1.本实用新型涉及金属焊接设备领域,尤其是一种龙门式罐体缝隙焊接机。
背景技术:
2.随着我国工业高速发展,在自动化生产线中常常会对圆形、椭园、异形筒体焊接,焊接过程中,工件不能进行位置移动,焊接效率低,焊接时间长,基于这种状况,我们需要设计一种能够改变焊接位置的自动焊接机,满足自动化焊接的需求。
技术实现要素:
3.针对现有技术中存在的不足,本实用新型提供一种龙门式罐体缝隙焊接机,实现全方位的焊接,提高焊接效率,具有防坠落功能,避免意外断电等突发情况出现时砸伤工件。本实用新型采用的技术方案是:
4.一种龙门式罐体缝隙焊接机,其特征在于:包括导轨、龙门架、升降架、防坠件和焊枪,所述龙门架滑动设于导轨并能够沿第一方向滑动,所述升降架设于龙门架内并能够沿第二方向滑动;
5.所述防坠件设置在升降架上,所述防坠件能够与龙门架卡接,以防止升降架下坠;
6.所述焊枪滑动设于在升降架并能够沿第三方向滑动;
7.所述第一方向、第二方向和第三方向互相垂直。
8.进一步地,所述龙门架底部设置第一驱动件,所述第一驱动件能够驱动龙门架在导轨上滑动。
9.进一步地,所述龙门架顶部设置有第二驱动件,所述第二驱动件能够驱动升降架在龙门架内做升降运动。
10.进一步地,所述防坠件包括防坠支架和卡件,所述防坠支架设置在升降架上,所述卡件旋转设于升降架,所述卡件能够与龙门架卡接,以防止升降架上升过程时下坠。
11.进一步地,所述卡件一端设卡接部,所述龙门架上设置齿条,当升降架上升时,卡接部沿齿条运动;当升降架停止上升时,卡接部与齿条卡接。
12.进一步地,所述卡件另一端设释放部,当拨动释放部时,卡接部处于与齿条分离状态。
13.进一步地,所述升降架上设置有第三驱动件,所述第三驱动件能够驱动释放部运动以实现卡接部与齿条的分离。
14.进一步地,所述龙门架上设置有爬梯,所述升降架上设置有吸尘器。
15.本实用新型的优点:
16.本技术利用龙门架和升降架实现焊枪位置的调节,方便对工件表面所需位置进行焊接,自动化程度高,焊接效率大大提高;
17.升降架上设置防坠件,保证升降架顺利上升,升降架停止运动时自动卡接,避免断电等意外情况下升降架下落砸伤工件,提高这个设备的使用安全性。
附图说明
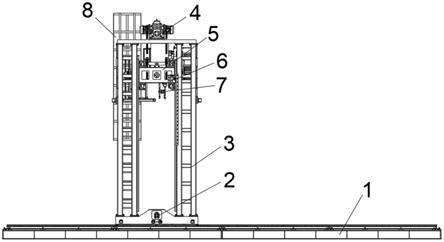
18.图1为本实用新型的主视图。
19.图2为本实用新型的左视图。
20.图3为本实用新型的俯视图。
21.图4为本实用新型龙门架、升降架和防坠件的装配示意图。
22.图中:1-导轨,2-第一驱动件,3-龙门架,4-第二驱动件,5-升降架,6-防坠件,7-焊枪,8-爬梯,9-吸尘器,301-齿条,501-导向轮,601-防坠支架,602-卡件,603-第三驱动件,6021-卡接部,6022-释放部。
具体实施方式
23.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
24.请参阅附图1-4,本技术提供一种龙门式罐体缝隙焊接机,包括导轨1、龙门架3、升降架5、防坠件6和焊枪7,所述龙门架3滑动设于导轨1并能够沿第一方向滑动,所述升降架5设于龙门架3内并能够沿第二方向滑动;
25.所述防坠件6设置在升降架5上,所述防坠件6能够与龙门架3卡接,以防止升降架5上升过程时下坠;
26.所述焊枪7滑动设于在升降架5并能够沿第三方向滑动;
27.所述第一方向、第二方向和第三方向互相垂直。
