1.本实用新型涉及一种机械手,特别涉及一种带轮装框机械手。
背景技术:
2.在现代汽车工业领域中,旋压皮带轮被广泛应用作汽车发动机的曲轴皮带轮、水泵皮带轮、风扇皮带轮、转向泵皮带轮、发电机皮带轮等。在皮带轮的旋压加工过程中,在油压机上将板料拉伸得到筒状皮带轮坯件后,需要将该筒状皮带轮坯件装框,运送到下一道加工工序。现有技术通常是采用人工或机械手将输送台上的筒状皮带轮坯件一个一个放入框中,不仅效率低下,而且堆料不整齐。
技术实现要素:
3.本实用新型要解决的技术问题是:提供一种带轮装框机械手,以解决现有技术存在的装框效率低、堆料不整齐的问题。
4.解决上述技术问题的技术方案是:一种带轮装框机械手,包括安装板、多个机械爪、感应器;所述的安装板与机器人的机械臂下端固定连接;多个机械爪等间距并排安装在安装板的底部,感应器安装在安装板的底部,该感应器与控制器的信号输入端连接,控制器的信号输出端与机械爪连接。
5.本实用新型的进一步技术方案是:每个机械爪均包括固定安装在安装板底部的电吸盘、多个导向销;多个导向销以该机械爪的电吸盘为中心呈圆形或方形排列。
6.本实用新型的进一步技术方案是:两个相邻机械爪的电吸盘之间的间距比筒状皮带轮坯件的最大外径大5~20mm。
7.本实用新型的进一步技术方案是:所述的机械爪有五个,每个机械爪有四个导向销。
8.本实用新型的进一步技术方案是:该机械手还包括有限位装置,所述的限位装置包括限位端板和两块限位侧板,所述的限位端板用于对输送台输送终点进行限位,该限位端板安装在输送台的输出端;所述的两块限位侧板用于限位输送台上的筒状皮带轮坯件按直线路径输送,该两块限位侧板分别安装在输送台的两侧。
9.本实用新型的进一步技术方案是:在限位端板上还安装有用于对筒状皮带轮坯件的到位进行检测的到位感应器,该到位感应器的输出端与控制器的信号输入端连接。
10.由于采用上述结构,本实用新型之一种带轮装框机械手与现有技术相比,具有以下有益效果:
11.1.可实现自动化装框
12.由于本实用新型包括安装板、多个机械爪、感应器;其中安装板与机器人的机械臂下端固定连接;多个机械爪等间距并排安装在安装板的底部,感应器安装在安装板的底部,该感应器与控制器的信号输入端连接,控制器的信号输出端与机械爪连接。工作时,筒状皮带轮坯件从油压机的出料端进入到输送台,机器人的机械臂带动本带轮装框机械手下行至
靠近筒状皮带轮坯件处,感应器感应到筒状皮带轮坯件,发出信号至控制器,控制器驱动多个机械爪同时对多个筒状皮带轮坯件进行抓取并装入框中,从而实现自动化装框。
13.2.效率高
14.由于本实用新型可以实现一次对多个筒状皮带轮坯件进行自动抓取装框,与现有的人工或机械手一个一个地抓取相比较,其效率大大提高。
15.3.堆料整齐
16.由于本实用新型可以实现一次对多个筒状皮带轮坯件进行自动抓取,并可将抓取的多个筒状皮带轮坯件整齐装入框中,堆料整齐,有效提高了框内的空间利用率。
17.4.抓料准确
18.由于本实用新型的每个机械爪均包括固定安装在安装板底部的电吸盘、多个导向销;多个导向销以该机械爪的电吸盘为中心呈圆形或方形排列,可将筒状皮带轮坯件准确地定位在对应电吸盘的下方。
19.进一步地,两个相邻机械爪的电吸盘之间的间距比筒状皮带轮坯件的最大外径大5~20mm,也可使每个电吸盘准确地吸附住筒状皮带轮坯件。
20.再进一步地,本实用新型还包括有限位装置,该限位装置包括限位端板和两块限位侧板,其中限位端板用于对输送台输送终点进行限位,该限位端板安装在输送台的输出端;两块限位侧板用于限位输送台上的筒状皮带轮坯件按直线路径输送,该两块限位侧板分别安装在输送台的两侧。通过该限位装置,可使进入输送台的筒状皮带轮坯件准确地输送至各机械手的下方,从而确保抓料准确。
