1.本技术涉及自动控制领域,尤其涉及一种扫地机器人的控制方法、装置及扫地机器人。
背景技术:
2.随着传感器技术的发展,扫地机器人逐渐成为一种常见的家用清洁设备。家庭环境中,地板的材质主要为木质和地砖,地板之间存在拼合缝隙,扫地机器人经过拼合缝隙时发生颠簸。对于矩形地板来说,扫地机器人沿短边方向工作会经过较多的拼合缝隙(相比于沿长边方向),导致颠簸次数过多。颠簸的过程中,扫地机器人会产生噪音,同时容易损坏机械结构的寿命。
技术实现要素:
3.本技术提供一种减少颠簸的扫地机器人的控制方法、装置及扫地机器人。
4.具体而言,本技术提供一种扫地机器人的控制方法,所述扫地机器人包括行走模块及清洁模块,所述控制方法包括:控制行走模块沿第一方向运动,获取第一方向上单位长度内的地板缝隙的数量;将所述第一方向上单位长度内的地板缝隙的数量与第一预设数量比较;若第一方向上单位长度内的地板缝隙的数量大于第一预设数量,控制行走模块以第一方式循环行走:沿第二方向行走第一预设距离,沿第一方向行走第二预设距离,沿第二方向的反方向行走第三预设距离,沿第一方向行走第四预设距离;若第一方向上单位长度内的地板缝隙的数量不大于第一预设数量,控制行走模块以第二方式循环行走:沿第一方向行走第一预设距离,沿第二方向行走第二预设距离,沿第一方向的反方向行走第三预设距离,沿第二方向行走第四预设距离;其中所述第二方向垂直于第一方向,所述第一预设距离大于第二预设距离,所述第三预设距离大于第四预设距离,所述清洁模块在循环行走过程中进行清洁工作。
5.进一步的,所述第一预设距离等于第三预设距离,所述第二预设距离等于第四预设距离。
6.进一步的,所述第一方向平行于地板的长度方向或宽度方向。
7.进一步的,所述获取第一方向上的地板缝隙的数量的步骤,包括:记录行走模块沿第一方向运动的起始位置和结束位置,获得起始位置和结束位置之间的距离;获取所述扫地机器人的颠簸次数;对所述颠簸次数和距离进行求商计算,获得第一方向上单位长度内的地板缝隙的数量。
8.进一步的,所述控制方法包括:在循环行走的过程中,记录行走模块在相邻两次颠簸之间的行走距离;将所述行走距离与预设尺寸进行求差计算;若行走距离与预设尺寸之差大于预设值;对所述行走模块的行走方向进行矫正。
9.进一步的,所述行走模块包括两个主动轮,对所述行走模块的行走方向进行矫正的步骤,包括:确定扫地机器人在上一次颠簸时的首先向下倾斜的一侧的主动轮;控制行走
模块的行走方向朝向所述一侧的主动轮调整。
10.本技术提供另一种扫地机器人的控制方法,所述扫地机器人包括行走模块及清洁模块,所述控制方法包括:控制行走模块沿第一方向运动预设长度,获取通过的地板缝隙的数量;将通过的地板缝隙的数量与第二预设数量比较;若通过的地板缝隙的数量大于第二预设数量,控制行走模块以第一方式循环行走:沿第二方向行走第一预设距离,沿第一方向行走第二预设距离,沿第二方向的反方向行走第三预设距离,沿第一方向行走第四预设距离;若通过的地板缝隙的数量不大于第二预设数量,控制行走模块以第二方式循环行走:沿第一方向行走第一预设距离,沿第二方向行走第二预设距离,沿第一方向的反方向行走第三预设距离,沿第二方向行走第四预设距离;其中所述第二方向垂直于第一方向,所述第一预设距离大于第二预设距离,所述第三预设距离大于第四预设距离,所述清洁模块在循环行走过程中进行清洁工作。
11.本技术还提供一种扫地机器人的控制方法,所述扫地机器人包括行走模块及清洁模块,所述控制方法包括:控制行走模块沿第一方向运动;获取连续两次颠簸之间行走模块的行走距离;将所述行走距离与地板的长度或宽度进行对比;若行走距离等于地板的宽度,控制行走模块以第一方式循环行走:沿第二方向行走第一预设距离,沿第一方向行走第二预设距离,沿第二方向的反方向行走第三预设距离,沿第一方向行走第四预设距离;若行走距离等于地板的长度,控制行走模块以第二方式循环行走:沿第一方向行走第一预设距离,沿第二方向行走第二预设距离,沿第一方向的反方向行走第三预设距离,沿第二方向行走第四预设距离;所述第二方向垂直于第一方向,所述清洁模块在循环行走过程中工作。
12.另一方面,本技术提供一种装置,所述装置包括:行走模块、检测模块、比较模块及控制模块,比较模块与所述检测模块通讯连接,控制模块分别与行走模块及比较模块通讯连接,检测模块用于获取颠簸次数;比较模块将第一方向上单位长度内的地板缝隙的数量与第一预设数量比较;控制模块用于控制所述行走模块行走,且配置为根据所述比较模块的比较结果,控制行走模块沿弓形路径行走,所述第一方向为弓形的长边的延伸方向或短边的延伸方向。
13.又一方面,本技术还提供一种扫地机器人,所述扫地机器人包括如前所述的装置。
