1.本发明涉及悬挂式轨道梁领域,尤其涉及悬挂式轨道三股道车辆换线系统。
背景技术:
2.悬挂式轨道交通是近些年来较为热门的轨道交通系统形式,在悬挂式轨道交通中为了方便运行列车换线也设置有换线系统,通过道岔梁衔接两端不同的方向的垛梁,三股道车辆换线系统将一个前垛梁通过道岔梁切换引导列车进入三条不同后垛梁中,现有的换线系统如专利申请202010386333.8和202110282480.5通过单个道岔梁实现换线和车辆引导,这种结构下前垛梁和道岔梁衔接处转角角度大,过车不平顺,行车速度不能太高,而且在上述文献中又涉及不同的驱动方式:齿轮驱动和推杆驱动,相较于推杆驱动,齿轮驱动更加稳定可控,但是上述文献给出的齿轮驱动方式中由于齿轮轴线垂直于地面,道岔梁受环境温度或震动等因素影响会破坏齿轮和齿条之间啮合关系,从而造成卡滞,或导致齿轮齿条啮合不完美有间隙影响道岔梁平稳运行。另外上述专利申请中行走机构中的对道岔梁提供支撑的导向轮均为刚性结构,由于装配误差、环境温度、道岔梁震动等因素造成走行机构中有部分导向轮无法与走行轨道完美接触,影响道岔梁运行的稳定和平顺。以上专利申请中除上述问题外,还存在回转装置为刚性结构无法实现误差补偿,道岔梁之间的连接装置为刚性结构无法实现误差补偿。
技术实现要素:
3.为了解决现有技术中的不足,提供一种结构合理,运行稳定,且具有对环境温度、震动等因素造成道岔梁形变补偿功能的悬挂式轨道单开车辆换线系统,本发明所采用的技术方案是:
4.一种悬挂式轨道梁三股道换线系统,包括有前垛梁、道岔梁、后垛梁以及门架梁,所述的前垛梁设置一条,所述的道岔梁和后垛梁均设置有三条,所述的道岔梁通过旋转移动使对应道岔梁将对应后垛梁和前垛梁连接起来实现换线动作,所述的门架梁至少设置两条分别靠近道岔梁两端用于悬挂道岔梁,在靠近所述后垛梁一端的门架梁与其中一条道岔梁之间设有供道岔梁绕其转动的回转装置,在靠近所述前垛梁一端的门架梁与道岔梁之间设有驱动道岔梁绕回转装置转动的回转驱动机构,在所述的门架梁和道岔梁之间设有为道岔梁提供支撑并实现行走的走行机构,在所述的前垛梁以及各后垛梁上均设有锁定补偿机构,在相邻两个所述的道岔梁之间设有连接装置;
5.所述的走行机构包括有安装在门架梁上的走行轨道和一组与道岔梁连接的滚轮组件,所述的滚轮组件包括支撑座、支撑轴和滚轮,各所述的滚轮在走行轨道上沿水平面滚动,在所述的滚轮和支撑轴之间设置有第一关节轴承;
6.所述的回转驱动机构包括有动力总成、鼓形齿轮和齿条组件,所述的鼓形齿轮设置在动力总成动力输出端,所述的动力总成安装在道岔梁上,所述的鼓形齿轮轴线指向回转装置轴心且与水平面平行,所述的齿条组件安装在门架梁上包括一组排列组合呈弧形的
直齿条;
7.所述的锁定补偿机构包括锁定装置和联动装置以及补偿板,所述的锁定装置能够实现对道岔梁的锁定或解锁动作,所述的锁定补偿机构在进行锁定或解锁动作时能够驱动联动装置带动补偿板实现垂直升降。
8.进一步的,在所述的前垛梁、道岔梁以及后垛梁衔接处设有导向轮补偿板,所述的导向轮补偿板呈齿型对接后相互配合填补缺口。
9.进一步的,所述的直齿条排列组合所呈弧形的弧心与道岔梁回转中心同心;所述的动力总成包括电机和减速器。
10.进一步的,各所述的滚轮轴心指向回转装置轴心。
