1.本实用新型涉及除锈机器人技术领域,具体为一种摇臂回收式爬壁除锈机器人。
背景技术:
2.钢铁是铁与碳、硅、锰、磷、硫以及少量的其他元素所组成的合金,其中除铁外,碳的含量对钢铁的机械性能起着主要作用,故统称为铁碳合金,它是工程技术中最重要、也是最主要的,用量最大的金属材料,钢铁在户外使用时,由于风雨的侵蚀,会在钢铁的表面产生大量的铁锈,因此需要对钢铁进行除锈处理,在现有的技术中,针对大型钢材一般采用化学除锈的方法进行除锈,机械除锈具有除锈速度快,效果好,除锈成本低,在除锈的同时,还能消除表面的杂物,对表面有一定的美化作用,可控制性高,特别针对大型钢板,钢筋,钢材,钢结构除锈,在进行除锈时,一般通过将施工人员吊起,然后将除锈剂喷洒在钢铁表面,比较浪费人力,也有通过除锈机器人进行除锈,现有的除锈机器人只能对前进路线上的铁锈进行处理,不能对其他方位的铁锈进行处理。
技术实现要素:
3.鉴于现有技术中所存在的问题,本实用新型公开了一种摇臂回收式爬壁除锈机器人,采用的技术方案是,包括安装箱,所述安装箱前端的左右侧壁均设有连接板,两块连接板的外侧壁均通过套筒连接有主动轮安装箱,主动轮安装箱内设有移动单元,所述安装箱后端的下表面设有从动轮单元,所述安装箱的上表面设有第一减速器和摇臂电机,摇臂电机的输出端固定连接第一减速器的输入端,第一减速器的输出端固定连接主轴的下端,主轴的上端设有安装架,安装架为“u”型架,安装架两侧板的上端之间设有连接块,连接块的两端均与安装架之间转动连接,连接块上开设有通槽,通槽内设有活动板,活动板的后端置于通槽内,活动板与连接块之间滑动连接,活动板上设有固定块,固定块的左右侧壁均设有气拉簧,气拉簧的一端与固定块之间转动连接,气拉簧的另一端与安装架之间转动连接,活动板的前端设有前支架,安装架的下端设有连接架,连接架的前端设有两块转动块,两块转动块之间设有连接杆,连接杆穿过前支架且与前支架之间转动连接,所述前支架的前侧壁设有除锈装置安装单元,所述安装箱内设有控制盒,控制盒的输入端电连接外部电源的输出端,控制盒的输出端电连接摇臂电机的输入端,通过摇臂电机输出动力至第一减速器,通过第一减速器带动主轴进行转动,通过主轴可以带动安装架进行转动,通过安装架可以带动活动板和连接架进行转动,通过活动板和连接架可以带动前支架进行转动,通过前支架可以带动除锈装置进行摆动,从而可以使除锈装置进行摆臂运动,通过气拉簧可以带动活动板向前运动,从而可以使前支架的上端向前运动,从而可以使除锈装置紧贴钢铁表面。
4.作为本实用新型的一种优选技术方案,所述移动单元包括主动轮、第二减速器、套筒、连接轴和移动电机,所述连接轴为两根,且分别置于两个主动轮安装箱内,连接轴的内端穿过主动轮安装箱置于相对应的套筒内,主动轮安装箱的下侧壁设有磁铁,移动电机置于主动轮安装箱内,移动电机的输出端固定连接第二减速器的输入端,第二减速器的两个
输出端分别连接两根转轴的内端,两根转轴的外端分别穿过主动轮安装箱的左右侧壁连接有主动轮,移动电机的输入端电连接控制盒的输出端,通过移动电机输出动力至第二减速器,通过第二减速器可以带动主动轮进行转动,通过主动轮的转动可以使除锈装置进行移动,通过套筒和连接轴可以使主动轮安装箱与安装箱之间连接,通过磁铁可以使机器人吸附在钢铁表面。
5.作为本实用新型的一种优选技术方案,所述除锈装置安装单元包括连接法兰、支管、连接盘、毛刷盘盖板和毛刷盘,所述支管置于前支架的前侧壁,支管通过连接法兰与前支架之间固定连接,支管的下端设有连接盘,连接盘的下端设有毛刷盘盖板,毛刷盘盖板内部中空,毛刷盘盖板内设有电动喷头,毛刷盘盖板的下端设有毛刷盘,电动喷头的输入端电连接控制盒的输出端,毛刷盘盖板和毛刷盘之间通过连接单元连接,毛刷盘盖板上设有回收单元,通过连接法兰可以使支管与前支架之间固定连接,通过电动喷头可以用来喷洒除锈剂,通过毛刷盘上的毛刷可以将铁锈从钢铁表面分离。
