1.本发明涉及机器人语音控制技术领域,具体涉及一种机器人及其控制方法。
背景技术:
2.近年随着居民生活水平的提高,对智能家居的需求愈发强烈,家用机器人作为智能家居的一员受到越来越多消费者的青睐。
3.目前机器人主要通过自带的逻辑规划或手机app来控制机器人的相应行为,相对于传统的手动清扫或无逻辑规划的扫地模式,其更加智能,但是需要手机或按钮遥控器等辅助控制,操作比较繁琐。
4.为了解决家用机器人控制需要其他媒介(手机等)参与的问题,现在有些机器人搭载了语音控制功能,其可以通过语音控制机器人的行为,从而能将顾客的指令更快更方便的传送给机器人,互动性强,提升客户的参与感,使家用机器人在现有基础上更加智能化。
5.一般地,搭载了语音控制功能的机器人使用麦克风等声音信号采集装置来采集用户发出的语音控制指令,再传输给控制单元控制执行机构执行扫地、播放音乐、充电等指令。然而,机器人工作过程自身会产生一些噪音,比如马达或风机等的震动噪音,这些噪音会干涉麦克风采集信号,造成机器人对用户的语音控制指令理解不准确,用户使用体验差的问题。
技术实现要素:
6.为了解决现有机器人存在的上述技术问题,一方面,本发明提供了一种机器人。
7.本发明的机器人包括:机器人外壳;驱动元件,所述驱动元件设置在所述机器人外壳内,用于驱动所述机器人外壳移动;凸起结构,所述凸起结构凸起设置在所述机器人外壳的上表面;声音信号采集装置,所述声音信号采集装置设置在所述凸起结构上。
8.可选地,所述机器人至少包括三个所述声音信号采集装置,所述声音信号采集装置环形均匀分布。
9.可选地,所述声音信号采集装置环形均匀分布的直径范围为60mm
‑
100mm。
10.可选地,所述机器人至少包括三个所述声音信号采集装置,三个所述声音信号采集装置呈三角形分布,并且三个所述声音信号采集装置中一个相对于另外两个位于所述机器人外壳的前部。
11.可选地,所述声音信号采集装置包括pcb板、减震罩壳和麦克风芯片,所述减震罩壳设置在pcb板上并与所述pcb板围成了具有容纳腔的麦克风外部封装,所述麦克风芯片设置在容纳腔中;在所述减震罩壳顶部的中心区域设置有连通外部与所述容纳腔的拾音孔。
12.可选地,所述拾音孔的孔径孔深比大于1。
13.可选地,所述拾音孔的孔径孔深比大于2:1。
14.可选地,所述麦克风还包括防水防尘膜,所述防水防尘膜设置在所述减震罩壳上并且遮盖所述拾音孔。
15.可选地,所述凸起结构包括距离传感器,所述声音信号采集装置设置在所述距离传感器上。
16.可选地,所述机器人还包括设置在所述机器人外壳上的声音信号播放装置,所述声音信号播放装置的播音孔和所述声音信号采集装置的拾音孔两者朝向不同的方向。
17.可选地,所述声音信号播放装置的播音孔朝向垂直于所述机器人外壳的外立面。
18.可选地,所述声音信号采集装置的拾音孔朝向垂直于所述机器人外壳的上表面。
19.可选地,所述声音信号采集装置和所述声音信号播放装置中一者位于所述机器人外壳的前部,另一者则位于所述机器人外壳的后部。
20.可选地,所述机器人还包括设置在所述机器人外壳内的声音信号回采装置,所述声音信号回采装置用于回采所述声音信号播放装置播放的声音信号。
21.可选地,所述机器人还包括设置在所述机器人外壳内的降噪处理装置,所述降噪处理装置用于对所述声音信号采集装置采集的声音信号降噪处理。
22.可选地,所述机器人包括扫地机器人。
23.本发明的机器人包括机器人外壳、驱动元件、凸起结构和声音信号采集装置;其中,驱动元件设置在机器人外壳内,其用于驱动机器人外壳移动;凸起结构设置在机器人外壳的上表面,声音信号采集装置设置在该凸起结构上。