11.进一步的,在远离回转装置的一端的门架梁上设有一条走行轨道,在靠近所述的回转装置的一端的门架梁上设有三条与各道岔梁位置对应的走行轨道。
12.进一步的,所述的走行轨道呈弧形且弧心与回转装置中心同心。
13.进一步的,所述的回转装置包括上固定座和下固定座,在所述的上固定座和下固定座之间设有第二关节轴承。
14.进一步的,所述的上固定座设有限位第二关节轴承外圈的内腔,所述的下固定座上设有能卡入第二关节轴承内圈的回转轴;在所述的上固定座与回转轴之前设有密封圈。
15.进一步的,所述的上固定座包括上固定柱和上固定法兰,所述的内腔设置在上固定柱内;所述的下固定座包括下固定柱和下固定法兰,所述的回转轴设置在下固定柱上。
16.进一步的,在所述的上固定柱与上固定法兰以及下固定柱与下固定法兰之间均设有一组加强筋。
17.进一步的,所述的回转轴与下固定柱为一个整体。
18.进一步的,所述的回转轴通过法兰与下固定柱连接在一起。
19.在所述的上固定柱端部设有防止第二关节轴承从内腔脱落的挡圈,所述的密封圈设置在挡圈和回转轴之间。
20.进一步的,在所述的内腔设有限位凸台,在所述的上固定柱端部安装有将第二关节轴承顶紧在限位凸台上的挡圈。
21.进一步的,在所述的挡圈和第二关节轴承外圈之间设有轴承压套。
22.进一步的,所述的连接装置用于将相邻两个道岔梁连接在一起,在相邻两个所述的道岔梁之间至少设置有一对连接装置,这对所述的连接装置分别靠近道岔梁两端将这对相邻的道岔梁连接在一起,这对所述的连接装置中至少包括有一个活动连接件,所述的活动连接件包括一对分别与相邻两个道岔梁固连的底座,在各所述的底座上均设有第三关节轴承,在这对所述的第三关节轴承之间设置有连接杆。
23.进一步的,所述的连接杆长度可调,在至少一个所述的底座与道岔梁连接一侧设有斜面。
24.进一步的,所述的连接杆包括有螺纹套管,在所述的螺纹套管两端分别螺纹连接有螺纹杆,各所述的螺纹杆分别与所处一侧第三关节轴承连接,在各所述的螺纹杆上还设置有锁死螺母。
25.进一步的,这对所述的连接装置中还包括有固定连接件,所述的固定连接件包括有中间桩,在所述的中间桩两端连接有分别与相邻两个道岔梁连接的第一连接板和第二连
接板。
26.进一步的,所述的第一连接板和第二连接板与中间桩通过法兰连接,所述的第一连接板和第二连接板中至少一个设有斜面;在所述的中间桩与第一连接板和或第二连接板之间设有垫板。
27.进一步的,所述的活动连接件设置在道岔梁行走距离较大一端,所述的固定连接件设置在道岔梁行走距离较小的一端。
28.进一步的,所述的联动装置和补偿板在轨道梁两侧对称设置有一对。
29.进一步的,所述的锁定装置包括推力杆、导向座、锁定座以及锁定销,所述的锁定销与推力杆连接且滑动设置在导向座内,所述的推力杆能够推动锁定销插入锁定座内实现对道岔梁的锁定。
30.进一步的,所述的推力杆为电动推杆或液压杆。
31.进一步的,所述的联动装置包括滑道、连杆、提升杆,所述的连杆与锁定装置连接在一起且滑动设置在滑道内,所述的锁定装置能够带动连杆沿滑道移动,所述的提升杆两端分别与连杆和补偿板铰接;在轨道梁侧壁上沿垂直方向还设有导向槽,所述的提升杆与补偿板铰接处铰接件滑动设置在导向槽内。
32.进一步的,在所述的补偿板上设有与提升杆铰接的吊耳,所述的吊耳位于补偿板中线上。
33.进一步的,所述的补偿板与提升杆铰接处的铰接销轴固连,所述的铰接销轴位于导向槽内一端为矩形滑块或具有平面的销轴。
