1.本实用新型涉及测量领域,特别是一种基坑深层水平位移监测用机器人系统。
背景技术:
2.在现代基坑工程中,基坑开挖朝着大而深的趋势发展,而基坑深层水平位移是衡量基坑工程安全的重要因素,因此,对深基坑水平位移监测提出了更高要求。
3.目前国内大多采用传统的人工测量方法,测斜原理是通过倾角传感器测量安装在围护结构或者土体中的测斜管的倾角变化,获得倾角后可以由杆长经过三角函数转换得到横向间距进而经由累加得到位移。
4.现有的自动化测斜仪是将测斜管分为若干测量段,在每个测量段上安装倾角传感器,同时测量各段倾角,换算成位移后叠加得到挠度。此仪器成本较高,无法得到普遍使用。
5.目前市场上的大部分测斜仪主要采用电缆一端和传感器探头相连,另外一端是通过绕线盘和测量仪表相连的结构。电缆主要起到通信、连接的作用。同时,通过电缆上的数字标签,可以确定探头的具体位置。现场测量需要两个人配合操作完成,其中,一个人负责操作仪表进行数据采集,一个人负责向上拉升传感器探头,两个人互相配合,连续逐段测出产生位移后的测斜管轴线与铅垂线的夹角,再分段求出水平位移,最后累加得出总的位移量及沿管轴线整个孔位的变化情况。存在以下缺点:
6.1.测量过程需要两个人配合操作,无自动测量功能,测量效率低、费时、费力;
7.2.电缆直径较粗,普遍在10~12mm;内部含多股钢丝绳,电缆笨重,不方便携带;
8.3.通过目测的方式确定探头的位置,定位误差大,影响测量的准确性。
9.现有的自动化测斜仪是将测斜管分为若干测量段,在每个测量段上安装倾角传感器,同时测量各段倾角,换算成位移后叠加得到挠度。自动化测斜仪能够较好的解决人工测量存在的问题,但是仪器成本较高,现场仪器用量大,无法得到普遍使用,且仪器安装工作量较大。
技术实现要素:
10.本实用新型的主要目的在于克服现有技术中的上述缺陷,提出一种基坑深层水平位移监测用机器人系统,实现了测量过程自动化,并且提高了测量精度;将数据采集模块集于一个可自动升降的小型测量装置,实现了无缆线测量,具有便携性;且所有数据采集由测量装置自动完成,减少了人工测量的误差,提高了效率和准确性。同时,依靠单个测量装置即可实现所有测点的数据采集,极大降低了成本。
11.本实用新型采用如下技术方案:
12.一种基坑深层水平位移监测用机器人系统,包括:带齿导轨及电机驱动的机器人,所述带齿导轨安装在测斜管内导槽内;所述机器人设有电机、齿轮组合、动态倾角传感器、齿数计数器、数据采集及储存模块、数据传输模块;所述齿轮组合,与带齿导轨相配套,通过电机带动齿轮组合运转,供机器人在测斜管内升降移动,且齿轮组合与机器人通过活动弹
簧相连,以适应测斜管曲率;所述动态倾角传感器记录机器人在不同位置处的角度值;所述齿数计数器定位和记录机器人上下爬行距离;角度值和齿数计数保持时间同步,并将数据存储在存储模块中;待机器人爬出测斜管时,数据传输模块自动将角度值、齿数计数及对应时间传输至手持移动设备终端,并可在移动端设备查看监测数据。
13.具体地,所述带齿导轨共设有四条,两两对称分布于测斜管内,同时齿轮组合设有4个,与带齿导轨一一对应。
14.具体地,所述带齿导轨底部设置有限位装置,机器人下降至所述测斜管底部时,齿轮组合感应到限位装置时,电机反转,机器人转为向上爬行模式。
15.具体地,所述机器人还带有供电模块,供电模块为电机、动态倾角传感器、齿数计数器、数据采集及储存模块、数据传输模块等进行供电。
16.具体地,所述机器人还设置有防水外壳。
17.具体地,所述的动态倾角传感器可记录两个方向的角度值。
18.具体地,所述的数据传输模块为蓝牙模块,可与手持移动设备终端自动连接,传递相关数据。
19.具体地,所述的手持移动设备终端上安装有数据分析app应用软件,用以查看和分析所采集到的数据。
20.由上述对本实用新型的描述可知,与现有技术相比,本实用新型具有如下有益效果:
21.(1)本实用新型提出的机器人系统,实现了测量过程自动化;将数据采集模块集于一个可自动升降的小型测量装置,实现了无缆线测量,具有便携性;且所有数据采集由测量装置自动完成,减少了人工测量的误差,提高了效率和准确性;解决了目前人工测斜方法效率低下且需要耗费一定人力资源的问题,并大大降低了现有自动化测斜方法所需的成本。
22.(2)本实用新型的带齿导轨底部还设置有限位装置,机器人下降至所述测斜管底部时,齿轮组合感应到限位装置时,电机反转,机器人转为向上爬行模式;安全且智能化。
