1.本实用新型涉及陶瓷胚体自动削模领域,特别是一种陶瓷注浆自动取胚切口生产线。
背景技术:
2.陶瓷胚体削模又叫削水口,其为在陶土经模具注浆成型后,通过人工根据所需的图形削掉多余的部分而形成。现阶段,陶瓷厂家都以手工削模为主,而流水线作业的模式需雇用较多人力,这样既浪费人力和大量的人工成本、效率低以及易造成破损,所以急需一种全自动的机械手代替人工削模,而且能适应流水线作业,以解决人工削模效率低,成本高的问题。
技术实现要素:
3.针对现有技术中存在的不足之处,本实用新型提供一种陶瓷注浆自动取胚切口生产线,采用如下技术方案:
4.本实用新型提供一种陶瓷注浆自动取胚切口生产线,包括依次连接的开模装置、松紧装置、传动装置和削水口装置,所述开模装置包括模具拉出机构和与模具拉出机构连接的取模机构,所述取模机构包括控制箱、被控制箱控制的第一伸缩杆和若干个取模治具;所述松紧装置为带有第二伸缩杆的气缸;所述传动装置包括彼此连接的第一传送带和第二传送带,所述第一传送带用于输送模具,所述第二传送带用于输送陶瓷胚体;所述削水口装置包括位于第二传送带一侧的光电感应器、与光电感应器通过支撑架连接的图像传感器、用于夹取陶瓷胚体的柔性夹爪和与柔性夹爪连接并用于控制柔性夹爪的机械手。
5.进一步地,所述第一传送带由模具架相嵌连接构成,所述模具架包括底座、与底座连接的连杆机构和与连杆机构连接的松紧杆,所述松紧杆底部设有滑动块,所述第二传送带为皮带输送带。
6.进一步地,所述取模治具包括滑动杆、用于连接滑动杆和推动块的连接板、与连接板连接的推动块、与推动块连接的辅助板、若干个设置于辅助板上的吸盘及定位销,所述定位销设置于吸盘两侧,并固定于辅助板上;
7.所述吸盘由螺栓与辅助板连接,吸盘用于吸住模具,定位销用于嵌入模具的凹槽内,防止取模具时滑动错位;
8.所述滑动杆上设置有凹槽,用于使连接板在凹槽内移动,以带动推动块和辅助板,使辅助板上的吸盘与定位销远离或靠近模具。
9.进一步地,所述吸盘材质为丁腈橡胶、氯丁橡胶、氯基橡胶和聚氨酯橡胶中的任一种。
10.进一步地,所述模具拉出机构包括夹具、与夹具上下连接的托板和与夹具连接的推动杆,所述夹具用于夹住模具,放置于托板上。
11.进一步地,所述传动装置为电动传动。
12.进一步地,所述机械手为若干个关节形式。
13.进一步地,所述第一伸缩杆底部连接圆盘顶部,圆盘底部连接取模治具,所述圆盘与取模治具的连接为可拆卸式,其用于根据需求调整取模治具的数量。
14.与现有技术相比,本实用新型具有的有益效果为:
15.该流水线采用先进的技术组合,配合成熟的工艺,打造陶瓷行业一流的全自动生产线,从开模、削水口全部自动化,只需要1到2人负责定时取料。更换产品的时候只需要修改程序,重新牵引示教,调整开模治具即可,真正实现高效、便捷生产。其节省了大量的人工开模、削胚体工序的成本,避免了人工操作对陶瓷胚体的损坏,取得降本增效、高品质的效果。
附图说明
16.下面结合附图对本实用新型进行详细的说明。
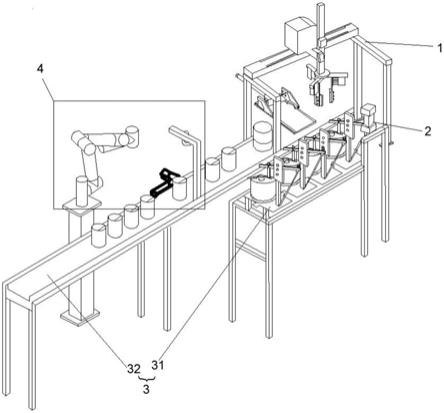
17.图1为本实用新型的实施例全自动陶瓷胚体削模流水线结构示意图;
18.图2为本实用新型的实施例开模装置结构示意图;
19.图3为本实用新型的实施例取模治具结构示意图;
20.图4为本实用新型的实施例模具架结构示意图;
21.图5为本实用新型的实施例削水口装置结构示意图。
22.开模装置-1,模具拉出机构-10,取模机构-11,控制器-110,第一伸缩杆-111,取模治具-112,滑动杆-1120,连接板-1121,推动块-1122,辅助板-1123,吸盘-1124,定位销-1125,松紧装置-2,传动装置-3,第一传送带-31,模具架-310,底座-3100,连杆机构-3101,松紧杆-3102,第二传送带-32,削水口-4,光电感应器-41,图像传感器-42,柔性夹爪-43,机械手-44。
具体实施方式
23.现结合附图详细描述根据本实用新型的实施例。