24.通常情况下,机器人的自身的噪音由驱动元件、边刷、滚刷和/或风机等功能产生,并且这些部件位于容纳腔内或其底部,本发明中将声音信号采集装置设置在凸起设置于机器人外壳的上表面的凸起结构上,以使声音信号采集装置远离机器人的噪音源,来降低机器人自身发出的噪音对声音信号采集装置的干扰,以便使机器人能更加准确的采集到用户语音控制指令。
25.另一方面,本发明还提供过一种适用于上述机器人的控制方法,该控制方法包括如下步骤:使用所述声音信号采集装置采集声音信号;过滤所述声音信号中由所述机器人自身播放的声音信号后得到有效声音信号;执行所述有效声音信号包含的控制指令。
26.可选地,“过滤所述声音信号中由所述机器人自身播放的声音信号后得到有效声音信号”的步骤包括:回采所述机器人自身播放的声音信号作为无效声音信号;从所述声音信号采集装置采集的所述声音信号中过滤所述无效声音信号后得到有效声音信号。
27.可选地,“过滤所述声音信号中由所述机器人自身播放的声音信号后得到有效声音信号”的步骤包括:判断所述机器人是否处于播音工作模式;若是,则获取所述机器人在播音工作模式下播放的声音信号作为无效声音信号;从所述声音信号采集装置采集的声音信号中过滤所述无效声音信号后得到有效声音信号。
28.可选地,所述控制方法中通过所述声音信号采集装置采集声音信号后,先对所述声音信号降噪处理,然后再过滤所述声音信号中由所述机器人播放的声音信号后得到有效声音信号。
29.该机器人的控制方法具有上述机器人的所有技术效果,本领域技术人员基于本文记载可以毫无疑义的获得,本文在此不再赘述。另外,该控制方法,可以消除声音信号采集装置采集到的无效声音信号,尤其是能消除机器人本身发出的声音信号对声音采集信号的信号采集造成的干涉,从而降低机器人自身发出的噪音对声音信号采集装置的干扰,以便机器人能更加准确的采集到用户语音控制指令。
附图说明
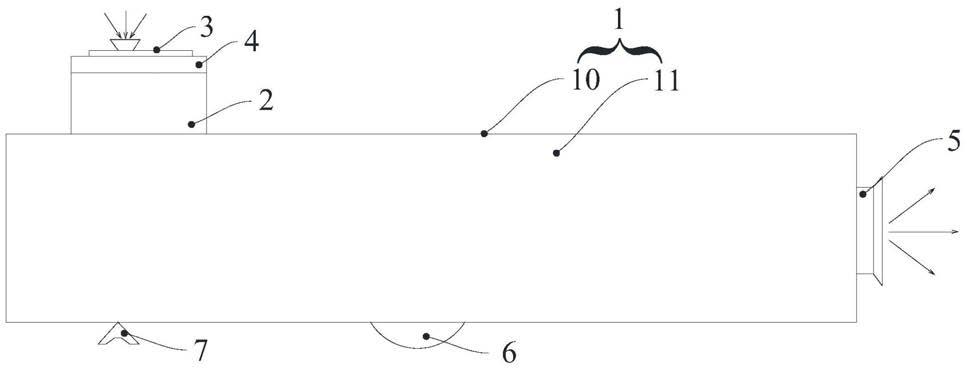
30.图1是本发明所提供的机器人一具体实施例的结构示意图;
31.图2是本发明所提供的声音信号采集装置一具体实施例的结构示意图;
32.图3是本发明所提供的机器人另一具体实施例的结构示意图;
33.图4是本发明机器人的控制方法的主要步骤流程图;
34.图5是本发明机器人的控制方法的一种详细步骤流程图;
35.图6是本发明机器人的控制方法的另一种详细步骤流程图。
36.图1至图3中各组件名称和附图标记之间的一一对应关系如下:1、机器人外壳、10上表面、11外立面、2凸起结构、3声音信号采集装置、30pcb板、31减震罩壳、310拾音孔、32麦克风芯片、33防水防尘膜、34上盖、4距离传感器、5声音信号播放装置、6驱动轮、7边刷。
具体实施方式
37.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例的附图,以扫地机器人为例对本发明实施例的技术方案进行清楚、完整地描述。当然,除了扫地机器人外,本发明的机器人还包括擦窗机器人、空气净化机器人等。在各附图中,相同的附图标记表示相同或相应的技术特征。另外,为了简明起见,对于数量多于一个的技术特征,在各附图中可能仅在一处或若干处标示。
38.需要说明的是,本文中描述机器人的结构时所采用的方位词“前”和“后”是以机器人的行驶方向为基准设定,位于行驶方向前方侧为“前”,与行驶方向背离侧为“后”侧。另外,本文中描述机器人的结构时所采用的方位词“上”和“下”是以机器人位于工作状态下时相对于工作面为基准设定,即机器人靠近工作面侧为“下”,其远离工作面侧为“上”。
39.参见图1,图1是本发明所提供的机器人一具体实施方式的结构示意图,需要说明的是图1中带箭头的实线
“→”
代表声音信号的传播方向。该机器人包括机器人外壳1、驱动元件、凸起结构2和声音信号采集装置3;其中,驱动元件设置在机器人外壳1内,其用于驱动机器人外壳1移动;凸起结构2设置在机器人外壳1的上表面10,声音信号采集装置3设置在该凸起结构2上。