6.作为本实用新型的一种优选技术方案,所述连接单元包括弹簧芯、压板、弹簧和弹簧底座,所述压板为四块,且等角度置于毛刷盘盖板的上表面,弹簧底座为四个,且分别置于毛刷盘上表面与压板对应的位置,每块压板上均设有弹簧芯,弹簧芯穿过压板与弹簧底座之间螺纹连接,弹簧芯上套接有弹簧,可以用来保证毛刷盘会紧贴钢铁表面,保证除锈的效果。
7.作为本实用新型的一种优选技术方案,所述回收单元包括回收管和回收管连接法兰,回收管为两根,且均置于毛刷盘盖板的上表面,回收管连通毛刷盘盖板内部,回收管通过回收管连接法兰与毛刷盘盖板之间固定连接,可以对废水废锈统一回收。
8.作为本实用新型的一种优选技术方案,所述从动轮单元包括底板、转动板、从动轮支架和从动轮,所述底板置于安装箱后端的下表面,底板的下表面设有转动板,转动板与底板之间转动连接,转动板的下表面设有从动轮支架,从动轮支架上转动连接有从动轮,可以用来保证机器人运动的稳定性。
9.作为本实用新型的一种优选技术方案,所述套筒与连接轴之间通过固定销插接,可以将固定销拔出可以很方便的将主动轮安装箱与安装箱之间分开。
10.作为本实用新型的一种优选技术方案,还包括支撑架,所述支撑架为“u”形架,支撑架的两端分别与两个主动轮安装箱的外侧壁之间连接,可以用来保证机器人的稳定性。
11.作为本实用新型的一种优选技术方案,还包括调节板和摆杆接触开关,所述调节板置于第一减速器的上表面,调节板上设置有两条滑槽,调节板的上表面与滑槽对应的位置设有摆杆接触开关,摆杆接触开关上开设有螺栓孔,摆杆接触开关的输入端电连接控制盒的输入端,通过将摆杆接触开关沿滑槽进行移动可以调节摆杆接触开关的位置,通过调节摆杆接触开关的位置可以用来控制机器人摆臂的范围。
12.本实用新型的有益效果:本实用新型通过移动电机输出动力至第二减速器,通过第二减速器可以带动主动轮进行转动,通过主动轮的转动可以使除锈装置进行移动,通过套筒和连接轴可以使主动轮安装箱与安装箱之间连接,通过磁铁可以使机器人吸附在钢铁表面,通过摇臂电机输出动力至第一减速器,通过第一减速器带动主轴进行转动,通过主轴可以带动安装架进行转动,通过安装架可以带动活动板和连接架进行转动,通过活动板和连接架可以带动前支架进行转动,通过前支架可以带动除锈装置进行摆动,从而可以使除
锈装置进行摆臂运动,通过气拉簧可以带动活动板向前运动,从而可以使前支架的上端向前运动,从而可以使除锈装置紧贴钢铁表面,通过连接法兰可以使支管与前支架之间固定连接,通过电动喷头可以用来喷洒除锈剂,通过毛刷盘上的毛刷可以将铁锈从钢铁表面分离,通过回收管可以对废水废锈统一回收。
附图说明
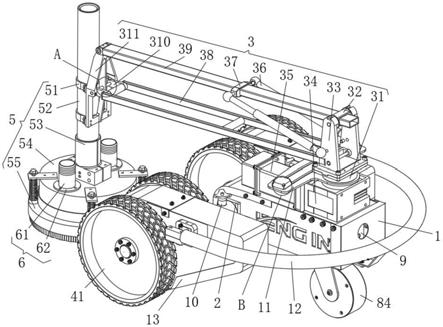
13.图1为本实用新型结构示意图;
14.图2为本实用新型底部结构示意图;
15.图3为本实用新型主动轮安装箱内部结构示意图;
16.图4为本实用新型a处局部放大结构示意图;
17.图5为本实用新型b处局部放大结构示意图。
18.图中:1安装箱、2连接板、3摇臂单元、31主轴、32连接块、33安装架、34第一减速器、35摇臂电机、36气拉簧、37固定块、38连接架、39活动板、310转动块、311前支架、4移动单元、41主动轮、42第二减速器、43套筒、44连接轴、45移动电机、5除锈装置安装单元、51连接法兰、52支管、53连接盘、54毛刷盘盖板、55毛刷盘、6回收单元、61回收管、62回收管连接法兰、7连接单元、71弹簧芯、72压板、73弹簧、74弹簧底座、8从动轮单元、81底板、82转动板、83从动轮支架、84从动轮、9控制盒、10固定销、11调节板、12支撑架、13主动轮安装箱、14电动喷头、15磁铁、16摆杆接触开关、17螺栓孔、18连接杆。
具体实施方式
