1.本实用新型属于智能交通安全技术领域,尤其涉及一种智能道钉设备。
背景技术:
2.随着生活水平的不断提高,可选择的出行方式越来越多,汽车作为出行方式的一种,也逐渐走进了人们的日常生活,这使得人们的交通越来越便捷。
3.近年来汽车保有量呈“井喷式”增长,道路交通压力也越来越大,道路交通拥堵也屡见不鲜。目前,在道路发生拥堵时,上游驾驶员从地图看到因前方发生拥堵,下游路段变成红色,但并不清楚下游路段具体哪个车道发生拥堵,无法提前规避,影响几个车道的通行。
技术实现要素:
4.本说明书一个或多个实施例提供一种智能道钉设备。用以解决如下技术问题:车道发生拥堵无法给予上游车辆警示的问题。
5.为解决上述技术问题,本说明书一个或多个实施例是这样实现的:
6.本说明书一个或多个实施例提供一种智能道钉设备,包括:多个智能道钉,所述多个智能道钉分布在道路的车道两侧,所述智能道钉包括电源模块、通信模块、控制模块、led灯和毫米波雷达传感器;
7.所述电源模块,与所述控制模块连接,包括太阳能电池装置和备用电池,用于向智能道钉设备供电;
8.所述通信模块,与所述控制模块连接,用于支持所述控制模块的通信功能;
9.所述毫米波雷达传感器,与所述控制模块连接,用于检测所述车道内的车辆速度;
10.所述控制模块,还与所述led灯连接,用于在所述车辆速度低于预设阈值时控制所述led灯改变为相应的颜色。
11.可选地,所述控制模块,用于在下游车道的车辆速度低于预设阈值时,根据与所述下游车道对应的所述控制模块进行通信,控制所述led灯改变为相应的颜色。
12.可选地,还包括路由模块、协调器模块;
13.所述路由模块,与第一附近范围内的多个所述通信模块连接,用于支持所述通信模块的通信功能;
14.所述协调器模块,与第二附近范围内的多个所述路由模块连接,用于支持所述路由模块的通信功能。
15.可选地,所述智能道钉设备还包括:路侧单元、中心控制平台;
16.所述路侧单元,与所述协调器模块相连,用于与所述协调器模块以及所述中心控制平台通信;
17.所述中心控制平台,与所述路侧单元相连,用于支持人机交互。
18.可选地,所述多个智能道钉之间的间隔距离不超过15米。
19.可选地,所述通信模块包括通信芯片,所述通信芯片的二十三号引脚接地,二十四号引脚接+3.3v电压,十号引脚通过第一电阻连接到+3.3v电压,十号引脚还通过非极性电容c9接地,十号引脚还连接到rst信号线,十七号引脚连接接收数据引线,十六号引脚连接发送数据引线。
20.可选地,所述控制模块包括控制芯片,所述控制芯片的一号引脚接地,二十一号引脚根据高低电位启动或关闭输出,r-ext引脚外接电阻,通过调整外接电阻值的大小调节输出电流的大小,控制led灯的亮度。
21.本说明书一个或多个实施例提供了一种智能道钉设备,通过多个智能道钉判断道路拥堵路段与拥堵车道,通过控制模块控制led灯改变颜色,给发生拥堵的车道的上游路段予以警示,提前预警,提高道路通行能力,并且能够将拥堵信息发送至云端,以备管理人员根据拥堵信息作出疏通决策。
附图说明
22.为了更清楚地说明本说明书实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本说明书中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
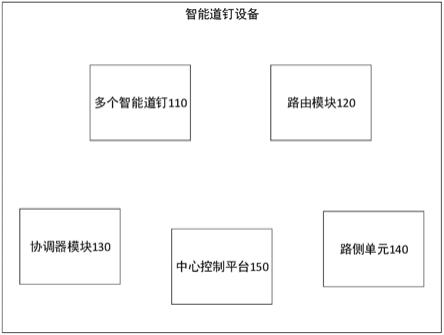
23.图1为本说明书一个或多个实施例提供的一种智能道钉设备结构示意图;
24.图2为本说明书一个或多个实施例提供的智能道钉模块结构图;
25.图3为本说明书一个或多个实施例提供的一种智能道钉设备工作示意图;
26.图4为本说明书一个或多个实施例提供的一种通信架构图;
27.图5为本说明书一个或多个实施例提供的一种通信芯片电路图;
28.图6为本说明书一个或多个实施例提供的一种控制芯片控制led灯显示电路图。
具体实施方式
29.为了使本技术领域的人员更好地理解本说明书中的技术方案,下面将结合本说明书实施例中的附图,对本说明书实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本说明书实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都应当属于本技术保护的范围。
30.以下结合附图,详细说明本说明书各实施例提供的技术方案。
31.图1为本说明书一个或多个实施例提供的一种智能道钉设备结构示意图。如图1所示,本技术提供的智能道钉设备包括:多个智能道钉110、路由模块120、协调器模块130、路侧单元140、中心控制平台150。