21.更进一步地,本实用新型在限位装置的限位端板上还安装有用于对筒状皮带轮坯件的到位进行检测的到位感应器,该到位感应器的输出端与控制器的信号输入端连接。通过该到位感应器,可准确判断筒状皮带轮坯件是位输送到位,从而更进一步确保抓料准确。
22.5.结构合理
23.本实用新型在限位装置的限位端板上还安装有用于对筒状皮带轮坯件的到位进行检测的到位感应器。通过该到位感应器,可准确判断筒状皮带轮坯件输送到位,使控制器及时停止输送台的输送动作,避免了因输送过头使筒状皮带轮坯件撞击到限位端板上而受到损伤,其结构比较合理,易于推广应用。
24.下面,结合附图和实施例对本实用新型之一种带轮装框机械手的技术特征作进一步的说明。
附图说明
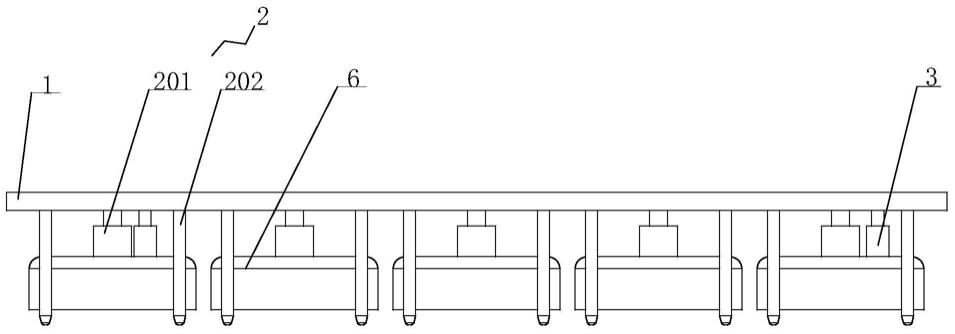
25.图1:本实用新型之一种带轮装框机械手的结构示意图,
26.图2:实施例一所述机械爪的结构示意图(仰视方向),
27.图3:实施例一中,利用限位装置对输送台上的筒状皮带轮坯件进行限位的结构示意图(俯视方向)。
28.在上述附图中,各附图标记说明如下:
29.1-安装板,
30.2-机械爪,201-电吸盘,202-导向销,
31.3-感应器,
32.4-限位装置,401-限位端板,402-限位侧板,
33.5-到位感应器,6-筒状皮带轮坯件,7-输送台。
具体实施方式
34.实施例一:
35.一种带轮装框机械手,如图1 所示,包括安装板1、五个机械爪2、感应器3。其中:
36.所述的安装板1与机器人的机械臂下端固定连接;五个机械爪2等间距并排安装在安装板1的底部,每个机械爪2均包括固定安装在安装板1底部的电吸盘201、四个导向销202。四个导向销202以该机械爪2的电吸盘201为中心呈方形排列。两个相邻机械爪2的电吸盘201之间的间距比筒状皮带轮坯件6的最大外径大10mm。
37.所述的感应器3有两个,分别安装在安装板1底部的第一、第五个电吸盘201的一侧,该感应器3与控制器的信号输入端连接,控制器的信号输出端与机械爪2的电吸盘201连接。
38.如图3所示,该机械手还包括有限位装置4,所述的限位装置4包括限位端板401和两块限位侧板402,所述的限位端板401用于对输送台输送终点进行限位,该限位端板401安装在输送台7的输出端。所述的两块限位侧板402用于限位输送台7上的筒状皮带轮坯件6按直线路径输送,该两块限位侧板402分别安装在输送台7的两侧。
39.在限位端板401上还安装有用于对筒状皮带轮坯件6的到位进行检测的到位感应器5,该到位感应器5的输出端与控制器的信号输入端连接,该到位感应器5可准确判断筒状皮带轮坯件输送到位,使控制器及时停止输送台7的输送动作。
40.作为本实施例的另一种变换,所述机械爪2还可有2,...,10等任意个机械爪2。
41.作为本实施例的另一种变换,每个机械爪2还可有3,...,8等任意个导向销202。
42.作为本实施例的另一种变换,两个相邻机械爪2的电吸盘201之间的间距比筒状皮带轮坯件6的最大外径还可大5,...,10,...,20mm等。
43.作为本实施例的又一种变换,所述的导向销202还可以呈圆形排列。
44.本实用新型的工作过程:
45.筒状皮带轮坯件6从油压机的出料端进入到输送台7,机器人的机械臂带动本带轮装框机械手下行至靠近筒状皮带轮坯件处,感应器3感应到筒状皮带轮坯件6,发出信号至控制器,控制器驱动五个机械爪2同时对五个筒状皮带轮坯件6进行抓取并装入整齐码入框中。