34.进一步的,在所述的前垛梁、后垛梁以及道岔梁端面底部设有延伸出端面的支撑筋条,在所述的补偿板底部设有能卡在轨道梁和道岔梁支撑筋条上的挡板。
35.采用上述结构的换线系统,三条道岔梁分别对接三个后垛梁实现换线,使后垛梁和前垛梁过渡更加平顺,而且道岔梁通过回转方式进行三股道车辆换线,避免道岔梁移动距离过大造成的运行不稳定,同时避免了衔接处缝隙过大导致的车辆运行噪音大等问题,走行机构的滚轮通过第一关节轴承能够补偿因环境温度、震动和装配误差造成的滚轮与走行轨道间不能完全接触的问题,使滚轮自适应与走行轨道的配合关系,使滚轮与走行轨道完全接触,从而提高道岔梁回转过程中的运行稳定性;回转驱动机构采用鼓形齿轮,且鼓形齿轮轴心与水平面平行消除因道岔梁伸缩造成的行走机构运行不稳定的问题,进一步提高运行稳定性;锁定补偿机构实现联动,在锁定和补偿通过一个动力源同时实现。
附图说明
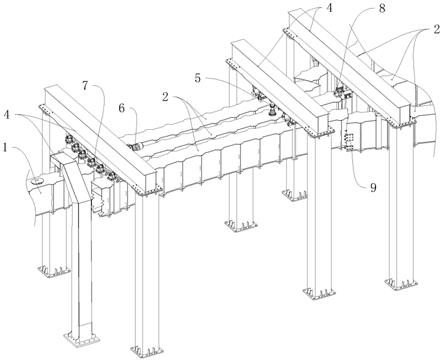
36.图1为本发明换线系统总体结构示意图;
37.图2为本发明走行机构结构示意图;
38.图3为本发明走行机构滚轮组结构示意图;
39.图4为本发明走行机构滑动导轨结构示意图;
40.图5为本发明回转驱动机构结构示意图;
41.图6为本发明回转驱动机构齿条组件结构示意图;
42.图7为本发明回转驱动机构动力总成结构示意图;
43.图8为本发明回转装置结构示意图;
44.图9为本发明回转装置剖视图;
45.图10为本发明连接装置连接道岔梁的连接结构示意图;
46.图11为本发明连接装置活动连接件结构示意图;
47.图12为本发明连接装置活动连接件剖视图;
48.图13为本发明连接装置固定连接件结构示意图;
49.图14为本发明锁定补偿机构结构示意图;
50.图15为本发明锁定补偿机构仰视角结构示意图;
51.图16为本发明导向轮补偿板结构示意图。
具体实施方式
52.为了能够更好的理解本发明技术方案,下面结合附图和具体实施例对本发明技术方案做进一步的详细说明。
53.如图1所示的悬挂式轨道梁三股道换线系统包括有前垛梁1和后垛梁3,由于该技术方案涉及三股道车辆换线系统,前垛梁1设计为一条,后垛梁3设计为三条,为提高行车平顺,减小前垛梁和后垛梁过度阶段的过弯角度,对应的道岔梁2也设计为三条,道岔梁2与后垛梁3为一一对应关系,如图1所示外侧的两个曲线后垛梁3通过外侧两个曲线道岔梁2分别与前垛梁1连接,中间位置的直线后垛梁3 通过中间位置的直线道岔梁2与前垛梁1连接,换线过程通过道岔梁 2的回转运动使后垛梁3和前垛梁1通过对应的道岔梁2连通起来,引导车辆实现换线,即车辆能够从前垛梁1分别驶入后垛梁3中任意一条车道,或者从任意一条后垛梁3均能够驶入前垛梁1,由于采用三条道岔梁2分别对接三条后垛梁3使得道岔梁2回转的角度较小,且道岔梁2与前垛梁1和后垛梁3衔接处更合理,因此该换线系统中道岔梁2起到了重要的作用,是将车辆引导进入正确线路的关键环节,该换线系统中设置有至少一对门架梁4实现对道岔梁2悬挂支撑,为了能够使道岔梁2绕固定点做回转运动,在道岔梁2和门架梁4之间设置回转装置5,回转装置5提供回转中心定位点,使道岔梁2以绕回转装置5为中心进行转动,由于道岔梁2设计为三条,为了平衡以及两侧道岔梁转动角度相同,将回转装置2设置在位于中间位置的道岔梁2上,在道岔梁2与门架梁4之间还设置有回转驱动机构6,通过回转驱动机构6提供动力驱动道岔梁2绕回转装置5转动,为了能够使道岔梁2悬挂并沿固定路线行走,在门架梁4和道岔梁2之间设置有走行机构7,由于回转装置5仅设置在其中一个道岔梁2上,为了使三个道岔梁2能够同步同心做回转运动,需要将三个道岔梁2 