32.图2为本说明书一个或多个实施例提供的智能道钉模块结构图。
33.其中,多个智能道钉110包括电源模块210、通信模块220、控制模块230、led灯240和毫米波雷达传感器250。多个智能道钉安装在交通拥堵易发路段,比如人流量高的路段、交通事故易发生路段。交通拥堵易发生路段包括城市道路交通拥堵易发生路段、高速公路交通拥堵易发生路段。
34.多个智能道钉110分布在道路的车道两侧,在安装时会预先储存经纬度信息,确定每个智能道钉的具体位置。智能道钉包括电源模块210、通信模块220、控制模块230、led灯240和毫米波雷达传感器250。在初始情况下,智能道钉的led灯为绿色。
35.车道包括单向双车道、三车道、四车道、六车道等,多个智能道钉110沿车道线均匀分布,每个智能道钉之间间隔距离不超过15米,可以为单侧分布,沿车道左侧道路线分布或者沿车道右侧道路线分布,也可以为双侧分布,沿车道左右两侧道路线分布。
36.在本技术的一些实施例中,电源模块210与控制模块230连接,电源模块210包括太阳能电池装置和备用电池,用于向智能道钉设备供电。
37.其中,太阳能电池装置用于在晴天等有太阳光的情况下为智能道钉设备供电,备用电池用于在阴雨天气以及夜晚等太阳光弱或无太阳的情况下为智能道钉设备供电,太阳能电池装置能够在为智能道钉设备供电的同时,为备用电池充电。通过该方式,为智能道钉设备供电,节能环保,大幅减缓了备用电池的更换频率,节省了人工成本。
38.在本技术的一些实施例中,通信模块220与控制模块230连接,用于支持控制模块230的通信功能。通信模块包括zigbee终端节点,支持zigbee无线通信技术,适用于短距离数据无线传输。
39.在本身请的一些实施例中,毫米波雷达传感器250与控制模块230连接,用于检测车道内的车辆速度。以多个智能道钉110沿左右两侧车道线分布为例,左右两侧车道线的智能道钉中的毫米波雷达传感器检测该车道内的车辆速度,用于支持控制模块根据该车道内车辆速度判断该车道是否拥堵。
40.在本技术的一些实施例中,控制模块230与led灯240连接,用于在车辆速度低于预设阈值时控制led灯改变为相应的颜色。
41.在本技术的一些实施例中,控制模块230用于在下游车道的车辆速度低于预设阈值时,根据与下游车道对应的控制模块230进行通信,控制led灯改变为相应的颜色。
42.不同路段,不同车道对应的预设阈值不同,城市道路中,对汽车行驶速度有较为严格的限制;高速公路上不同车道对应的最低速度标准也不相同,可根据需要规定预设阈值。
43.智能道钉中的毫米波雷达传感器250检测该车道的车辆行驶速度,控制模块根230根据车辆行驶速度判断该车道是否发生交通拥堵。当该车道车辆行驶速度低于20km/h时,该控制模块230通过通信模块220与该车道上游500米范围内的智能道钉的控制模块230进行通信,控制模块230控制智能道钉的led灯240颜色由绿色变为红色。
44.图3为本说明书一个或多个实施例提供的一种智能道钉设备工作示意图。
45.该车道车辆行驶速度高于20km/h且低于40km/h时,该控制模块230通过通信模块220与该车道上游500米范围内的智能道钉的控制模块230进行通信,在检测车辆行驶速度的毫米波雷达传感器250上游200米范围内的智能道钉的控制模块230控制智能道钉的led灯240颜色由绿色变为红色,在检测车辆行驶速度的毫米波雷达传感器250上游200米至500米范围内的智能道钉的控制模块230控制智能道钉的led灯240颜色由绿色变为黄色。
46.该车道车辆行驶速度高于40km/h且低于60km/h时,该控制模块230通过通信模块220与该车道上游500米范围内的智能道钉的控制模块230进行通信,在检测车辆行驶速度的毫米波雷达传感器250上游500米范围内的智能道钉的控制模块230控制智能道钉的led灯240颜色由绿色变为黄色。
47.图4为本说明书一个或多个实施例提供的一种通信架构图。
48.在本技术的一些实施例中,智能道钉设备还包括路由模块120、协调器模块130;路由模块120与第一附近范围内的多个通信模块220连接,用于支持通信模块220的通信功能;协调器模块130与第二附近范围内的多个路由模块120连接,用于支持路由模块120的通信功能。
49.在本技术的一些实施例中,智能道钉设备还包括路侧单元140、中心控制平台150;路侧单元140与协调器模块130相连,用于与协调器模块130以及中心控制平台150通信,能够判断交通长度;中心控制平台150与路侧单元140相连,用于支持人机交互。
