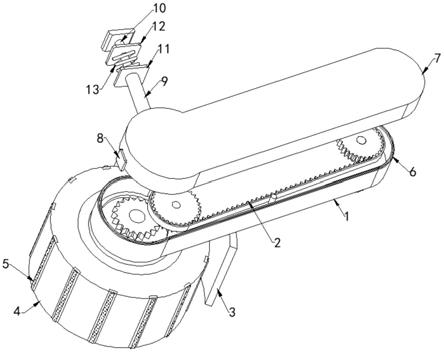
17.图1为一种基于扫地机器人的滚轮传动装置的结构示意图。
18.图2为一种基于扫地机器人的滚轮传动装置的结构示意图。
19.图3为一种基于扫地机器人的滚轮传动装置中的内驱动组件结构示意图。
20.图4为一种基于扫地机器人的滚轮传动装置中的防打滑部件结构示意图。
21.图5为一种基于扫地机器人的滚轮传动装置的侧视图。
22.图中:1、外护壳;2、内驱动组件;3、挡板;4、滚轮轮胎;5、防打滑部件;6、密封胶圈;7、壳盖;8、固定块;9、伸缩母杆;10、伸缩子杆;11、下固定座;12、上固定座;13、缓冲弹簧;14、轮毂;15、电机外护壳;16、驱动电机;17、副齿轮;18、主齿轮;19、从动齿轮;20、主动齿轮;21、同步带;23、底接条形座;24、防滑橡胶条;25、插入块;26、弹性卡接橡胶条;27、定位插块。
具体实施方式
23.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
24.请参阅图1~4,本实用新型实施例中,一种基于扫地机器人的滚轮传动装置,包括外护壳1,外护壳1的内腔设有内驱动组件2,外护壳1的侧边上连接有挡板3,外护壳1上贯穿设有第一轴孔,第一轴孔的内腔固定连接有第一轴承,第一轴承的内腔插接有转杆,转杆的一端延伸出外护壳1的内腔,且转杆延伸出外护壳1内部的一端外周套接有轮毂14,轮毂14的外周套接有滚轮轮胎4,滚轮轮胎4上均匀设有多组连接槽,且每组连接槽的内腔均设有防打滑部件5,转杆的另一端穿过第一轴承并延伸至外护壳1内部,外护壳1的上表面上设有保护机构,外护壳1上盖合有壳盖7,壳盖7靠近外护壳1的一侧设有与外护壳1相匹配的插槽,壳盖7的外壁均匀连接有多组固定块8,外护壳1靠近滚轮轮胎4的一侧连接有驱动电机16,驱动电机16的输出轴外周套接有第二轴承,外护壳1靠近滚轮轮胎4的一侧还贯穿设有与第二轴承相匹配的第二轴孔,且第二轴承固定连接于第二轴孔的内腔。
25.内驱动组件2包括副齿轮17,副齿轮17的侧壁设有与其相配合作业的主齿轮18,主齿轮18的内腔插接有第一杆体,第一杆体的端部套接有从动齿轮19,从动齿轮19的一侧设有主动齿轮20,主动齿轮20的内腔插接有第二杆体,主动齿轮20与从动齿轮19的外周共同套接有同步带21,第一杆体远离从动齿轮19的一端套接有轴承座一。
26.防打滑部件5包括底接条形座23,底接条形座23上连接有防滑橡胶条24,底接条形座23远离防滑橡胶条24的一侧连接有插入块25,插入块25上对称连接有两组弹性卡接橡胶条26,弹性卡接橡胶条26远离所连接插入块25一侧的上下侧均设有过渡弧度,底接条形座23的底部对称连接有两组定位插块27。
27.保护机构包括伸缩母杆9,伸缩母杆9的顶端内腔活动插接有伸缩子杆10,伸缩子杆10的顶端固定连接有固定座,伸缩子杆10的外周套接有上固定座12,伸缩母杆9的外周套接有下固定座11,伸缩子杆10的外周还套有缓冲弹簧13,且缓冲弹簧13设置于下固定座11与上固定座12之间,缓冲弹簧13的顶端固定连接于上固定座12的底部,缓冲弹簧13的底端固定连接于下固定座11的顶部,伸缩母杆9的底端与外护壳1的上表面固定连接。