连接起来,因此在相邻两个道岔梁2之间还设置有连接装置,连接装置不仅用于道岔梁2连接实现同步运动,而且能够确保相邻两个道岔梁2之间的位置关系始终保持不变。为了使道岔梁2完成换线操作后定位准确且防止松动,在前垛梁1和后垛梁3上均设有锁定补偿机构 8用于将与前垛梁1和后垛梁3对接后的道岔梁2锁死定位,同时对道岔梁与前垛梁和后垛梁之间的行车轮行走部位空隙进行补偿,提高行车轮的稳定性,该方案中为简化表述将前垛梁和后垛梁统称为轨道梁,在此说明以方便理解,除了对行车轮部位补偿,还在前垛梁、后垛梁、道岔梁上设有对导向轮行走部位间隙补偿的导向轮补偿板。
54.下面结合附图对该换线系统中各装置和机构结构做进一步的说明:
55.走行机构:
56.如图2所示的走行机构7,包括有走行轨道7-1和一组滚轮组件 7-2,其中行走行轨
道7-1连接固定在门架梁4上,滚轮组件7-2则与道岔梁2连接,通过滚轮组件7-2实现道岔梁2悬挂。
57.如图3所示滚轮组件7-2包括有支撑座7-2-1、支撑轴7-2-2和滚轮7-2-3,支撑座7-2-1与道岔梁2连接,支撑轴7-2-2设置在支撑座7-2-1上用于安装滚轮7-2-3,在滚轮7-2-3与支撑轴7-2-2之间设置第一关节轴承7-2-4,其中滚轮7-2-3与走行轨道7-1配合能够在走行轨道7-1上沿水平面滚动。由于装配误差、受热变形以及行车产生震动的影响,如果滚轮7-2-3与支撑轴7-2-2直接刚性连接会造成滚轮7-2-3与走行轨道7-1不能完全接触,例如其中一个滚轮 7-2-3安装位置过低对道岔梁2已经形成了支撑,其余滚轮7-2-3则无法与走行轨道7-1接触或者完全接触,从而使该滚轮组件7-2受力过大造成支撑不稳定,同时影响行走稳定性,而在支撑轴7-2-2与滚轮7-2-3之间设置第一关节轴承7-2-4后,各滚轮7-2-3均能够自适应调整从而实现与走行轨道7-1完全接触,从而对道岔梁2提供更好的支撑,使行走更加稳定。
58.如图1所示道岔梁通过旋转方式行走时,各滚轮7-2-3的轴心与回转装置5的轴心相交,这样行走过程滚轮才能更好的滚动,当然这里的所指的滚轮轴心与旋转轴心相交为理论上的,实际装配中不可能如此完美,但是主旨是要使滚轮轴心指向回转装置5的轴心,从而使滚轮能够沿着弧线行走,符合道岔梁2旋转特性尽量减滚轮滑动摩擦。走行轨道7-1面积足够大的情况下,滚轮7-2-3如果有足够行走空间则走行轨道形状规格不需要限定,而如果采用如图2所述的走行轨道7-1,仅在滚轮7-2-3行走过的区域设置走行轨道7-1,则需要将走行轨道7-1设置成弧形,且使走行轨道7-1弧心与道岔梁2旋转中心同心。
59.该换线系统中由于道岔梁2远离旋转中心和靠近旋转中心的两端行走距离不同,远离旋转中心一端移动距离较大,有足够的安装空间因此在远离回转装置5一端的门架梁4上安装一条走行轨道7-1即可,而靠近旋转中心一端行走距离较小,需要将走行轨道7-1设置三段分别与各道岔梁2位置对应。无论是远离远离回转装置5一端的走行轨道7-1还是靠近回转装置5一端的走行轨道7-1均呈弧形,并且保持弧形的弧心与道岔梁2回转中心同心。
