1.本实用新型涉及自动清洁设备技术领域,特别是涉及自清洁扫地机器人及其升降驱动装置。
背景技术:
2.在日常生活中,特别是居家生活,越来越多的家庭会使用扫地机来清洁地面。目前,市场上的扫地机通常是在扫地机底部外挂一个棉抹布,在抹布上方安装一个水箱,扫地机在拖地时,水箱内的水会滴到抹布上,进而在扫地机移动的过程中,被打湿的抹布会与地面来回摩擦,起到对地面清洁的效果。
3.滚筒与地面之间的距离通常是固定设置,这就造成不能根据地面的具体情况选择合适的拖地压力,对地面的清洁效果不佳。
技术实现要素:
4.基于此,有必要针对无法自适应性驱动调节滚筒与地面距离的问题,提供一种能够平稳驱动滚筒升降的自清洁扫地机器人及其升降驱动装置。
5.一种扫地机升降驱动装置,包括:
6.基座,内部中空且沿其长轴方向开设有活动槽;
7.第一配合件,沿所述基座的长轴方向设于所述基座内;
8.第二配合件,沿所述基座的长轴方向设于所述基座内,且与所述第一配合件间隔;
9.升降操作件,滑动地设于所述第一配合件上,所述升降操作件包括相对地第一端部及第二端部,所述第一端部上突出设有操作臂,所述操作臂由所述活动槽伸出,所述第二端部与所述第二配合件滑动连接,使所述升降操作件能够水平滑动;以及
10.驱动件,设于所述基座内,且所述驱动件能够驱动所述升降操作件于所述第一配合件、所述第二配合件上来回滑动。
11.上述扫地机升降驱动装置,升降操作件有两个间隔位置的滑动配合结构设置,再配合驱动件的驱动,能够使得驱动件驱动升降操作件在基座内沿基座长轴方向滑动,保证升降操作件一直保持水平滑动,搭配滚筒组件上的倾斜设置的升降接触部,实现操作臂与升降接触部平稳抵接将滚筒升起的操作。
12.在其中一个实施例中,还包括固定设于所述第一配合件上的传动组件,且所述传动组件与所述驱动件的输出轴联动,所述驱动件能够驱动所述传动组件带动所述第一配合件旋转,所述第一配合件为螺杆,所述升降操作件与所述第一配合件螺纹连接。
13.在其中一个实施例中,所述驱动件为电机,所述传动组件包括主动齿轮及被动齿轮,所述主动齿轮设于所述驱动件的输出端上,所述被动齿轮固定设于所述第一配合件上,所述被动齿轮与所述主动齿轮啮合。
14.在其中一个实施例中,所述传动组件还包括中间齿轮,所述中间齿轮分别与所述主动齿轮、所述被动齿轮啮合。
15.在其中一个实施例中,所述传动组件还包括轴承及沿所述基座的长轴方向延伸的转轴,所述中间齿轮通过所述轴承转动设于所述转轴上。
16.在其中一个实施例中,所述第一配合件包括圆柱杆体,且圆柱杆体的外周面上截取形成至少一个截平面,所述被动齿轮套设于所述圆柱杆体上,且所述被动齿轮内设有与所述截平面匹配的平台部。
17.在其中一个实施例中,所述操作臂呈平板状,所述升降操作件的中部与所述第一配合件滑动连接。
18.在其中一个实施例中,所述第二配合件为滑杆,所述升降操作件的第二端部开设有配合孔,所述滑杆穿设所述配合孔。
19.在其中一个实施例中,还包括控制主板以及设于所述基座内的第一限位检测件、第二限位检测件,所述第一限位检测件、所述第二限位检测件及所述驱动件与所述控制主板电连接,所述第一限位检测件、所述第二限位检测件分别位于所述第一配合件的相对两端,且能够感应检测所述升降操作件的位置,所述驱动件根据所述第一限位检测件或者所述第二限位检测件对所述升降操作件的位置检测信号控制所述驱动件工作。
20.本实用新型还提出了一种自清洁扫地机器人,包括:滚筒组件及如上所述的扫地机升降驱动装置,所述滚筒组件包括升降接触部,所述操作臂与所述升降接触部联动,所述升降操作件驱动所述滚筒组件升降。
附图说明
21.图1为本实用新型的扫地机升降驱动装置一实施例的结构示意图;
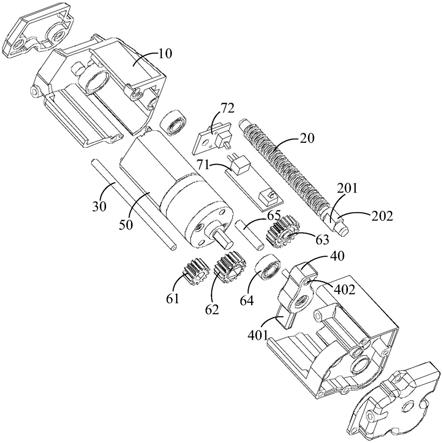
22.图2为图1所示扫地机升降驱动装置的分解示意图;
23.图3为本实用新型的升降操作件滑动配合结构示意图;
24.图4为图1所示扫地机升降驱动装置的剖视图;
25.图5为本实用新型的升降操作件与被动齿轮一实施例的结构示意图。
26.附图中,各标号所代表的部件列表如下:
27.100、扫地机升降驱动装置;10、基座;101、活动槽;20、第一配合件;201、圆柱杆体;202、截平面;30、第二配合件;40、升降操作件;401、操作臂;402、配合孔;50、驱动件;61、主动齿轮;62、被动齿轮;621、平台部;63、中间齿轮;64、轴承;65、转轴;71、第一限位检测件;72、第二限位检测件。
具体实施方式
28.为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合附图对本实用新型的具体实施方式做清楚、完整的描述。显然,以下描述的具体细节只是本实用新型的一部分实施例,本实用新型还能够以很多不同于在此描述的其他实施例来实现。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动的前提下,所获得的所有其他实施例,均属于本实用新型的保护范围。
29.需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