50.其中,路侧单员140安装在道路一侧,能够识别车辆,能够和协调器模块130、中心控制平台150进行通信,协调器模块130能够与路由模块120通信,路由模块120能够与通信模块220通信。
51.路由模块120可以为zigbee路由节点,每隔200米均匀的安装在道路线上,协调器模块130可以为zigbee协调器,每隔1000米均匀的安装在道路线上。
52.智能道钉中的毫米波雷达传感器250检测该车道的车辆行驶速度,控制模块230根据车辆行驶速度判断该车道是否发生交通拥堵。该车道车辆行驶速度低于20km/h时,该智能道钉通信模块220与路由模块120通信,路由模块120与协调器模块130通信,协调器模块130与该车道上游500米范围内的所有车道的智能道钉通信模块220通信,该车道上游500米范围内所有车道的智能道钉控制模块230控制智能道钉的led灯240颜色由绿色变为红色。
53.该车道车辆行驶速度高于20km/h且低于40km/h时,该智能道钉通信模块220与路由模块120通信,路由模块120与协调器模块130通信,协调器模块130与该车道及该车道的邻近车道上游500米范围内的智能道钉通信模块220通信,该车道及该车道的邻近车道上游200米范围的智能道钉控制模块230控制智能道钉的led灯240颜色由绿色变为红色,200米至500米范围内的智能道钉控制模块230控制智能道钉的led灯240颜色由绿色变为黄色。
54.该车道车辆行驶速度高于40km/h且低于60km/h时,该智能道钉通信模块220与路由模块120通信,路由模块120与协调器模块130通信,协调器模块130与该车道上游500米范围内的智能道钉通信模块220通信,该车道上游200米范围内的智能道钉的led灯240颜色由绿色变为红色,200米至500米范围内的智能道钉控制模块230控制智能道钉的led灯240颜色由绿色变为黄色,其他车道不受影响。
55.路侧单元140能够与协调器模块130通信,判断交通拥堵的长度。路侧单元140还能够与中心控制平台150通信,向中心控制平台150发送交通拥堵长度,便于中心控制平台150根据交通拥堵长度做出相应对策。
56.在本技术的一些实施例中,通信模块220包括通信芯片,图5为一种通信芯片电路图,通信芯片可以为f8913d芯片,f8913d芯片的接地引脚gnd(二十三号引脚)接地,v3.3(二十四号)引脚接+3.3v电压,p1.2(十号)引脚通过r14(第一电阻)连接到+3.3v电压,p1.2(十号)引脚还通过非极性电容c9接地,p1.2(十号)引脚还连接到rst信号线,tx(十七号)引脚连接接收数据引线,rx(十六号)引脚连接发送数据引线。其中,rst表示复位,tx表示发送,rx表示接收。
57.在本技术的一些实施例中,控制模块230包括控制芯片,如图6所示为控制芯片控制led灯显示电路图,控制芯片的接地引脚gnd(一号引脚)接地,enable(二十一号)引脚根
据高低电位启动或关闭输出,当oe为低电位时,启动out0-out15输出,当oe为高电位时,关闭out0-out15的输出。vdd为电源正极端,供电电压可以是3.3v或者是5.0v。r_ext(二十三号)引脚外接电阻,通过调整外接电阻的大小调节输出电流的大小,即控制led灯的亮度。电流大时led灯相较于电流小时的led灯更亮。通过该方式,只需要一个电阻便可以控制out0-out15输出的电流的大小。
58.本说明书一个或多个实施例提供了一种智能道钉设备,通过多个智能道钉判断道路拥堵路段与拥堵车道,通过控制模块控制led灯改变颜色,给发生拥堵的车道的上游路段予以警示,提前预警,提高道路通行能力,并且能够将拥堵信息发送至云端,以备管理人员根据拥堵信息作出疏通决策。
59.上述对本说明书特定实施例进行了描述。其它实施例在所附权利要求书的范围内。在一些情况下,在权利要求书中记载的动作或步骤可以按照不同于实施例中的顺序来执行并且仍然可以实现期望的结果。另外,在附图中描绘的过程不一定要求示出的特定顺序或者连续顺序才能实现期望的结果。在某些实施方式中,多任务处理和并行处理也是可以的或者可能是有利的。
60.以上所述仅为本说明书的一个或多个实施例而已,并不用于限制本说明书。对于本领域技术人员来说,本说明书的一个或多个实施例可以有各种更改和变化。凡在本说明书的一个或多个实施例的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本说明书的权利要求范围之内。