19.实施例1
20.如图1至图5所示,本实用新型公开了一种摇臂回收式爬壁除锈机器人,采用的技术方案是,包括安装箱1,安装箱1前端的左右侧壁均设有连接板2,两块连接板2的外侧壁均通过套筒43连接有主动轮安装箱13,主动轮安装箱13内设有移动单元4,安装箱1后端的下表面设有从动轮单元8,安装箱1的上表面设有第一减速器34和摇臂电机35,摇臂电机35的输出端固定连接第一减速器34的输入端,第一减速器34的输出端固定连接主轴31的下端,主轴31的上端设有安装架33,安装架33为“u”型架,安装架33两侧板的上端之间设有连接块32,连接块32的两端均与安装架33之间转动连接,连接块32上开设有通槽,通槽内设有活动板39,活动板39的后端置于通槽内,活动板39与连接块32之间滑动连接,活动板39上设有固定块37,固定块37的左右侧壁均设有气拉簧36,气拉簧36的一端与固定块37之间转动连接,气拉簧36的另一端与安装架33之间转动连接,活动板39的前端设有前支架311,安装架33的下端设有连接架38,连接架38的前端设有两块转动块310,两块转动块310之间设有连接杆18,连接杆18穿过前支架311且与前支架311之间转动连接,前支架311的前侧壁设有除锈装置安装单元5,安装箱1内设有控制盒9,控制盒9的输入端电连接外部电源的输出端,控制盒9的输出端电连接摇臂电机35的输入端,通过摇臂电机35输出动力至第一减速器34,通过第一减速器34带动主轴31进行转动,通过主轴31可以带动安装架33进行转动,通过安装架33可以带动活动板39和连接架38进行转动,通过活动板39和连接架38可以带动前支架311进行转动,通过前支架311可以带动除锈装置进行摆动,从而可以使除锈装置进行摆臂运动,通过气拉簧36可以带动活动板39向前运动,从而可以使前支架311的上端向前运动,从而可
以使除锈装置紧贴钢铁表面。
21.作为本实用新型的一种优选技术方案,移动单元4包括主动轮41、第二减速器42、套筒43、连接轴44和移动电机45,连接轴44为两根,且分别置于两个主动轮安装箱13内,连接轴44的内端穿过主动轮安装箱13置于相对应的套筒43内,主动轮安装箱13的下侧壁设有磁铁15,移动电机45置于主动轮安装箱13内,移动电机45的输出端固定连接第二减速器42的输入端,第二减速器42的两个输出端分别连接两根转轴的内端,两根转轴的外端分别穿过主动轮安装箱13的左右侧壁连接有主动轮41,移动电机45的输入端电连接控制盒9的输出端,通过移动电机45输出动力至第二减速器42,通过第二减速器42可以带动主动轮41进行转动,通过主动轮41的转动可以使除锈装置进行移动,通过套筒43和连接轴44可以使主动轮安装箱13与安装箱1之间连接,通过磁铁15可以使机器人吸附在钢铁表面。
22.作为本实用新型的一种优选技术方案,除锈装置安装单元5包括连接法兰51、支管52、连接盘53、毛刷盘盖板54和毛刷盘55,支管52置于前支架311的前侧壁,支管52通过连接法兰51与前支架311之间固定连接,支管52的下端设有连接盘53,连接盘53的下端设有毛刷盘盖板54,毛刷盘盖板54内部中空,毛刷盘盖板54内设有电动喷头14,毛刷盘盖板54的下端设有毛刷盘55,电动喷头14的输入端电连接控制盒9的输出端,毛刷盘盖板54和毛刷盘55之间通过连接单元7连接,毛刷盘盖板54上设有回收单元6,通过连接法兰51可以使支管52与前支架311之间固定连接,通过电动喷头14可以用来喷洒除锈剂,通过毛刷盘55上的毛刷可以将铁锈从钢铁表面分离。
23.作为本实用新型的一种优选技术方案,连接单元7包括弹簧芯71、压板72、弹簧73和弹簧底座74,压板72为四块,且等角度置于毛刷盘盖板54的上表面,弹簧底座74为四个,且分别置于毛刷盘55上表面与压板72对应的位置,每块压板72上均设有弹簧芯71,弹簧芯71穿过压板72与弹簧底座74之间螺纹连接,弹簧芯71上套接有弹簧73,通过弹簧73的弹力可以用来保证毛刷盘55会紧贴钢铁表面,保证除锈的效果。
