1.本发明涉及智能机械设备控制技术领域,具体为一种针对槽罐清洗和检测的十个自由度收放伸缩机器人。
背景技术:
2.随着社会技术的不断进步,高铁、地铁、公路隧道等行业对安全预警的要求日益增加,目前普遍采取人工作业等传统方式,由于空间受限,人员身体限制等因素,在作业时一些安全隐患时有发生;铁路运输乙二醇的槽罐车的清洗待前期处理完毕后,还需要至少两名工人携带呼吸面具进入槽车进行残液绣渣的抽吸和清洗效果检测等工作,需要在密闭空间内操作很长时间,在槽罐有限且狭小的空间内,人员操作会有接触不到的地方,导致清洗检测效果不好;另外工人进入槽罐内也会受温度环境等因素的影响,存在较大安全隐患。
技术实现要素:
3.本发明的目的在于提供一种针对槽罐清洗和检测的十个自由度收放伸缩机器人,以解决上述背景技术中提出的问题。
4.为实现上述目的,本发明提供如下技术方案:一种针对槽罐清洗和检测的十个自由度收放伸缩机器人,包括罐外四自由度数控机械臂,所述罐外四自由度数控机械臂的一侧外壁上安装有连接板,连接板的底端外壁上固定连接有中心板,中心板的一侧外壁上固定连接有回转驱动器,回转驱动器的输出端固定连接有第一连接件,第一连接件的一侧外壁上固定连接有罐内四自由度收放伸缩机械臂,罐内四自由度收放伸缩机械臂输出端的一侧外壁上固定连接有电机,电机输出端的一侧外壁上固定连接有第二连接件,第二连接件的一侧外壁上固定连接有擦拭杆。
5.优选的,所述罐外四自由度数控机械臂的一侧外壁上固定连接有旋转头,且连接板固定连接于旋转头的一侧内壁上。
6.优选的,所述擦拭杆的一端固定连接有多点擦拭头,擦拭杆的一侧外壁上固定连接有罐底吸污头。
7.优选的,所述中心板的中部安装有摄像头,中心板的一侧外壁上固定连接有的第一加强筋板。
8.优选的,所述第一连接件的一侧外壁上分布安装有螺丝,且罐内四自由度收放伸缩机械臂通过螺丝固定连接于第一连接件的一侧外壁上。
9.优选的,所述摄像头的两侧对称设置有第二加强筋板,且第二加强筋板固定连接于中心板的一侧外壁上。
10.优选的,所述第一连接件的一侧外壁上分布固定有第三加强筋板。
11.与现有技术相比,本发明的有益效果是:本发明所设计的机器人可以代替人工作业,完成全部槽罐车清洗后的残液抽吸和擦拭检测工作,极大的降低了劳动强度、消除了洗车的安全隐患、减轻了环境污染、提高了检测效率;本发明采用多级伸缩式机构设计,使机
器人结构紧凑,可实现在狭小空间内安全作业。
附图说明
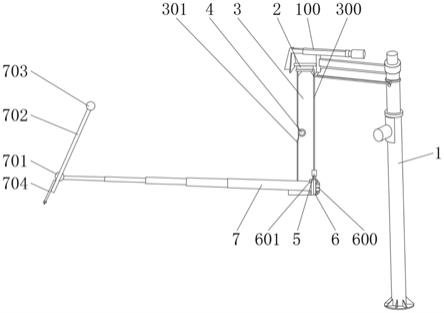
12.图1为本发明的整体立体结构示意图;
13.图2为本发明的罐内四自由度收放伸缩机械臂收缩状态下主视结构示意图;
14.图3为本发明的罐内四自由度收放伸缩机械臂收缩状态下侧视结构示意图;
15.图4为本发明的罐内四自由度收放伸缩机械臂收缩状态下立体结构示意图;
16.图5为本发明的中心板立体结构示意图;
17.图中:1、罐外四自由度数控机械臂;100、旋转头;2、连接板;3、中心板;300、第一加强筋板;301、第二加强筋板;4、摄像头;5、回转驱动器;6、第一连接件;600、第三加强筋板;601、螺丝;7、罐内四自由度收放伸缩机械臂;700、电机;701、第二连接件;702、擦拭杆;703、多点擦拭头;704、罐底吸污头。
具体实施方式
18.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