40.详细地,参见图1,一般地,机器人外壳1包括顶板、环形侧板和底板,该顶板、环形立板和底板围合拼装形成容纳腔室,容纳腔室内容置有控制单元和驱动元件。另外,机器人还包括设置在机器人外壳1上的驱动轮6、边刷7、滚刷或风机等功能元件,其中,驱动轮6用于在驱动元件作用下带动机器人行驶,边刷7和滚刷在收到控制单元的信号后清扫工作面,风机则是用于在尘盒内形成负压腔,以将工作面上的灰尘、杂物等吸入尘盒除尘。需要说明的是,上述这些功能元件的结构及工作原理与现有扫地机器人基本相同,本领域技术人员基于现有技术完全可以实现,故而本文在此不再赘述。
41.机器人外壳1的顶板的上表面10凸起设置有凸起结构2。在一些实施例中,凸起结构2和顶板一体加工成型。另一些实施例中,凸起结构2和顶板分体独立加工成型,然后凸起结构2通过粘接、螺纹连接等方式固定连接在顶板的上表面10。该凸起结构2上设置了声音信号采集装置3。
42.通常情况下,机器人的自身的噪音由驱动元件、边刷7、滚刷和/或风机等功能产
生,并且这些部件位于容纳腔内或其底部,本发明中将声音信号采集装置设置在凸起设置于机器人外壳1的上表面10的凸起结构2上,以使声音信号采集装置3远离机器人的噪音源,来降低机器人自身发出的噪音对声音信号采集装置3的干扰,以便使机器人能更加准确的采集到用户语音控制指令。该用户语音控制指令包括开始扫地、播放音乐、停止扫地、去充电等,本领域技术人员可以根据机器人实际需求设定相应的功能。
43.在一些实施例中,参见图2所提供的本发明的声音信号采集装置一具体实施例的结构示意图,该声音信号采集装置3包括麦克风(mic)。详细地,在一些实施例中,该声音信号采集装置3包括pcb板30(印制电路板)、减震罩壳31和麦克风芯片32;其中,减震罩壳31设置在pcb板30上并与pcb板30围成了具有容纳腔的声音信号采集装置3外部封装,麦克风芯片32设置在该容纳腔中,减震罩壳31顶部的中心区域设置有连通外部与容纳腔的拾音孔310。pcb板30与麦克风芯片32和机器人的控制单元都通信连接,麦克风芯片32从拾音孔310采集外部的声音信号后通过pcb板30传输给控制单元,控制单元控制机器人执行声音信号包含的用户语音控制指令。
44.需要说明的是,其中,声音信号采集装置3的减震罩壳31一方面可以减少机器人工作过程中产生的震动对声音信号采集装置3的影响,另一方面减震罩壳31可以吸收来自机器人自身的噪音,而拾音孔310开设在减震罩壳31顶部的中心区域,其仅采集来自于顶部的声音信号(通常为用户发出的语音控制指令)。尤其是对于扫地机器人来说,扫地机器人一般在地面工作而用户则从高处发出语音控制,位于减震罩壳31顶部中心区域的拾音孔310能比较容易采集到用户语音控制的声音信号,而机器人自身发出的噪音能被环绕拾音孔310的减震罩壳31阻隔,能够减少其对声音信号采集装置3采集信号的干涉。在另一些实施例中,该减震罩壳31包括减震泡棉,可以理解减震泡棉不仅可以阻挡来自机器人自身的噪音进入拾音孔310,还可以吸收部分噪音。
45.继续参见图2,该声音信号采集装置3还包括防水防尘膜33,该防水防尘膜33设置在减震罩壳31上并且遮盖拾音孔310,以防止水或灰尘通过拾音孔310落到麦克风芯片32上,而影响到麦克风芯片32的采集声音信号的效果。
46.继续参见图2,本实施例中,声音信号采集装置3还包括上盖34,上盖将防震罩盖31压紧在pcb板上,并且通过螺钉(图中未示出)等连接件固定连接在凸起结构2上或距离传感器3上,从而实现声音信号采集装置3和机器人外壳1之间的固定连接关系,以防止机器人行驶过程中声音信号采集装置3从机器人外壳1上脱落。另外,上盖34的顶部中心区域上与减震罩壳31的拾音孔的对应位置也开设了拾音孔。