60.回转驱动机构
61.如图5包括有安装在道岔梁2上动力总成6-1,在门架梁4上安装齿条组件6-3,在动力总成6-1上安装有鼓形齿轮6-2与齿条组件 6-3啮合,在动力总成6-1驱动下鼓形齿轮6-2沿齿条组件6-3行走时带动道岔梁2绕其回转装置5转动。
62.如图6所示齿条组件包括有一组直齿条6-3-1,这组直齿条6-3-1 排列形成弧形,如图7所示动力总成6-1包括电机和减速器,鼓形齿轮6-2安装在减速器上。如图5和图1所示为了能够实现沿弧线行走,鼓形齿轮6-2轴线与水平面平行且指向回转装置5轴心,而直齿条 6-3-1所组成的弧形的弧心与道岔梁回转中心同心。虽然采用的是直齿条6-3-1拼接排列而成的齿条组件6-3,但是由于采用的是鼓形齿轮6-2,因此在小范围内鼓形齿轮6-2和直齿条6-3-1齿牙之间能够保持啮合关系,而且在设计齿条组件6-3时直齿条数量越多,且各直齿条长度越短则排列而成的齿条组件6-3弧形越趋于规则的弧形(这里需要注意一下,按照严格意义上该齿条组件的排列形状应该是多边形一部分,但是从总体上看趋于弧形,因此此处我们可以认为其是弧形)。这样设置后的齿条组件6-3和鼓形齿轮6-2配合时即使道岔梁 2伸缩变形,鼓形齿轮6-2沿轴向移动后依然不影响鼓形齿轮6-2与各直齿条6-3-1之间的啮合关系。因此该驱动机构既能够满足回转驱动,又能够消除道岔梁变形对驱动机构
2有两个分别设置在两个底座10-1上,在两个第三关节轴承10-2之间设置有连接杆10-3。以图11给出的具体实施例中底座10-1包括有安装板10-1-1和双耳 10-1-2,安装板10-1-1上设置有一组固定孔10-1-3,通过螺栓连接或者铆接将安装板10-1-1与道岔梁固定连接,第三关节轴承10-2内圈通过销钉10-4与双耳10-1-2连接,而第三关节轴承10-2外圈则与连接杆10-3固定连接,当然图中仅给出一种参考实施例,具体结构中第三关节轴承10-2不一定采用双耳10-1-2的连接形式与底座 10-1连接,而且还可以让第三关节轴承外圈与底座10-1连接,第三关节轴承10-2内圈与连接杆10-3连接,等等多种具体结构形式的变化可以根据实际需要进行设计,但总体方案始终通过第三关节轴承 10-2和连接杆10-3将两个底座10-1连接在一起,这样通过该活动连接件10将相邻两个道岔梁2连接在一起后在既能保证相邻两个道岔梁之间的间距和位置关系,又能够通过第三关节轴承10-2释放自由度,当道岔梁2因温度或受到震动发生形变时第三关节轴承10-2 能够释放相应的应力,减小道岔梁的内应力集中,从而避免刚性连接损坏连接结构,提高道岔梁的使用寿命。如果在连接结构中仅设置一个活动连接件10,那么该活动连接件10最好设置在道岔梁2间距较大的一端,或者是道岔梁2活动距离较大的一端,一般在道岔梁2距离回转装置较远的一端设置活动连接件10。而且采用该活动连接件 10时不需要考虑道岔梁的结构形状(直线道岔梁或曲线道岔梁),通过第三关节轴承10-2能够使底座10-1自适应道岔梁结构形状,而如果道岔梁弧度过大超出第三关节轴承10-2自适应范围,则需要在底座10-1上设置斜面以适应与该道岔梁的安装配合,该斜面选择性设置在与弧度较大的道岔梁一侧的底座上安装,如果两侧都是弧形道岔梁则两侧都可以选择安装斜面。