19.请参阅图1-5,本发明提供的一种实施例:一种针对槽罐清洗和检测的十个自由度收放伸缩机器人,包括罐外四自由度数控机械臂1,所述罐外四自由度数控机械臂1的一侧外壁上安装有连接板2,连接板2的底端外壁上固定连接有中心板3,中心板3的一侧外壁上固定连接有回转驱动器5,回转驱动器5的输出端固定连接有第一连接件6,第一连接件6的一侧外壁上固定连接有罐内四自由度收放伸缩机械臂7,罐内四自由度收放伸缩机械臂7输出端的一侧外壁上固定连接有电机700,电机700输出端的一侧外壁上固定连接有第二连接件701,第二连接件701的一侧外壁上固定连接有擦拭杆702;所述罐外四自由度数控机械臂1的一侧外壁上固定连接有旋转头100,且连接板2固定连接于旋转头100的一侧内壁上,旋转头100用于固定连接板2;所述擦拭杆702的一端固定连接有多点擦拭头703,擦拭杆702的一侧外壁上固定连接有罐底吸污头704,多点擦拭头703用于擦拭罐壁,罐底吸污头704用于吸取铁屑及污水;所述中心板3的中部安装有摄像头4,中心板3的一侧外壁上固定连接有的第一加强筋板300,摄像头4用于拍照记录罐内擦拭状况,第一加强筋板300用于提高中心板3的强度;所述第一连接件6的一侧外壁上分布安装有螺丝601,且罐内四自由度收放伸缩机械臂7通过螺丝601固定连接于第一连接件6的一侧外壁上,螺丝601用于将罐内四自由度收放伸缩机械臂7固定在第一连接件6上;所述摄像头4的两侧对称设置有第二加强筋板301,且第二加强筋板301固定连接于中心板3的一侧外壁上,第二加强筋板301用于提高中心板3的强度;所述第一连接件6的一侧外壁上分布固定有第三加强筋板600,第三加强筋板600用于提高第一连接件6强度。
20.工作原理:使用本发明代替人工作业对槽罐车清洗后的残液进行抽吸及擦拭检测工作时,待清洗槽罐车到位后,罐外四自由度数控机械臂1定位到罐人孔位置,启动罐内四自由度收放伸缩机械臂7,带动擦拭杆702从人孔处垂直下入到槽罐中心位置,启动电机
700,擦拭杆702左右各翻转90
°
,罐内四自由度收放伸缩机械臂7可从原长1.6米伸长到4.0米,擦拭杆702上的半球型多点擦拭头703可180
°
旋转,能够接触到左右最远距离6米的待检位,多点擦拭头703左右各检测6个极限点,多点擦拭头703每旋转擦拭一个位置后可实时供摄像头4拍照检测;擦拭杆702另一端的罐底吸污头704可接触到最远4.5米的罐底位置,从而吸取铁屑及污水;多点擦拭头703通过回转驱动器5依次旋转定位拍照,擦拭杆702通过遥控器远程控制摄像头4近距离观察,罐内四自由度收放伸缩机械臂7、罐外四自由度数控机械臂1、摄像头4和电机700都采用防爆设计,旋转头100用于固定连接板2,连接板2用于固定中心板3,中心板3用于安装摄像头4和回转驱动器5,第一加强筋板300和第二加强筋板301用于提高中心板3的强度,第三加强筋板600用于提高第一连接件6的强度,螺丝601用于将罐内四自由度收放伸缩机械臂7固定在第一连接件6上,第二连接件701用于将擦拭杆702安装在电机700的输出端;本发明结构紧凑,作业范围广,通过罐外四自由度数控机械臂1与罐内四自由度收放伸缩机械臂7的设置,可使机械臂前后左右运动,做到槽罐底部残液的抽吸和罐体内任意角度和位置的擦拭检测,同时中心板3上固定的摄像头4可实时旋转,拍照记录罐内擦拭状况;本发明通过位移传感器和陀螺仪传感器实现数据的自动化采集,通过机器人控制器和远程人机交互协控器实现智能化远程控制,通过利用机器人空间定位控制算法、传感器融合算法以及远程人机交互界面和功能软件等实现对槽罐清洗和检测。
21.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。