1.本实用新型涉及一种摊铺机料斗自动收合装置及摊铺机。
背景技术:
2.摊铺机是一种用于对公路基层和面层各种材料进行摊铺作业的施工设备。摊铺机工作时,是由摊铺机的料斗承接物料运输车倾倒的物料,然后由刮板输料系统将混合料输送到摊铺机后方的料槽中,再由搅龙系统将混合料输送至摊铺机两侧的工作面,从而完成摊铺作业。
3.在摊铺机施工行进过程中,操作人员需要实时观察料车及料斗中物料存量,进而引导料车施工及控制料斗开合,对料槽中的物料进行及时的补充。这种传统施工控制方法,给操作人员增添了很大的工作量。尤其是在野外连续施工作业时,要求操作人员长时间紧盯料车及料斗中的物料存量,造成操作人员长时间精神处于高度紧张中,增大其劳动强度。同时,依靠人工掌控料斗中料位存量也存在较大误差变量,对料槽物料补充缺少精确控制。
技术实现要素:
4.针对如上所述的技术问题,本实用新型旨在提出一种摊铺机料斗自动收合装置。本实用新型的摊铺机料斗自动收合装置能够精准地对摊铺机料槽进行补料,减小补料误差,同时能够减小操作人员的工作量。
5.根据本实用新型的第一方面,提供了一种用摊铺机料斗自动收合装置,包括:设置在摊铺机上的控制机构,所述控制机构包括:料车引导构件,所述料车引导构件能够控制料车的起斗、降斗;料斗引导构件,所述料斗引导构件能够控制料斗的开斗和合斗;和运算处理装置,所述运算处理装置与所述料车引导构件和料斗引导构件均连接,从而控制所述料车引导构件和料斗引导构件进行动作。以及监测机构,所述监测机构包括用于监测料车的位置及料车内的物料余量的料车监测构件,以及用于监测料斗内的物料余量的料斗监测构件。
6.其中,所述监测机构与所述运算处理装置连接,以将监测数据反馈给运算处理装置。
7.在一个优选的实施例中,所述料车监测构件包括用于监测料车位置的距离传感器、用于监测料车内的物料高度的第一高度传感器,以及用于监测料斗内的物料高度的第二高度传感器。
8.在一个优选的实施例中,所述运算处理装置构造成在料车内物料高度高于阈值且料斗内物料高度低于阈值时控制料车处于起斗状态,控制所述料斗处于开斗状态。
9.在一个优选的实施例中,所述运算处理装置构造为在料车和料斗内物料高度同时高于或低于阈值时控制料车处于降斗状态,控制所述料斗处于合斗状态。
10.在一个优选的实施例中,所述运算处理装置还包括设置在摊铺机上的警报装置,所述警报装置设置为在料车内物料高度低于阈值时发出警报。
11.在一个优选的实施例中,所述运算处理装置还与料车相连接,以控制料车的前进速度。
12.在一个优选的实施例中,还包括设置在所述摊铺机的靠近料车的一侧的立杆,所述第一高度传感器、第二高度传感器及距离传感器设置在所述立杆上。
13.在一个优选的实施例中,所述第一高度传感器、第二高度传感器及距离传感器设置在所述立杆上侧1/3-1/4位置处。
14.根据本实用新型的第二方面,提供了一种摊铺机,所述摊铺机包括根据权利要求1-8中任一项所述的摊铺机料斗自动收合装置。
附图说明
15.下面将参照附图对本实用新型进行说明。
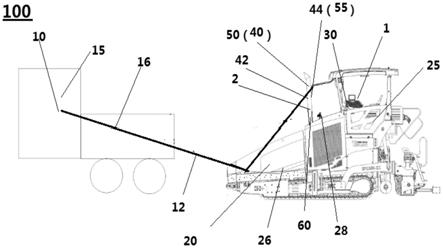
16.图1显示了根据本实用新型的一个实施例的摊铺机料斗自动收合装置的示意图。
17.在本技术中,所有附图均为示意性的附图,仅用于说明本实用新型的原理,并且未按实际比例绘制。
具体实施方式
18.下面通过附图来对本实用新型进行介绍。
19.图1显示了根据本实用新型的一个实施例的摊铺机料斗自动收合装置100。如图1所示,所述摊铺机料斗自动收合装置100包括控制机构1。所述控制机构1包括设置在料车15上的料车引导构件10。所述引导构件15能够控制料车的前进速度及根据需要控制料车15上的车箱16起斗或降斗动作,并保持起斗或降斗的状态。
20.同时,所述控制机构1还包括设置在摊铺机25上的料斗引导构件20,所述料斗引导构件20能够根据需要控制摊铺机25开斗和合斗动作,并使摊铺机料斗26保持开斗或合斗状态。
21.除此以外,所述控制机构1还包括设置在摊铺机25上的运算处理装置30。所述运算处理装置30同时与料车引导构件10及料斗引导构件20相连通,使得所述运算处理装置30能够向料车引导构件10及料斗引导构件20发出指令,控制所述料车引导构件10及料斗引导构件20在不同的情况下保持相应的状态或进行相应的动作。
22.如图1所示,所述料斗自动收合装置100还包括设置在摊铺机25上的监测机构2。所述监测机构2包括料车监测构件40,所述料车监测构件40能够监测料车10的位置及料车15的车箱16内所剩余的物料数量并将料车15的位置信息及车箱16内剩余物料的信息传递给运算处理装置30。
23.同时,所述监测机构2还包括设置在摊铺机25上的料斗监测构件50。所述料斗监测构件50能够监测料斗26内剩余物料的数量信息,并将料斗26内剩余物料的数量信息传递给运算处理装置30。
24.在一个优选的实施例中,所述料车监测构件40设置为距离传感器42及第一高度传感器44。所述距离传感器42能够监测摊铺机25和料车15之间的距离。通过二者之间的距离能够确认料车15相对于摊铺机25的位置。所述第一高度传感器44能够监测料车10的车箱16内剩余物料的高度。容易理解,通过监测车箱16内剩余物料的高度可以间接得出箱16内剩