14.本技术通过确定拼合缝隙较少的方向,控制扫地机器人进行弓形清扫,有利于降低扫地机器人清扫过程的颠簸次数,从而减少工作噪声,同时延长扫地机器人的使用寿命。
附图说明
15.图1是本技术扫地机器人的控制方法一个实施例的流程示意图。
16.图2是扫地机器人以第一方式循环行走的示意图。
17.图3是扫地机器人以第一方式循环行走的示意图。
18.图4是本技术扫地机器人的控制方法另一个实施例的流程示意图。
19.图5是本技术扫地机器人的控制方法又一个实施例的流程示意图。
20.图6是本技术装置的一个实施例的模块示意图。
具体实施方式
21.这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及
附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施例并不代表与本技术相一致的所有实施例。
22.在本技术使用的术语是仅仅出于描述特定实施例的目的,而非旨在限制本技术。除非另作定义,本技术使用的技术术语或者科学术语应当为本技术所属领域内具有一般技能的人士所理解的通常意义。本技术中使用的“第一”“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。同样,“一个”或者“一”等类似词语也不表示数量限制,而是表示存在至少一个。“多个”或者“若干”表示两个及两个以上。除非另行指出,“前部”、“后部”、“下部”和/或“上部”等类似词语只是为了便于说明,而并非限于一个位置或者一种空间定向。“包括”或者“包含”等类似词语意指出现在“包括”或者“包含”前面的元件或者物件涵盖出现在“包括”或者“包含”后面列举的元件或者物件及其等同,并不排除其他元件或者物件。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,而且可以包括电性的连接,不管是直接的还是间接的。在本技术说明书和所附权利要求书中所使用的单数形式的“一种”、“所述”和“该”也旨在包括多数形式,除非上下文清楚地表示其他含义。还应当理解,本文中使用的术语“和/或”是指并包含一个或多个相关联的列出项目的任何或所有可能组合。
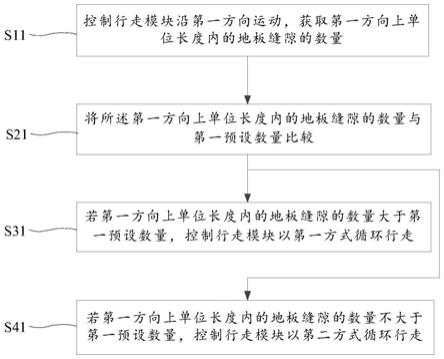
23.本技术提供一种扫地机器人的控制方法,所述扫地机器人包括行走模块及清洁模块,请结合图1,本实施例的控制方法包括:
24.步骤s11:控制行走模块沿第一方向运动,获取第一方向上单位长度内的地板缝隙的数量。可选的,单位长度可以从1m、1.5m、2m等尺寸中选择,但需要保证单位长度大于为地板长度。第一方向平行地板的长度方向或宽度方向。通常,地板的长度方向或宽度方向分别为房间的长度方向和宽度方向。地板缝隙的数量可通过扫地机器人的姿态传感器来获取,例如陀螺仪、加速度计等。
25.步骤s21:将所述第一方向上单位长度内的地板缝隙的数量与第一预设数量比较。第一预设数量可以是单位长度内的地板缝隙的最大值和单位长度内的地板缝隙的最小值之间的一个整数。
26.步骤s31:若第一方向上单位长度内的地板缝隙的数量大于第一预设数量,控制行走模块以第一方式循环行走:沿第二方向行走第一预设距离,沿第一方向行走第二预设距离,沿第二方向的反方向行走第三预设距离,沿第一方向行走第四预设距离。
27.可选的,获取第一方向上的地板缝隙的数量的步骤,包括:记录行走模块沿第一方向运动的起始位置和结束位置,获得起始位置和结束位置之间的距离;获取所述扫地机器人的颠簸次数;对所述颠簸次数和距离进行求商计算,获得第一方向上单位长度内的地板缝隙的数量。
28.步骤s41:若第一方向上单位长度内的地板缝隙的数量不大于第一预设数量,控制行走模块以第二方式循环行走:沿第一方向行走第一预设距离,沿第二方向行走第二预设距离,沿第一方向的反方向行走第三预设距离,沿第二方向行走第四预设距离。
29.其中所述第二方向垂直于第一方向,所述第一预设距离大于第二预设距离,所述第三预设距离大于第四预设距离,所述清洁模块在循环行走过程中进行清洁工作,以实现弓字形清扫。可选的,所述第一预设距离等于第三预设距离,所述第二预设距离等于第四预设距离,使得扫地机器人沿规则的弓形行走并进行清扫工作。
30.举例来说,单位长度为1米,地板的长度为900毫米,宽度为90毫米。请结合图2,若单位长度内的缝隙数量为12个时,可判定第一方向x1(起始运动方向)为地板的宽度方向,控制行走模块以第一方式循环行走,其中第一方向x1为弓形的短边方向,第二方向y1为弓形的长边方向。请结合图3,若单位长度内的缝隙数量为2个时,可判定第一方向x2为地板的长度方向,控制行走模块以第二方式循环行走,其中第一方向x2为弓形的长边方向,第二方向y2为弓形的短边方向;预设数量可选择2和12之间的任一整数,例如5。