72.为了能够适应不同间距的道岔梁,该活动连接件10中的连接杆 10-3能够实现长度调节,具体结构如图12所示包括有螺纹套管 10-3-1和一对螺纹杆10-3-2,螺纹套管10-3-1两端通过螺纹配合分别与两个螺纹杆10-3-2连接,螺纹杆10-3-2与第三关节轴承10-2 固定连接,其中两个螺纹杆10-3-2上的螺纹旋向相反,在旋拧螺纹套管10-3-1时便能够使两个螺纹杆10-3-2通过伸出或者缩进螺纹套管10-3-1实现连接杆10-3的长度调整,在各螺纹杆10-3-2上还设置有锁死螺母10-3-3,长度调整好后,通过拧紧锁死螺母10-3-3使连接杆10-3长度锁定,避免震动造成长度变化改变道岔梁之间的间距和位置关系。当然图中给出的仅是一种实施例,实际可以将螺纹杆 10-3-2和螺纹套管10-3-1位置互换,即中间设置螺纹杆10-3-2两端与第三关节轴承10-2连接的部件设置为螺纹套管10-3-1,同样锁死结构也不一定采用锁死螺母10-3-3,还可以采用顶丝等常规锁死结构进行锁死。
73.在连接结构中还存在设置有固定连接件的形式,如图13所示的固定连接件11,包括有中间桩11-1,在所述的中间桩11-1两端连接有第一连接板11-2和第二连接板11-3,第一连接板11-2和第二连接板11-3能够分别与相邻两个道岔梁固定连接。为了适应不同结构形状的道岔梁,第一连接板11-2和第二连接板11-3可以根据道岔梁结构形状设置斜面以适应弧形道岔梁轮廓,从而方便与道岔梁连接,为了能够适应轨道间距,在中间桩11-1与第一连接板11-2和或第二连接板11-3之间设置有垫板11-4,通过增加垫板11-4或改变垫板 11-4厚度实现对固定连接件11的长度调整,从而消除装配误差适应道岔梁之间间距。
74.锁定补偿机构
75.该换线系统中道岔梁2通过移动实现与轨道梁的对接,道岔梁2 移动完成后与轨道梁对接时需要进行锁死定位,避免车辆运行过程中震动造成道岔梁2的偏移,同时还要对
道岔梁2和轨道梁之间的的伸缩缝进行补偿,为了能够实现道岔梁2和轨道梁之间的锁定并对伸缩缝进行补偿,该锁定补偿机构8包括锁定装置8-1和联动装置8-2以及补偿板8-3,当道岔梁2移动到与轨道梁对接的位置后,锁定装置 8-1便能够将道岔梁2和轨道梁锁死定位,而在锁死过程中通过锁定装置8-1驱动联动装置8-2带动补偿板8-3便能够实现对伸缩缝缺口位置的补偿,同理锁定装置8-1解锁过程中又能够驱动联动装置8-2 带动补偿板8-3脱离伸缩缝缺口位置,给道岔梁移动让位,从而不会阻挡道岔梁的移动,在锁定装置8-1锁定和解锁过程中补偿板8-3实现升降。
76.具体的结构如图14所示,锁定装置8-1包括推力杆8-1-1、导向座8-1-2、锁定座8-1-3以及锁定销8-1-4,推力杆8-1-1和导向座8-1-2固定在轨道梁上,锁定座8-1-3则设在道岔梁上,锁定销 8-1-4滑动设置在导向座8-1-2内与推力杆8-1-1连接,推力杆8-1-1 能够驱动锁定销8-1-4在导向座8-1-2内移动,当道岔梁与轨道梁对接后推力杆8-1-1便能够驱动锁定销8-1-4插入锁定座8-1-3内从而实现对轨道梁和道岔梁2锁定动作,解锁过程与之相反,即通过推力杆8-1-1带动锁定销8-1-4脱离锁定座8-1-3实现解锁,该推力杆 8-1-1为电动推杆或液压杆等直移动装置均能够实现。
