1.本发明涉及机器人技术领域,更具体的说是一种木材加工机器人。
背景技术:
2.在木材加工方面传统的机器人更多地强调了机械臂和机械手的使用来高效的定点加工,主要强调一个主动性,实现主动操作,而对于大型圆木的加工,不仅需要执行部分进行动作,也需要圆木自身的调节以实现更高效的配合,在加工圆木时除了常见的去皮和切割等作业,根据需要也需要对圆木进行加固,这对圆木自身位置的调整要求较高。
技术实现要素:
3.本发明提供一种木材加工机器人,目的是可以调节圆木自身的位置。
4.上述目的通过以下技术方案来实现:
5.一种木材加工机器人,包括支撑床,以及支撑机构ⅰ,所述支撑机构ⅰ包括辊子ⅰ,以及转动连接在辊子ⅰ两端的带座轴承,所述支撑机构ⅰ左右设有两个,两个支撑机构ⅰ通过直线驱动机构ⅰ调节间距;其中一个辊子ⅰ通过电机ⅰ驱动实现转动。
6.还包括设置在两个支撑机构ⅰ之间的支撑机构ⅱ;所述支撑机构ⅱ包括液压缸,以及通过液压缸驱动实现升降的基座,以及两个分别转动连接在基座前后两侧的轴ⅰ,每个轴ⅰ上均固接有传送轮;两个轴ⅰ通过带轮皮带组件ⅰ实现同步传动,其中一个轴ⅰ通过电机ⅱ和带轮皮带组件ⅱ驱动实现转动。
附图说明
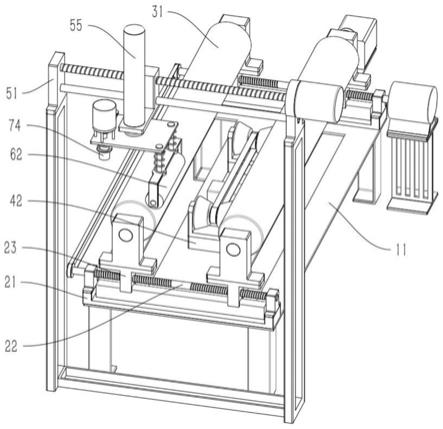
7.图1显示了一种木材加工机器人整体结构;
8.图2至10为各部分结构的拆解图。
具体实施方式
9.一种木材加工机器人,参考图1至图5,包括支撑床11、支撑机构ⅰ和支撑机构ⅱ:
10.支撑机构ⅰ包括辊子ⅰ31和带座轴承32,辊子ⅰ31的前后两端分别转动连接在两个带座轴承32内;所述支撑机构ⅰ左右对称设有两个;其中一个辊子ⅰ31通过电机ⅰ驱动实现转动,该电机ⅰ的输出轴可以与位于右侧的辊子ⅰ31固接,
11.所述直线驱动机构ⅰ包括支撑轨21、双向丝杠22和滑台23;支撑轨21前后对称设有两个,每个支撑轨21上转动连接一个双向丝杠22,双向丝杠22的前后两端分别转动连接在支撑轨21的前后两端,每个双向丝杠22的前后两侧各螺纹连接一个滑台23,滑台23滑动连接在对应的支撑轨21上,例如位于左侧的滑台23滑动连接在位于左侧的支撑轨21上,位于右侧的滑台23滑动连接在位于右侧的支撑轨21上;两个双向丝杠22通过带轮皮带组件ⅲ传动连接,其中一个通过电机ⅳ驱动实现转动;
12.支撑机构ⅱ包括液压缸41、基座42、轴ⅰ43和传送轮44;液压缸41的活动端朝上设
置,基座42固接在液压缸41的活动端的上端,基座42的前后两侧各转动连接一个轴ⅰ43,每个轴ⅰ43的左右两侧各固接一个传送轮44,两个轴ⅰ43通过带轮皮带组件ⅰ实现同步传动,其中一个轴ⅰ43通过电机ⅱ和带轮皮带组件ⅱ驱动实现转动;液压缸41的外壳固接在支撑床11的下端,液压缸41的活动端由下至上穿过支撑床11;轴ⅰ43的轴线与辊子ⅰ31的轴线垂直,传送轮44的直径由外至内减少,如位于左侧的传送轮44的左侧为外,两个传送轮44之间为内,传送轮44成锥台形;
13.将圆木置于两个辊子ⅰ31上,启动电机ⅰ带动自身驱动的一个辊子ⅰ31转动,辊子ⅰ31使圆木自转,另外一个辊子ⅰ31受圆木滚动影响适应性随动,使得圆木自转时保持轴线始终位于同一个垂直平面上以便于定点加工;
14.启动液压缸41调节传送轮44高度,传送轮44位于两个辊子ⅰ31之间,升高后使传送轮44高于两个辊子ⅰ31将圆木略微支撑起来即可,启动电机ⅱ使传送轮44转动带动圆木前后移动实现进给,定点加工较为便捷。
15.所述的加工机器人,如图6至8所示,还包括基台56、直线驱动机构ⅱ、直线驱动机构ⅲ、基台56、辊架61、辊子ⅱ62、圆杆ⅱ63、限位部64和压缩弹簧ⅰ65;