47.进一步地,为了增强声音信号采集装置3采集声音信号的能力,要尽量保证声音信号传播路径短宽,在一些实施例中,通过限定拾音孔310的孔径孔深比来实现上述目的,具体地,拾音孔310的孔径(d1)孔深(d2)比尽量大于1。在更加具体的实施例中,拾音孔310的孔径(d1)孔深(d2)比大于2:1。
48.为了能使机器人更好的采集到用户语音控制的声音信号,在一些实施例中,机器人至少包括三个声音信号采集装置3,并且这些声音信号采集装置3环形均匀分布。环形均布的多个声音信号采集装置3可以均衡的采集到从各个角度传输过来的声音信号,以保证所采集的用户语音控制信号的准确性和连贯性。
49.具体地,参见图3所提供的本发明的机器人的另一具体实施例的结构示意图,例
如,机器人包括三个声音信号采集装置3,这三个声音信号采集装置3环形均匀分布,即三个声音信号采集装置3位于一个圆上,每个声音信号采集装置3至圆心的距离均为该圆的半径,并且相邻两个声音信号采集装置3的之间的圆心角为120
°
(度)。并且,为了使多个声音信号采集装置3的声音信号采集能力最佳,至少三个声音信号采集装置3环形均匀分布的圆的直径位于60mm~100mm范围内。
50.在另一些实施例中,机器人包括三个声音信号采集装置3,这三个声音信号采集装置3呈三角形分布,并且三个声音信号采集装置3中一个相对于另外两个位于机器人外壳1的上表面10的前部。这三个声音信号采集装置3可以环形均布,也就是说这三个声音信号采集装置3位于三角形的外切圆上并且相邻两个声音信号采集装置3之间的圆心角为120
°
(度)。
51.当然,在另一些实施例中,这三个声音信号采集装置3无需环形均匀分布,只需保证其以一前两后的排布方式分布即可。这种排布方式的优势在于,扫地机器人向前行驶时,用户发出的语音控制指令因在空气等介质中传输延迟,机器人外壳1上表面10的前部声音信号采集装置3仅会采集到少量声音信号,而大部分声音信号需要由位于后部的声音信号采集装置3采集,在后部多设置声音信号采集装置3可以能更好的采集到声音信号,保证采集的声音信号的准确性。
52.进一步地,为了能使声音信号采集装置3采集声音信号效果最佳,在一些实施例中还给出了声音信号采集装置3选型标准,具体为:选择全向型数字麦克风,其信噪比(snr)大于64db(a),灵敏度保证
‑
26+3dbfs,声学过载点(aop)保证120db spl,总谐波失真(thd)94db spl@1khz处最好低于0.5%。
53.进一步地,在一些实施例中,机器人还包括距离传感器4,该距离传感器4设置在机器人外壳1上,并且其用于测量机器人移动方向前方障碍物和机器人之间的距离,以便两者之间的距离达到设定阈值时,机器人可以停止运动或者改变运动路径,以防止机器人和障碍物相撞。在另一些实施例中,该距离传感器4可转动的设置在机器人外壳1上,其可以相对于机器人外壳360度旋转以检测工作空间内家具、墙面等布局,继而描绘出工作空间内地图,并且根据描绘出的地图工作,以提高工作效率。
54.该距离传感器4包括dtof和lds。在一些实施例中,该距离传感器4设置在上述凸起结构2上,声音信号采集装置3则设置在距离传感器4上。由此可见,距离传感器4和声音信号采集装置3可以利用凸起结构2,无需为各自单独设置凸起,可以尽可能的简化机器人的结构,降低其制造成本。
55.而在另一些实施例中,凸起结构2包括距离传感器4,也就是说,距离传感器4直接设置在机器人外壳1的上表面上形成一个凸起结构2,而声音信号采集装置3则设置在距离传感器4,也即声音信号采集装置3设置在距离传感器4形成的凸起结构2上。距离传感器4直接设置在机器人外壳1的上表面形成凸起结构2,而声音信号采集装置3利用其距离传感器4自身特点凸起设置在机器人外壳1上,无需另外设置凸起结构,整体结构简单,成本低。