77.联动装置8-2则包括滑道8-2-1、连杆8-2-2、提升杆8-2-3,滑道8-2-1设置轨道梁上,连杆8-2-2与锁定装置8-1连接,参考图 14即连杆8-2-2与推力杆8-1-1连接,推力杆8-1-1运动时能够带动连杆8-2-2在滑道8-2-1内移动,提升杆8-2-3两端分别与连杆 8-2-2和推力杆8-1-1铰接在一起,在轨道梁一侧还设有导向槽 8-2-4,导向槽8-2-4垂直设置,提升杆8-2-3与补偿板8-3铰接处铰接销轴滑动设置在导向槽8-2-4内,为避免补偿板8-3绕与提升杆 8-2-3铰接处转动,提升杆8-2-3与补偿板8-3铰接处铰接销轴端部设置矩形滑块或者该铰接销轴为具有平面的销轴,铰接销轴与导向槽 8-2-4配合实现防转,即补偿板8-3与铰接销轴固连,提升杆8-2-3 与铰接销轴活动连接,而铰接销轴置于导向槽8-2-4内的一端设置矩形滑块或具有平面的销轴,既能够防止补偿板8-3转动,又能保证提升杆8-2-3与补偿板的铰接关系,除了该防转结构,下面还提供了一种防转结构,即补偿板8-3上设置与提升杆8-2-3铰接的吊耳8-3-1 的位置,当吊耳8-3-1处于补偿板8-3中线上时,由于补偿板8-3以吊耳8-3-1位中心两侧平衡便能够实现防转,避免翘尾或翘头影响道岔梁运行。当推力杆8-1-1移动时能够带动连杆8-2-2沿滑道8-2-1 移动,连杆8-2-2移动使带动提升杆8-2-3驱动补偿板8-3动作,补偿板8-3移动通过导向槽8-2-4引导实现升降。
78.如图15所示由于动力轮通过补偿板8-3会对比补偿板8-3产生一定的冲击,并且施加一定的压力,为了避免该冲击损坏联动装置 8-2,在道岔梁和轨道梁底部均延伸出一段支撑筋条12,补偿板8-3 落下进入补偿位置时底部能够受到支撑筋条的支撑从而给补偿板提供足够的支撑力,以抵消动力轮通过时对补偿板8-3及联动装置8-2 的冲击力。而为了对补偿板8-3提供更好的限位,在补偿板8-3底部还设有限位板8-3-2,当补偿板8-3落入补偿位时,限位板8-3-2能够卡在支撑筋条12两侧实现对补偿板8-3的限位。
79.如图14所示由于补偿板8-3对轨道梁和道岔梁两侧伸缩缝都需要进行补偿,因此联动装置8-2以及补偿板8-3在轨道梁两侧对称设置一对,具体结构与上述结构一致。
80.导向轮补偿板
81.如图16所示在道岔梁2、前垛梁1以及后垛梁3对接一端设置导向轮补偿板9,导向轮补偿板9设置在道岔梁2、前垛梁1以及后垛梁3侧壁上呈齿形,当道岔梁2与前垛梁1和后
垛梁3对接后,导向轮补偿板9呈齿型对接后相互配合填补缺口,从而对对接位置出的缝隙进行补偿,因为如果为直线缝隙导向轮经过时震动较大,而采用斜线配合的缝隙导向轮适中有支撑能够减小震动。
82.该换线系统中集成上述装置和机构,在回转装置、连接装置、走行装置中均采用了关节轴承,能够实现自适应调整位置关系,补偿道岔梁因温度、震动因素造成的配合误差,提供稳定的支撑和运行条件,回转驱动机构的鼓形齿轮与齿条组件的安装位置也能够适应道岔梁的伸缩形变,提供稳定的驱动,以上各装置和机构结合从整体上提高了悬挂轨道换线系统的稳定运行。