28.为了方便高位部件的检修,所述龙门架3上设置有爬梯8;为了方便回收烟尘和提高设备清洁度,符合环保要求,所述升降架5上设置有吸尘器。
29.本技术能够实现焊枪在第一方向(x轴)、第二方向(z轴)和第三方向(y轴)上位置自动调节,自动化程度高,有效提高焊接效率,实现环缝、纵缝、椭圆焊缝的焊接,配合防坠件6实现升降架5的防坠落功能,有效提高焊接安全性。
30.在本技术中,所述龙门架3底部设置第一驱动件2,所述第一驱动件2能够驱动龙门架3在导轨5上滑动;具体地,第一驱动件2为电机,所述电机的输出端穿过龙门架5连接齿轮,所述导轨1上设置与电机输出端齿轮相啮合的齿条,当电机通电时,齿条转动并沿齿条移动,实现龙门架3在第一方向上的运动。
31.在本技术中,所述龙门架3顶部设置有第二驱动件4,所述第二驱动件4能够驱动升降架5在龙门架3内做升降运动;具体地,第二驱动件4为电机,其输出端与升降架5之间为链传动。
32.在本技术中,焊枪7与升降架5之间通过直线滑轨相连接,通过直线滑轨驱动焊枪7滑动来调节焊枪7在第三方向上的位置。
33.在本技术中,为了实现防坠落功能,所述防坠件6包括防坠支架601和卡件602,所述防坠支架601设置在升降架5上,所述卡件602旋转设于升降架5,所述卡件602能够与龙门架3卡接,以防止升降架5下坠;
34.作为本技术的一个实施例,升降架5两端设置能够沿龙门架3滚动的导向轮501,以提高升降架5运动过程中的稳定性。
35.所述卡件602一端设卡接部6021,所述龙门架3上设置齿条301,当升降架5上升时,卡接部6021沿齿条301运动;当升降架5停止上升时,卡接部6021与齿条301卡接;
36.所述卡件602另一端设释放部6022,当拨动释放部6022时,卡接部6021处于与齿条301分离状态;
37.所述升降架5上设置有第三驱动件603,所述第三驱动件603能够驱动释放部6022运动以实现卡接部6021与齿条301的分离;
38.具体地,自然状态下,卡件602上的卡接部6021与齿条301接触,在升降架5上升过程中,卡件602反复绕其旋转点旋转,卡接部6021反复接触齿条301,直至上升到位,卡接部6021重新卡接齿条301,当断电或链条意外断裂时,在卡件602与齿条301卡接的状态下,升降架5不会出现坠落情况,由此提高使用安全性,防止砸伤工件或操作人员;
39.当需要下降升降架5时,第三驱动件603动作拨动释放部6022,使卡件602绕其旋转点旋转,卡接部6021与齿条301分离,防坠件6呈释放状态,升降架5便可顺利下降。
40.作为本技术的一个实施例,第三驱动件603为气缸、电动缸、油缸等直线驱动器。
41.在本技术中,升降架5上设置电控柜,电控柜用于智能化控制各个电气元件,实现整个设备的智能化运转。
42.综上,本技术利用龙门架和升降架实现焊枪位置的调节,方便对工件表面所需位置进行焊接,自动化程度高,焊接效率大大提高;升降架上设置防坠件,保证升降架顺利上升,升降架停止运动时自动卡接,避免断电等意外情况下升降架下落砸伤工件,提高这个设备的使用安全性。
43.最后所应说明的是,以上具体实施方式仅用以说明本实用新型的技术方案而非限制,尽管参照实例对本实用新型进行了详细说明,本领域的普通技术人员应当理解,可以对本实用新型的技术方案进行修改或者等同替换,而不脱离本实用新型技术方案的精神和范围,其均应涵盖在本实用新型的权利要求范围当中。