28.驱动电机16的输出轴与第二杆体的端部固定连接,轴承座一与外护壳1的内腔固定连接,副齿轮17套接固定在转杆延伸至外护壳1内腔的一端外周。
29.连接槽内腔的底部与插入块25位置对应处设有凹陷槽,凹陷槽内腔的长宽尺寸大于插入块25的长宽尺寸,插入块25活动插接至凹陷槽的内腔之中,凹陷槽内腔的侧壁上与
每组弹性卡接橡胶条26位置对应处均设有与其相匹配作业的卡槽,且每组弹性卡接橡胶条26活动插接至卡槽内腔,凹陷槽内腔的底部与每组定位插块27位置对应处均设有与其相匹配的定位凹槽,且每组定位插块27分别活动插接至各自所对应的定位凹槽内腔,底接条形座23靠近防滑橡胶条24一侧的表面与滚轮轮胎4的外表面相齐平。
30.驱动电机16的外周套有电机外护壳15,电机外护壳15上盖合有盖板,且盖板上均匀贯穿设有多组散热槽,电机外护壳15与外护壳1的外壁固定连接。
31.外护壳1靠近壳盖7的一侧胶黏固定有密封胶圈6,外护壳1靠近壳盖7的一端活动插接至壳盖7上的插槽内腔之中,固定块8通过螺栓与外护壳1固定连接。
32.工作原理:
33.通过驱动电机16带动主动齿轮20旋转,当主动齿轮20旋转时,同步带21带动从动齿轮19转动,再由从动齿轮19带动第一杆体转动,当第一杆体转动时,主齿轮18跟随第一杆体旋转并带动副齿轮17转动,使得副齿轮17能够带动轮毂14转动,再由轮毂14带动滚轮轮胎4转动,使得旋转的滚轮轮胎4能够实现移动,在滚轮轮胎4移动的过程中,通过多组防滑橡胶条24对转动的滚轮轮胎4进行防打滑处理,使得本滚轮传动装置能够在光滑平面上运动而不打滑,当滚轮轮胎4碾压到杂物或者滚轮轮胎4在凹凸不平的地面上行走时,行走过程中所产生的颠簸震动通过滚轮轮胎4传递至外护壳1处,再由外护壳1将震动作用力传递至伸缩母杆9处,当作用力传递至缓冲弹簧13处时,通过缓冲弹簧13对本扫地机器人的滚轮传动装置进行减震缓冲保护,在插入块25插入至凹陷槽的过程中,每组弹性卡接橡胶条26分别活动插接至各自所对应的卡槽内腔,使得防打滑部件5得以快速卡接安装至匹配的连接槽内腔。
34.该扫地机机器人,包含扫地、拖地功能,
35.其核心部件包含:吸尘装置、清洗装置、污水回收装置;
36.运作原理:1.通过智能扫地机的吸尘装置进行大颗粒及毛发碎屑等杂志的吸收,吸尘装置最大的技术特征在于利用硅胶的弹性形成可伸缩的吸盘,始终保持对地面的压力,确保吸尘效率,当遇到固定物体时,硅胶会变形,形成上升特点,平常则对地面形成一定压力。
37.2.前端吸地装置吸收后,则清洗装置同时通过管道出水管道对滚筒进行喷水,喷水后滚筒逆时针旋转,清洗装置的后端安装一个刮板,把滚筒的污水进行机械压缩回收,刮板下设置回收槽,技术特征在于清洗装置的出水管道为激光打孔,孔密度高且细小,水珠能均匀且细密附着在滚筒上,后通过机械回收原理进行污水回收。
38.3.污水回收装置设置为两个槽口进行回收,将刮板挂取的污水通过平面的回收板进入临时的污水回收槽,临时污水回收槽设置过滤片,过滤片可人工进行一次性替换,将大颗粒物体通过过滤片清除,临时污水槽设置管道,管道通过泵带动将污水抽至最终污水槽完成回收功能。
39.尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。