余物料的数量。
25.同理,所述料斗监测构件50设置为第二高度传感器55。所述第二高度传感器55能够监测料斗26内剩余物料的高度进而得出料斗26内剩余物料的数量。
26.在本实用新型中,所述运算处理装置30设置为一个能够对数据进行分析及运算处理的控制软件。所述运算处理装置30在得到料车监测构件40及料斗监测构件50所反馈的剩余物料信息及位置信息后,能够分析所述信息并对料车引导构件10及料斗引导构件20发出指令,控制料车引导构件10及料斗引导构件20进行相应动作或保持相应状态。这一过程将在下文中进行详细地描述。
27.当第一高度传感器44和第二高度传感器55所监测的物料高度同时高于提前设定好的阈值,即所述料车10的车箱16内剩余物料的数量和料斗26内剩余物料的数量同时高于设定值的第一状态时,所述运算处理装置30能够发出控制指令,使得所述料车10处于降斗的状态,并使所述料斗26处于合斗状态。此时料斗26和车箱16内的物料余量充足,摊铺机处于正常工作状态。
28.当第一高度传感器44所监测的物料高度高于提前设定好的阈值且第二高度传感器55所监测的物料高度低于设定阈值的第二状态时,所述运算处理装置30能够发出控制指令,使得所述料车10进行升斗动作并处于升斗的状态,使所述料斗26进行开斗动作并处于开斗状态。此时车箱16内的物料余量充足,料斗26内的物料余量不足,摊铺机处于加料状态。容易理解,通过设置加料的时间可以对单次加料的数量进行精准的控制。当加料结束后,所述运算处理装置30能够控制料车15进行降斗动作,同时控制所述料斗26进行合斗动作,使得所述摊铺机回复并保持第一状态。
29.在一个优选的实施例中,在所述摊铺机上还设置有报警装置28,所述报警装置28与所述运算处理装置30相连通。当第一高度传感器44的物料低于提前设定好的阈值,即所述车箱16内的物料余量低于设置值时,所述运算处理装置30能够向报警装置28发出指令,控制报警装置28发出警报,提醒操作人员对料车15内的物料进行补充或更换料车。
30.需要说明的是,所述第一高度传感器44和第二高度传感器55所设定的高度阈值可以是同一阈值,也可以是不同阈值,工作人员可以进行根据现场需要自由的设定,在这里不做限定。
31.同时,所述料斗26及车箱16内剩余物料的数量也可以由其他传感器(例如重力传感器)进行监测,在本实用新型中对传感器的种类选择不做限制。
32.另一方面,当所述距离传感器42将料车15与摊铺机25之间的距离信息反馈给运算处理装置30后,所述运算处理装置30能够分析所述距离。由此,在料车与摊铺机对接的过程中,所述运算处理装置30能够根据距离传感器42所反馈的信息调整料车15的移动方向,通过控制料车15的前进与后退完成料车15与摊铺机25的对接,并保证料车15的车箱16和摊铺机25的料斗26二者之间的相对距离始终保持在一个合理的范围内,从而避免料车加料时物料洒出,造成资源的浪费。
33.如图1所示,在一个优选的实施例中,所述摊铺机料斗自动收合装置100还包括设置在所述摊铺机25靠近料车15一侧的立杆60。所述第一高度传感器44、第二高度传感器55及距离传感器42同时都设置在所述立杆60上。由此,一方面可以简化摊铺机25的结构,提高摊铺机25的集成水平,另一方面也可以简化数据传输线路。优选地,所述第一高度传感器
44、第二高度传感器55及距离传感器42设置在所述立杆上侧1/3-1/4的位置处,从而避免所述传感器及数据传输线路阻挡摊铺机25内的工作人员的视线。
34.以下简述根据本实用新型的摊铺机料斗自动收合装置100的工作过程。
35.本实用新型的摊铺机料斗自动收合装置100用于安装在摊铺机25上。在摊铺机25进行摊铺作业的过程中,所述第一高度传感器44和第二高度传感器55能分别实时监测料车15和料斗26内剩余物料的数量并反馈给运算处理装置30。所述运算处理装置30能够实时分析数据并控制料车引导构件10及料斗引导构件20进行相应动作或保持相应状态。
36.当所述料斗26及车箱16内剩余物料的高度同时高于设定好的阈值时,所述运算处理装置30能够发出指令使得料车10处于降斗的状态,所述料斗26处于合斗状态;当第一高度传感器44所监测的物料高于提前设定好的阈值且第二高度传感器55所监测的物料高度低于设定阈值时,所述运算处理装置30能够发出指令使得料车10进行升斗动作,所述料斗26进行开斗动作,对料斗26内的物料进行补充。待物料补充结束后,所述运算处理装置30能够使得料斗26重新回复并保持合斗状态,同时使得所述料车15重新回复并保持降斗状态。
37.同理,所述距离传感器42能够监测所述料车15和摊铺机25之间的距离并传递给运算处理装置30,使得所述运算处理装置30能够发出指令给料车引导构件10。由此,通过控制料车10的前进速度可以使得所述料车15和摊铺机25的距离保持在设定范围内。
38.最后应说明的是,以上所述仅为本实用新型的优选实施方案而已,并不构成对本实用新型的任何限制。尽管参照前述实施方案对本实用新型进行了详细的说明,但是对于本领域的技术人员来说,依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。