31.可选的,所述控制方法还包括:在循环行走的过程中,记录行走模块在相邻两次颠簸之间的行走距离;将所述行走距离与预设尺寸进行求差计算;若行走距离与预设尺寸之差大于预设值;对所述行走模块的行走方向进行矫正。行走距离增大主要是因为行走方向发生了偏移,导致相邻两次颠簸的实际行走距离大于相邻两个地板缝隙的距离。可选的,预设值可选择地板的长度,且允许存在一定的误差,例如2%。
32.行走模块包括两个主动轮,来实现前进、后退及转向。具体来说,对行走方向进行矫正通过以下步骤来实现:确定扫地机器人在上一次颠簸时首先向下倾斜(亦即先到达地板缝隙)的一侧的主动轮;控制行走模块的行走方向朝向所述一侧的主动轮调整。在调整后可再次判断行走方向是否偏移并进行矫正,直至行走方向基本平行(允许5
°
的误差)于地板的长度方向。
33.请结合图4,在另一实施例中,本技术还提供一种扫地机器人的控制方法,其包括:
34.步骤s12:控制行走模块沿第一方向运动预设长度,获取通过的地板缝隙的数量。
35.步骤s22:将通过的地板缝隙的数量与第二预设数量比较,第二预设数量为预设长度范围内地板缝隙数的最大值(第一方向地板的宽度方向)和最小值(第一方向地板的长度方向)之间的一个数值。
36.步骤s32:若通过的地板缝隙的数量大于第二预设数量,控制行走模块以第一方式循环行走:沿第二方向行走第一预设距离,沿第一方向行走第二预设距离,沿第二方向的反方向行走第三预设距离,沿第一方向行走第四预设距离;
37.步骤s42:若通过的地板缝隙的数量不大于第二预设数量,控制行走模块以第二方式循环行走:沿第一方向行走第一预设距离,沿第二方向行走第二预设距离,沿第一方向的反方向行走第三预设距离,沿第二方向行走第四预设距离。
38.其中,所述第二方向垂直于第一方向,所述第一预设距离大于第二预设距离,所述第三预设距离大于第四预设距离,所述清洁模块在循环行走过程中进行清洁工作。
39.请结合图5,在又一实施例中,扫地机器人的控制方法包括:
40.步骤s13:控制行走模块沿第一方向运动,获取连续两次颠簸之间行走模块的行走距离;
41.步骤s23:将所述行走距离与地板的长度或宽度进行对比;
42.步骤s33:若行走距离等于地板的宽度,控制行走模块以第一方式循环行走:沿第二方向行走第一预设距离,沿第一方向行走第二预设距离,沿第二方向的反方向行走第三预设距离,沿第一方向行走第四预设距离。
43.步骤s43:若行走距离等于地板的长度,控制行走模块以第二方式循环行走:沿第一方向行走第一预设距离,沿第二方向行走第二预设距离,沿第一方向的反方向行走第三预设距离,沿第二方向行走第四预设距离;
44.其中,所述第二方向垂直于第一方向,所述第一预设距离大于第二预设距离,所述第三预设距离大于第四预设距离,所述清洁模块在循环行走过程中进行清洁工作。
45.另一方面,本技术还提供一种装置,请结合图6,所述装置包括行走模块1、检测模块2、比较模块3及控制模块4,比较模块3与检测模块2通讯连接,控制模块4分别与行走模块1及比较模块2通讯连接,“通讯连接”可理解为两个元件之间可以形成通讯。所述检测模块2用于获取颠簸次数,所述比较模块3将第一方向上单位长度内的地板缝隙的数量与第一预设数量比较,控制模块4用于控制所述行走模块行走,且配置为根据所述比较模块的比较结果,控制行走模块沿弓形路径行走,所述第一方向为弓形的长边的延伸方向或短边的延伸方向。
46.可选的,行走模块1为扫地机器人的两个主动轮,检测模块2为扫地机器人的姿态传感器,比较模块3及控制模块4集成于扫地机器人的控制板。
47.又一方面,本技术还提供一种扫地机器人,所述扫地机器人包括所述装置。
48.本技术通过确定拼合缝隙较少的方向,控制扫地机器人进行弓形清扫,有利于降低扫地机器人清扫过程的颠簸次数,从而减少工作噪声,同时延长扫地机器人的使用寿命。
49.以上所述仅是本技术的较佳实施例而已,并非对本技术做任何形式上的限制,虽然本技术已以较佳实施例揭露如上,然而并非用以限定本技术,任何熟悉本专业的技术人员,在不脱离本技术技术方案的范围内,当可利用上述揭示的技术内容做出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本技术技术方案的内容,依据本技术的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本技术技术方案的范围内。