16.直线驱动机构ⅱ包括立座51、丝杠52、圆杆ⅰ53和滑座54;立座51设有两个,丝杠52左右两端分别转动连接在两个立座51上,圆杆ⅰ53两端分别固接在两个立座51上,滑座54与丝杠52螺纹连接,滑座54与圆杆ⅰ53滑动连接;还包括驱动丝杠52转动的电机
ⅴ
;启动电机
ⅴ
使丝杠52转动用于调节滑座54和基台56的左右位置,其目的是改变辊子ⅱ62和钻头72的左右位置;
17.所述直线驱动机构ⅲ包括电动缸55,电动缸55固接在滑座54上,电动缸55的活动端与基台56固接;启动电动缸55用于调节基台56的高度,其目的是改变辊子ⅱ62和钻头72的高度;
18.辊架61安装在基台56的右下方,辊子ⅱ62转动连接在辊架61上,两个圆杆ⅱ63固接在辊架61上端,限位部64固接在圆杆ⅱ63的上端,压缩弹簧ⅰ65套设在圆杆ⅱ63上,所述圆杆ⅱ63与基台56滑动连接,压缩弹簧ⅰ65的两端分别与基台56和辊架61相抵,限位部64的下端与基台56上端相抵;
19.使圆木向后移动支出一部分,对圆木支出的部分进行打磨或提前打磨完毕,将保护圆木用的可塑型的金属板材水平置于圆木上端,调节辊子ⅱ62至圆木正上方,随后使辊子ⅱ62下降下压该金属板材进行初定位,利用自攻螺丝等零件将板材与圆木接触的部分固定,随后使圆木自转,使金属板材受压随圆木自转形变至完全套装在圆木上。
20.进一步的,所述的加工机器人,如图9和10所示,还包括轴ⅱ71、钻头72、护管ⅰ73、护管ⅱ74和压缩弹簧ⅱ75:
21.轴ⅱ71优选设有两个,两个轴ⅱ71一前一后的转动连接在基台56左侧,钻头72固接在轴ⅱ71的下端;所述轴ⅱ71通过电机ⅲ驱动实现转动;所述钻头72和辊子ⅱ62设置在辊子ⅰ31的上方;
22.护管ⅰ73固接在基台56的下端,护管ⅱ74滑动连接在护管ⅰ73的外壁上,压缩弹簧ⅱ75的两端分别与基台56下端和护管ⅱ74上端的固接,一个护管ⅰ73用于包围一个轴ⅱ71,一个护管ⅱ74用于包围一个钻头72;
23.还包括检测护管ⅱ74下降距离的传感器,以及接受传感器信号用于控制电动缸55
和电机ⅲ的控制器;
24.金属板材输送时,优选的水平输送并保持高度不变,使金属板材略经过圆木的上方,而辊子ⅱ62下降下压金属板材支出于圆木的部分,使板材支出的部分弯折贴合在圆木上,此时板材为水平段和圆弧段,随后使钻头72向右移动至圆木正上方,随后使钻头72下降并转动将金属板材和圆木上钻出孔,再利用自攻螺丝等零件旋入孔中将金属板材和圆木固定。输送金属板材时可以利用框结构对板材限位,圆木与板材固定后圆木顺时针转动,板材受限位仍然向右水平运动,以利于弯折。
25.其中钻头72根据圆木的直径确定下降进给的行程,当在未达到该行程时护管ⅱ74则回弹说明在行程路线上有异物,此时控制器使钻头72停止转动并使钻头72停止进给,避免误伤操作工人的双手;
26.辊子ⅱ62能够弹性升高,当圆木直径较大时,钻头72处于圆木正上方,即圆木与金属板材的相切处,辊子ⅱ62扔位于圆木上方,此时钻头72下降切割时,辊子ⅱ62抵在圆木上可以实现回弹,避免影响钻头72进给,同时可以改变压力,对于直径较小的圆木,辊子ⅱ62的初始压力不应过大。
技术特征:
1.一种木材加工机器人,包括支撑床(11),以及支撑机构ⅰ,所述支撑机构ⅰ包括辊子ⅰ(31),以及转动连接在辊子ⅰ(31)两端的带座轴承(32),所述支撑机构ⅰ左右设有两个,两个支撑机构ⅰ通过直线驱动机构ⅰ调节间距;其中一个辊子ⅰ(31)通过电机ⅰ驱动实现转动。2.根据权利要求1所述的加工机器人,还包括设置在两个支撑机构ⅰ之间的支撑机构ⅱ;所述支撑机构ⅱ包括液压缸(41),以及通过液压缸(41)驱动实现升降的基座(42),以及两个分别转动连接在基座(42)前后两侧的轴ⅰ(43),每个轴ⅰ(43)上均固接有传送轮(44);两个轴ⅰ(43)通过带轮皮带组件ⅰ实现同步传动,其中一个轴ⅰ(43)通过电机ⅱ和带轮皮带组件ⅱ驱动实现转动。3.根据权利要求2所述的加工机器人,所述每个轴ⅰ(43)上的传送轮(44)数量为两个且左右对称设置,传送轮(44)的直径由外至内减少。4.根据权利要求3所述的加工机器人,还包括基台(56),以及驱动基台(56)左右移动的直线驱动机构ⅱ,以及驱动基台(56)实现升降的直线驱动机构ⅲ,以及安装在基台(56)右下方的辊架(61),以及转动连接在辊架(61)上的辊子ⅱ(62),以及转动连接在基台(56)左侧的轴ⅱ(71),以及固接在轴ⅱ(71)下端的钻头(72);所述轴ⅱ(71)通过电机ⅲ驱动实现转动;所述钻头(72)和辊子ⅱ(62)设置在辊子ⅰ(31)的上方。5.根据权利要求4所述的加工机器人,还包括固接在辊架(61)上的两个圆杆ⅱ(63),以及固接在圆杆ⅱ(63)上端的限位部(64),以及套设在圆杆ⅱ(63)上的压缩弹簧ⅰ(65),所述圆杆ⅱ(63)与基台(56)滑动连接,压缩弹簧ⅰ(65)的两端分别与基台(56)和辊架(61)相抵。6.根据权利要求5所述的加工机器人,还包括固接在基台(56)下端的护管ⅰ(73),以及滑动连接在护管ⅰ(73)外壁的护管ⅱ(74),以及两端分别与基台(56)下端和护管ⅱ(74)上端的压缩弹簧ⅱ(75),护管ⅰ(73)用于包围轴ⅱ(71),护管ⅱ(74)用于包围钻头(72)。7.根据权利要求6所述的加工机器人,还包括检测护管ⅱ(74)下降距离的传感器,以及接受传感器信号用于控制电动缸(55)和电机ⅲ的控制器。8.根据权利要求1所述的加工机器人,所述直线驱动机构ⅰ还包括两个支撑轨(21),每个支撑轨(21)上转动连接一个双向丝杠(22),两个双向丝杠(22)通过带轮皮带组件ⅲ传动连接,其中一个双向丝杠通过电机ⅳ驱动实现转动,每个双向丝杠(22)的两侧各螺纹连接一个滑台(23),滑台(23)滑动连接在位置对应的支撑轨(21)上;四个带座轴承(32)分别固接在四个位置对应的四个滑台(23)上。9.根据权利要求4所述的加工机器人,所述直线驱动机构ⅱ包括立座(51),以及转动连接在立座(51)上的丝杠(52),以及驱动丝杠(52)转动的电机
ⅴ
,以及固接在立座(51)上的圆杆ⅰ(53),以及与丝杠(52)螺纹连接且与圆杆ⅰ(53)滑动连接的滑座(54),所述直线驱动机构ⅲ安装在滑座(54)上。10.根据权利要求9所述的加工机器人,直线驱动机构ⅲ包括电动缸(55),电动缸(55)固接在滑座(54)上,电动缸(55)的活动端与基台(56)固接。
技术总结
本发明涉及机器人技术领域,更具体的说是一种木材加工机器人,包括支撑床,以及支撑机构Ⅰ,所述支撑机构Ⅰ包括辊子Ⅰ,以及转动连接在辊子Ⅰ两端的带座轴承,所述支撑机构Ⅰ左右设有两个,两个支撑机构Ⅰ通过直线驱动机构Ⅰ调节间距;其中一个辊子Ⅰ通过电机Ⅰ驱动实现转动。还包括设置在两个支撑机构Ⅰ之间的支撑机构Ⅱ;所述支撑机构Ⅱ包括液压缸,以及通过液压缸驱动实现升降的基座,以及两个分别转动连接在基座前后两侧的轴Ⅰ,每个轴Ⅰ上均固接有传送轮;两个轴Ⅰ通过带轮皮带组件Ⅰ实现同步传动,其中一个轴Ⅰ通过电机Ⅱ和带轮皮带组件Ⅱ驱动实现转动。目的是可以调节圆木自身的位置。目的是可以调节圆木自身的位置。目的是可以调节圆木自身的位置。
技术研发人员:韩娜妮 郑祎林
受保护的技术使用者:陇东学院
技术研发日:2021.11.22
技术公布日:2022/1/21