30.除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。本文中在本实用新型的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本实用新型。
31.请参阅图1及图2,在一实施例中,一种扫地机升降驱动装置100包括:基座10、第一配合件20、第二配合件30、升降操作件40以及驱动件50。基座10内部中空且沿其长轴方向开设有活动槽101,基座10的长轴方向即基座10的长度方向。第一配合件20沿基座10的长轴方向设于基座10内。第二配合件30也沿基座10的长轴方向设于基座10内,且第二配合件30与第一配合件20间隔。升降操作件40滑动地设于第一配合件20上,升降操作件40包括相对地第一端部及第二端部,第一端部上突出设有操作臂401,操作臂401由活动槽101伸出,第二端部与第二配合件30滑动连接,使升降操作件40能够水平滑动。驱动件50安装设于基座10内,且驱动件50能够驱动升降操作件40于第一配合件20、第二配合件30上来回滑动。
32.该扫地机升降驱动装置100的升降操作件40有两个间隔位置的滑动配合结构设置,再配合驱动件50的驱动,能够使得驱动件50驱动升降操作件40在基座10内沿基座10长轴方向滑动,保证升降操作件40一直保持水平滑动,搭配滚筒组件上的倾斜设置的升降接触部,实现操作臂401与升降接触部平稳抵接将滚筒升起的操作。
33.请参阅图2及图3,在一实施方式中,扫地机升降驱动装置100还包括固定设于第一配合件20上的传动组件。传动组件与驱动件50的输出轴联动,驱动件50能够驱动传动组件带动第一配合件20旋转,请参阅图3及图4,第一配合件20为螺杆,升降操作件40与第一配合件20螺纹连接。
34.由于升降操作件40的第二端部与第二配合件30滑动连接,保证第一配合件20转动时,第一配合件20转动使得升降操作件40能够顺着第一配合件20来回滑动,而不是升降操作件40一直跟随着第一配合件20转动。
35.请参阅图3,在实际操作中,驱动件50可以是减速电机。传动组件包括主动齿轮61及被动齿轮62。主动齿轮61设于驱动件50的输出端上,被动齿轮62固定设于第一配合件20上,被动齿轮62与主动齿轮61啮合。通过减速电机转动驱动,再配合螺杆驱动升降操作件40滑动,驱动的控制精度更高。
36.请继续参阅图3,进一步地,传动组件还包括中间齿轮63,中间齿轮63分别与主动齿轮61、被动齿轮62啮合。保证减速电机驱动螺杆转动的稳定性。具体地,传动组件还包括轴承64及沿基座10的长轴方向延伸的转轴65,轴承64安装设于中间齿轮63内,且套设于转轴65上。
37.请参阅图5,在第一配合件20与被动齿轮62的固定连接结构中,第一配合件20包括圆柱杆体201,且圆柱杆体201的外周面上截取形成至少一个截平面202。被动齿轮62套设于圆柱杆体201上,且被动齿轮62内设有与截平面202匹配的平台部621,能够保证被动齿轮62套设于第一配合件20上且不会发生转动。
38.请参阅图3,在升降操作件40的一具体结构中,升降操作件40的中部呈圆盘状,且升降操作件40的中部与第一配合件20螺纹连接,形成滑动配合。操作臂401的一端与圆盘状中部连接,另一端伸出基座10的活动槽101,操作臂401可以呈平板状。
39.在升降操作件40与第二配合件30的一实施结构中,第二配合件30为滑杆,升降操
作件40的第二端部开设有配合孔402,滑杆穿设配合孔402,形成升降操作件40与第二配合件30的滑动连接。
40.请再次参阅图3,在另一实施例中,扫地机升降驱动装置100还包括控制主板以及设于基座10内的第一限位检测件71、第二限位检测件72。第一限位检测件71、第二限位检测件72及驱动件50与控制主板电连接,第一限位检测件71、第二限位检测件72分别位于第一配合件20的相对两端,且能够感应检测升降操作件40的位置,驱动件50根据第一限位检测件71或者第二限位检测件72对升降操作件40的位置检测信号控制驱动件50工作。
41.实际操作中,例如,第一配合件20的一端为起始位置,第一限位检测件71检测到升降操作件40位于起始位置时,会发送检测信号给控制主板,控制主板控制减速电机驱动升降操作件40滑动,当升降操作件40滑动至第一配合件20的另一端,即可以称为终止位置时,第二限位检测件72检测到升降操作件40,并发送检测信号给控制主板,控制主板控制减速电机停止驱动升降操作件40滑动。
42.本实用新型还提出了一种自清洁扫地机器人,包括:滚筒组件及如上所述的扫地机升降驱动装置100,滚筒组件包括升降接触部,操作臂401与升降接触部联动,升降操作件40驱动滚筒组件升降。
43.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
44.以上所述实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形、替换及改进,这些都应涵盖在本实用新型的保护范围之内。因此,本实用新型专利的保护范围应以权利要求为准。