56.另一方面,距离传感器4在机器人外壳1的上表面10,可以很好地避开机器人自身的其他结构,从而能准确感应到障碍物的位置。而,声音信号采集装置3则可以尽可能的远离机器人的驱动电机、滚刷、边刷7和风机等产生噪音的部件,能降低机器人自身产生的噪音对声音信号的干涉。
57.另一些实施例中,该机器人还包括声音信号播放装置5,该声音信号播放装置5可以为扬声器(喇叭),该声音信号播放装置5设置在机器人外壳1上,并且该声音信号播放装置5和机器人的控制单元通信连接,控制单元设置有机器人的播音工作模式,比如播放音乐等。当用户通过遥控器或app控制机器人进入该播音工作模式后,存储在控制单元内的音乐通过声音信号播放装置5播放出来。
58.为了防止声音信号播放装置5播放的声音信号干涉声音信号采集装置3采集用户发出的语音控制的声音信号,在一些实施例中声音信号采集装置3的拾音孔310和声音信号播放装置5的放音孔的朝向不同方向。更为具体地,声音信号采集装置3的拾音孔310朝向垂直于所述机器人外壳1的上表面10,而声音信号播放装置5的放音孔朝向垂直于所述机器人外壳1的外立面11,也就是说,声音信号采集装置3的拾音孔310和声音信号播放装置5的放音孔的朝向成90
°
(度)夹角设置。
59.需要说明的是,通常情况下,机器人外壳1的上表面10和外立面11相互垂直设置,当然,在满足声音信号采集装置3的拾音孔310和声音信号播放装置5的放音孔的朝向不同方向的情况下,机器人外壳1的上表面10和外立面11成其他夹角设置。
60.进一步地,在一些实施例中,声音信号播放装置5位于机器人外壳1的前部,而声音信号采集装置3位于机器人外壳1的后部。而,在另一些实施例中,声音信号播放装置5位于机器人外壳1的后部,而声音信号采集装置3位于机器人外壳1的后部。机器人外壳1的前部和后部的划分标准是基于机器人外壳1的形状沿前后将其一分为二,其中,位于机器人外壳1前侧的区域为前部,位于机器人外壳1后侧的区域为后部。例如:以图2所示的实施例为例,该圆形机器人外壳1沿前后方向划分为前半圆区域和后半圆区域,将前半圆区域界定前部,将后半圆区域界定为后部。
61.可以理解,声音信号采集装置3和声音信号播放装置5中一者位于机器人外壳1的前部,另一者位于机器人外壳1的后部,以使两者之间保持足够远的距离,从而进一步地减少机器人自身播放的声音信号对声音信号采集装置3的干涉,机器人能够更加精准的采集到用户的语音控制指令并准确的执行该指令,继而能给用户提供更好的使用体验。
62.更进一步的,为了减少机器人自身播放的声音信号对声音信号采集装置3的干涉,在一些实施例中,该机器人还包括声音信号回采装置,该声音信号回采装置与机器人的控制单元和声音信号播放装置5通信连接,其用于回采声音信号播放装置5的声音信号,控制单元接受声音信号回采装置回采的声音信号,并且从声音信号采集装置3采集的声音信号中过滤回采的声音信号,再将过滤后的声音信号包含的指令传动给执行元件,控制执行元件执行该指令。
63.在一些实施例中,声音信号回采装置包括滤波式回采电路,该滤波式回采电路通过导线和机器人本体的控制单元电连接,并且通过导线和声音信号播放装置电连接。
64.除了声音信号回采装置外,在一些实施例中,机器人还包括声音信号降噪装置,该声音信号降噪装置与声音信号采集装置3和控制单元均通信连接,其用于对声音信号采集装置3采集到的声音信号进行降噪处理,以消除采集到的声音信号的杂音或无效声音信号部分。
65.除了上述机器人外,本发明还提供一种适用于上述机器人的控制方法,以消除声音信号采集装置3采集到的无效声音信号,尤其是要消除机器人本身发出的声音信号对声