24.参照图1至图5,根据本实用新型的实施例的一种陶瓷注浆自动取胚切口生产线,包括依次连接的开模装置(1)、松紧装置(2)、传动装置(3)和削水口装置(4),所述开模装置(1)包括模具拉出机构(10)和与模具拉出机构(10)连接的取模机构(11),所述取模机构(11)包括控制箱(110)、被控制箱(110)控制的第一伸缩杆(111)和若干个取模治具(112);所述松紧装置(2)为带有第二伸缩杆的气缸;所述传动装置(3)包括第一传送带(31)和第二传送带(32),所述第一传送带(31)用于输送模具,所述第二传送带(32)用于输送陶瓷胚体;所述削水口装置(4)包括位于第二传送带(32)一侧的光电感应器(41)、与光电感应器通过支撑架连接的图像传感器(42)、用于夹取陶瓷胚体的柔性夹爪(43)和与柔性夹爪(43)连接并用于控制柔性夹爪(43)的机械手(44)。
25.具体地,所述第一传送带(31)由模具架(310)相嵌连接构成,所述模具架(310)包括底座(3100)、与底座(3100)连接的连杆机构(3101)和与连杆机构(3101)连接的松紧杆(3102),所述松紧杆(3102)底部设有滑动块,所述第二传送带(32)为皮带输送带。
26.具体地,所述取模治具(112)包括滑动杆(1120)、用于连接滑动杆(1120)和推动块(1122)的连接板(1121)、与连接板(1121)连接的推动块(1122)、与推动块(1122)连接的辅
助板(1123)、3个设置于辅助板(1123)上的吸盘(1124)及4个定位销(1125),所述4个定位销(1125)分别设置于吸盘(1124)两侧,并固定于辅助板(1123)上;
27.所述吸盘(1124)由螺栓与辅助板(1123)连接,吸盘(1124)用于吸住模具,定位销(1125)用于嵌入模具的凹槽内,防止取模具时滑动错位;
28.所述滑动杆(1120)上设置有凹槽,用于使连接板(1121)在凹槽内移动,以带动推动块(1122)和辅助板(1123),使辅助板(1123)上的吸盘(1124)与定位销(1125)远离或靠近模具。
29.具体地,所述吸盘(1124)材质为丁腈橡胶。
30.具体地,所述模具拉出机构(10)包括夹具(101)、与夹具(101)上下连接的托板(102)和与夹具(101)连接的推动杆(103),所述夹具(101)用于夹住模具,放置于托板(102)上。
31.具体地,所述传动装置(3)为电动传动。
32.具体地,所述机械手(44)为6关节形式。
33.具体地,所述第一伸缩杆(111)底部连接圆盘顶部,圆盘底部连接取模治具(112),所述圆盘与取模治具(112)的连接为可拆卸式,用于调整取模治具(112)的数量。
34.该生产线工作原理为,模具注浆完毕后,于第一传送带(31)输送,此时,模具架(310)上的松紧杆(3102)为压紧模具状态,当输送至指定位置时,松紧装置(2)的气缸运行,带动第二伸缩杆下压模具架(310)上的连杆机构(3101)使松紧杆(3102)抬起,模具为自由状态,此时模具拉出机构(10)运行,由推动杆(103)推动夹具(101),夹具(101)夹住模具放置于托板(102)上,取模机构(11)上的3个取模治具(112)用定位销(1125)嵌入模具凹槽,用吸盘(1124)吸住模具,然后取掉模具放回第一输送带上的模具架(310),接着,松紧装置(2)的气缸带动第二伸缩杆上升,即断开与连杆机构(3101)的连接,从而使连杆机构(3101)上的松紧杆(3102)为继续压紧模具状态,然后输送回注浆生产线。取掉模具后的陶瓷胚体由第二输送带(32)送至削水口位置时,光电感应器(41)感应到陶瓷胚体到位,第二传送带(32)停止运行,柔性夹爪(43)旋转夹住陶瓷胚体,图像传感器(42)定位,6关节机械手(44)根据图像传感器(42)给出的位置对陶瓷胚体进行削水口,柔性夹爪(43)松开,复位,陶瓷胚体放行。
35.本实施例中利用6关节机械手(44)进行削水口,其重复精度高,有牵引示教功能,现场人工示范一次,机械手(44)就可以7x24小时不断重复执行,且根据需要机械手可设置不同关节形式。
36.削水口装置(4)的图像传感器(42)用于对陶瓷胚体位置补偿,确保机械手能够准确进行削水口操作。
37.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点,对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
38.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。