23.(3)所述齿轮组合与机器人间通过活动弹簧相连,在机器人沿导轨运动时给齿轮提供推力,保证齿轮与导轨的契合度,以适应测斜管曲率,并起到防滑作用。
附图说明
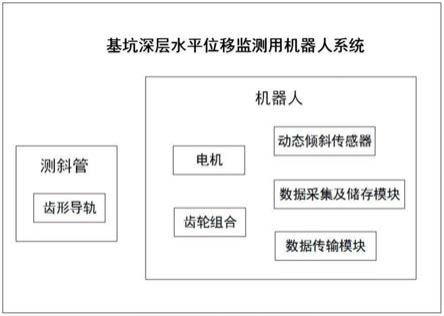
24.图1为本实用新型实施例的深基坑水平位移自动化监测系统的结构框图;
25.图2为本实用新型实施例的测斜管的俯视图;
26.图3为本实用新型实施例的测斜管的剖视图。
27.以下结合附图和具体实施例对本实用新型作进一步详述。
具体实施方式
28.本实用新型采用如下技术方案:
29.如图1,本实用新型实施例的深基坑水平位移自动化监测系统的结构框图,包括:带齿导轨及电机驱动的机器人,所述带齿导轨安装在测斜管内导槽内;所述机器人设有电机、齿轮组合、动态倾角传感器、齿数计数器、数据采集及储存模块、数据传输模块;所述齿轮组合,与带齿导轨相配套,通过电机带动齿轮组合运转,供机器人在测斜管内升降移动,
且齿轮组合与机器人通过活动弹簧相连,以适应测斜管曲率;所述动态倾角传感器记录机器人在不同位置处的角度值;所述齿数计数器定位和记录机器人上下爬行距离;角度值和齿数计数保持时间同步,并将数据存储在存储模块中;待机器人爬出测斜管时,数据传输模块自动将角度值、齿数计数及对应时间传输至手持移动设备终端,并可在移动端设备查看监测数据。
30.埋设的测斜管内导槽内含有特制带齿导轨,供机器人移动,具有提供竖向位移数据以及防滑功能;另外,所述齿轮组合与机器人间通过活动弹簧相连,在机器人沿导轨运动时给齿轮提供推力,保证齿轮与导轨的契合度,以适应测斜管曲率,并起到防滑作用。
31.所述带齿导轨底部还设置有限位装置,机器人下降至所述测斜管底部时,齿轮组合感应到限位装置时,电机反转,机器人转为向上爬行模式,保证机器人的安全使用,防止受到过大的冲击力,智能化高。
32.所述机器人还带有供电模块,供电模块为电机、动态倾角传感器、齿数计数器、数据采集及储存模块、数据传输模块等进行供电。
33.所述机器人还设置有防水外壳,保证机器人中设置的部件受潮,提高机器人的寿命。
34.所述的动态倾角传感器可记录两个方向的角度值。
35.所述的数据传输模块为蓝牙模块,可与手持移动设备终端自动连接,传递相关数据;且手持移动设备终端上安装有数据分析app应用软件,用以查看和分析所采集到的数据。
36.如图2是本实用新型实施例的测斜管的俯视图,本实施例中所述测斜管中的带齿导轨设有四条,两两对称分布于测斜管内,相邻两条导轨与测斜管中心所成角度为90度,同时齿轮组合设有4个,与带齿导轨一一对应。
37.如图3是本实用新型实施例的测斜管的剖视图,图中示出了测斜管以及测斜管中的齿形导轨110,齿形导轨的齿为三角形,当然也可以是梯形,机器人20以及装有与齿形导轨相配套的齿轮组合220,本实用新型实施例的齿轮组合是中间为一个球,外周有与齿形导轨的齿相配和的齿,形状同样为三角形,外周齿的个数由齿形导轨的齿的大小以及齿轮组合中间球的大小决定,当齿形导轨的齿是梯形,齿轮组合外周的齿也为梯形,所述供机器人在测斜管内升降移动,齿形导轨,供机器人移动,具有提供竖向位移数据以及防滑功能;所述齿轮组合与机器人间通过活动弹簧210相连,在机器人沿导轨运动时给齿轮提供推力,保证齿轮与导轨的契合度,以适应测斜管曲率,并起到防滑作用。
38.本实用新型提出的自动化监测系统,实现了测量过程自动化;将数据采集模块集于一个可自动升降的小型测量装置,实现了无缆线测量,具有便携性;且所有数据采集由测量装置自动完成,减少了人工测量的误差,提高了效率和准确性;解决了目前人工测斜方法效率低下且需要耗费一定人力资源的问题,并大大降低了现有自动化测斜方法所需的成本。
39.具体的工作过程如下:
40.将机器人放置在测斜管的管口,所述机器人的齿轮组合安装在测斜管的齿形导轨上;
41.开启电源,电池给电机供电,电机带动齿轮运转,机器人沿着测斜管的齿形导轨下
降;
42.当下降至测斜管底部时,齿轮组合感应到限位装置,电机反转,机器人转为向上爬行模式;
43.开始上升并同时开启数据采集,动态倾角传感器和齿数计数器采集实时倾角和齿数数据;
44.所述数据采集模块与手持移动设备终端自动连接,实现数据自动采集,将数据传输手持移动设备终端,所述数据采集模块为蓝牙模块。
45.为了提高测量精度,机器人上升至管口时取出,再次下放,取两次测量平均值。
46.上述仅为本实用新型的具体实施方式,但本实用新型的设计构思并不局限于此,凡利用此构思对本实用新型进行非实质性的改动,均应属于侵犯本实用新型保护范围的行为。