音采集信号的信号采集造成的干涉。
66.详细地,本发明的适用于上述机器人的控制方法包括如下步骤:
67.s1、使用声音信号采集装置3采集声音信号;
68.其中,声音信号采集装置3采集的声音信号主要包括用户对机器人的语音控制指令,例如机器人使用声音信号采集装置3等声音信号采集装置3采集用户的语音控制所包含的声音信号。但是,实践中,机器人在工作过程中其驱动电机、边刷7、滚刷和/或风机等功能元件也能产生声音信号,或者是机器人本身也具备产生声音信号的能力,比如机器人在工作过程中或停机状态下可以播放音乐、朗读书籍等,由于声音信号采集装置3主要功能是采集用户语音控制而言,本文将机器人自身产生的这些声音信号统称为“无效声音信号”。基于此,为了消除这些无效声音信号对声音信号采集装置3采集信号的干涉,本发明的机器人的控制方法还包括如下步骤:
69.s2、过滤声音信号采集装置3采集的声音信号中由机器人自身播放的声音信号后得到有效声音信号。
70.具体地,在一些实施例中,该控制方法中实现步骤s2的方法包括如下步骤:
71.s20、回采机器人自身播放的声音信号作为无效声音信号;
72.s21、从声音信号采集装置3采集到的声音信号中过滤该无效声音信号后得到有效声音信号。
73.详细地,在机器人中设置声音信号播放装置5,该声音信号播放装置5可以为扬声器(喇叭),该声音信号播放装置5设置在机器人外壳1上,并且该声音信号播放装置5和机器人的控制单元通信连接,控制单元设置有机器人的工作模式,比如播放音乐等,当用户通过遥控器或app控制机器人进入该控制模式后,存储在控制单元内的音乐通过声音信号播放装置5播放出来。
74.该机器人还包括声音信号回采装置,该声音信号回采装置与机器人的控制单元和声音信号播放装置5通信连接,其用于回采声音信号播放装置5的声音信号,控制单元接受声音信号回采装置回采的声音信号并且从声音信号采集装置3采集的声音信号中过滤回采的声音信号,再将过滤后的声音信号包含的指令传动给执行元件,控制执行元件执行该指令。
75.在另一些实施例中,该控制方法中实现步骤s2的方法包括如下步骤:
76.s20'、判断机器人是否处于播音工作模式;
77.s21'、若是,则获取机器人在播音工作模式下播放的声音信号作为无效声音信号;
78.s22'、从声音信号采集装置3采集的声音信号中过滤该无效声音信号后得到有效声音信号。
79.此外,在另一些实施例中,本发明的控制方法中使用声音信号采集装置3采集声音信号后,先对声音信号降噪处理,然后再过滤声音信号中由机器人播放的声音信号后得到有效声音信号,以进一步地消除用户语音控制指令外其他声音信号的影响。
80.从步骤s2中得到有效声音信号后,该控制方法则执行如下步骤:
81.s3、执行该有效声音信号包含的控制指令,实现机器人与用户之间的语音互动,从而提高用户的使用体验。
82.应用场景一:
83.当前扫地机器人正在清扫地面,用户发出“播放音乐”的语音控制指令,机器人采集到该指令后开始播放存储的音乐。当然,用户也可以根据机器人内存储的音频资料点播需要的音乐,语音控制指令中只需包含该音乐名称即可。
84.应用场景二:
85.当前扫地机器人处于停机或待机状态,用户发出“扫地”的语音控制指令,机器人采集到该指令后开始根据预定路线清扫地面。
86.应用场景三:
87.当前扫地机器人正在清扫地面并且同时在播放音乐,用户发出“停止播放音乐”的语音控制指令,机器人采集到该指令并且过滤掉播放音乐产生的无效声音信号后停止播放音乐。
88.上面结合附图对本技术优选的具体实施方式和实施例作了详细说明,但是本发明并不限于上述实施方式和实施例,在本领域技术人员所具备的知识范围内,还可以在不脱离本发明构思的前提下做出各种变化。