24.作为本实用新型的一种优选技术方案,回收单元6包括回收管61和回收管连接法兰62,回收管61为两根,且均置于毛刷盘盖板54的上表面,回收管61连通毛刷盘盖板54内部,回收管61通过回收管连接法兰62与毛刷盘盖板54之间固定连接,通过回收管61可以对废水废锈统一回收。
25.作为本实用新型的一种优选技术方案,从动轮单元8包括底板81、转动板82、从动轮支架83和从动轮84,底板81置于安装箱1后端的下表面,底板81的下表面设有转动板82,转动板82与底板81之间转动连接,转动板82的下表面设有从动轮支架83,从动轮支架83上转动连接有从动轮84,通过从动轮84可以用来保证机器人运动的稳定性。
26.作为本实用新型的一种优选技术方案,套筒43与连接轴44之间通过固定销10插接,通过将固定销10拔出可以很方便的将主动轮安装箱13与安装箱1之间分开。
27.作为本实用新型的一种优选技术方案,还包括支撑架12,支撑架12为“u”形架,支撑架12的两端分别与两个主动轮安装箱13的外侧壁之间连接,通过支撑架12可以用来保证机器人的稳定性。
28.作为本实用新型的一种优选技术方案,还包括调节板11和摆杆接触开关16,调节板11置于第一减速器34的上表面,调节板11上设置有两条滑槽,调节板11的上表面与滑槽对应的位置设有摆杆接触开关16,摆杆接触开关16上开设有螺栓孔17,摆杆接触开关16的
输入端电连接控制盒9的输入端,通过将摆杆接触开关16沿滑槽进行移动可以调节摆杆接触开关16的位置,通过调节摆杆接触开关16的位置可以用来控制机器人摆臂的范围。
29.本实用新型的工作原理:将机器人放置在钢铁表面,通过磁铁15可以使机器人吸附在钢铁表面,然后打开移动电机45,通过移动电机45输出动力至第二减速器42,通过第二减速器42可以带动主动轮41进行转动,通过主动轮41的转动可以使除锈装置进行移动,通过套筒43和连接轴44可以使主动轮安装箱13与安装箱1之间连接,当需要机器人摆臂时,打开摇臂电机35,通过摇臂电机35输出动力至第一减速器34,通过第一减速器34带动主轴31进行转动,通过主轴31可以带动安装架33进行转动,通过安装架33可以带动活动板39和连接架38进行转动,通过活动板39和连接架38可以带动前支架311进行转动,通过前支架311可以带动除锈装置进行摆动,从而可以使除锈装置进行摆臂运动,通过气拉簧36可以带动活动板39向前运动,从而可以使前支架311的上端向前运动,从而可以使除锈装置紧贴钢铁表面,通过连接法兰51可以使支管52与前支架311之间固定连接,通过电动喷头14可以用来喷洒除锈剂,通过毛刷盘55上的毛刷可以将铁锈从钢铁表面分离,通过弹簧73的弹力可以用来保证毛刷盘55会紧贴钢铁表面,保证除锈的效果,通过回收管61可以对废水废锈统一回收,通过从动轮84和支撑架12可以用来保证机器人运动的稳定性,通过将摆杆接触开关16沿滑槽进行移动可以调节摆杆接触开关16的位置,通过调节摆杆接触开关16的位置可以用来控制机器人摆臂的范围。
30.本实用新型涉及的电路连接为本领域技术人员采用的惯用手段,可通过有限次试验得到技术启示,属于广泛使用的现有技术,本实用新型中,摇臂电机35可采用型号为y160m1-2。
31.本文中未详细说明的部件为现有技术。
32.上述虽然对本实用新型的具体实施例作了详细说明,但是本实用新型并不限于上述实施例,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本实用新型宗旨的前提下做出各种变化,而不具备创造性劳动的修改或变形仍在本实用新型的保护范围以内。