1.本发明涉及智能机器人技术领域,尤其涉及一种智能推车送餐机器人交互系统及其机器人。
背景技术:
2.机器人是自动控制器的俗称,自动控制器包括一切模拟人类行为或思想与模拟其他生物的机械。可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动,目前,随着经济社会发展,餐厅中出现了推车送餐机器人,但智能化程度较低,人工干预时间长,送餐效率低,同时送餐过程中易发生碰撞,造成食物洒出,且送餐过程中没有保温防尘措施,使食物不能保持温度同时易受到污染。
3.经检索,中国专利申请号为cn201811102724.1的专利,公开了一种智能推车送餐机器人,包括人形壳体,所述人形壳体的底部固定安装有底板,所述人形壳体与底板之间设置有安装室,所述安装室内固定安装有驱动轮,但是上述技术方案由于只是将餐盘放置在餐车上,由机器人推送至餐桌位置后由客人自行选择对应的餐盘,因此还存在客人容易选错餐盘导致送餐出现错误的问题。
技术实现要素:
4.本发明的目的是为了解决现有技术中存在的缺点,而提出的一种智能推车送餐机器人交互系统及其机器人。
5.为了实现上述目的,本发明采用了如下技术方案:
6.一种智能推车送餐机器人,包括底板和驱动盒,所述底板和驱动盒底部外壁四角位置分别设置有八个万向轮,驱动盒底部外壁设置有移动机构,驱动盒顶部外壁设置有机器人外壳,机器人外壳底部外壁设置有转动机构,机器人外壳顶部外壁设置有wifi收发装置,机器人外壳一侧外壁设置有控制面板,机器人外壳两侧外壁分别设置有两个连接杆,底板顶部外壁设置有保护框,保护框两侧外壁分别设置有两个卡接块,两个连接杆分别卡接于两个卡接块的内壁上,底板顶部外壁分别设置有两个支撑架,保护框内壁设置有两个隔板,底板和两个隔板的顶部外壁分别设置有六条电动滑轨,六条电动滑轨两个为一组,三组电动滑轨两侧外壁分别设置于保护框和两个支撑架的一侧外壁上,三组电动滑轨顶部外壁分别滑动连接有三个加热框,加热框顶部外壁开有四个卡接槽,四个卡接槽内壁卡接有放置板,放置板顶部外壁通过合页固定有顶盖,保护框一侧外壁分别通过合页固定有六个密封门,六个密封门两个为一组,三组密封门一侧外壁分别设置有三个电子锁,电子锁、电动滑轨和wifi收发装置分别与控制面板电性连接。
7.优选的:所述机器人外壳两侧外壁分别设置有两个触摸屏,机器人外壳一侧外壁设置有播音器,播音器和两个触摸屏分别与控制面板电性连接。
8.进一步的:所述移动机构包括两个安装板、两个滚轮、转轴、传动带、磁导航传感器和地标传感器,两个安装板分别设置于驱动盒的底部外壁上,转轴通过转动轴承转动连接
于两个安装板的一侧外壁上,两个滚轮设置于转轴的外壁上,传动带设置于转轴的外壁上,传动带贯穿驱动盒与驱动盒内部的传动装置转动连接,磁导航传感器和地标传感器分别设置于两个安装板的一侧外壁上,磁导航传感器和地标传感器分别与控制面板电性连接。
9.进一步优选的:所述转动机构包括上连接盘、步进电机、两个导向板和下连接盘,上连接盘设置于机器人外壳的底部外壁上,步进电机设置于上连接盘的底部外壁上,下连接盘设置于步进电机的输出轴上,下连接盘底部外壁设置于驱动盒的顶部外壁上,两个导向板设置于下连接盘的顶部外壁上,两个导向板分别滑动连接于上连接盘的底部外壁上,步进电机与控制面板电性连接。
10.作为本发明一种优选的:所述放置板顶部外壁设置有通气板,加热框内壁分别设置有温度传感器和两个电加热板,温度传感器和电加热板分别与控制面板电性连接。
11.作为本发明进一步优选的:所述机器人外壳一侧外壁分别设置有雷达传感器和摄像头,雷达传感器和摄像头分别与控制面板电性连接。
12.一种智能推车送餐机器人的交互系统,括服务器,所述服务器由数据接收单元、数据处理单元、数据发送单元和数据存储单元组成,所述数据处理单元与数据接收单元通信连接,数据发送单元与数据处理单元通信连接,数据存储单元与数据接收单元和数据发送电源通信连接,数据接收单元包括无线网卡和蓝牙收发模块。
13.在前述方案的基础上:所述数据处理单元包括编号模块、检测模块和分配模块。
14.在前述方案的基础上优选的:所述数据发送单元包括移动指令发送模块和配餐信息发送模块,移动指令发送模块根据对应餐桌和对应菜品制定出移动指令传输给智能机器人,配餐信息发送模块将对应编号智能机器人和对应的菜品发送到厨房的信息接收终端。
15.在前述方案的基础上进一步优选的:所述数据存储单元可对数据发送单元和数据接收单元接收和发送的信息进行存储,存储时限为一周,数据存储单元还包括数据调取检索模块。
16.本发明的有益效果为:
17.1.通过设置电动滑轨和电子锁,控制面板会根据接收到的指令对应相应的餐桌编号控制对应的电子锁打开,然后再控制对应的电动滑轨带动加热框移动出保护框内部,加热框在移动时会自行挤开密封门,当加热框移动到电动滑轨一端时停止移动,此时客人可直接打开顶盖,将放置在放置板顶部的餐盘端走,避免客人自行选择送餐车上的餐盘导致选错的问题出现,然后移动机构按照接收到的指令继续进行送餐。
18.2.通过设置温度传感器、电加热板和通气板,工作人员可以事先向加热框内部注入适量的水,然后通过控制面板控制电加热板对加热框内部的水进行加热,从而让热气通过通气板进入到顶盖内部对放置板顶部的餐盘进行保温,温度传感器可以将加热框内部的实时温度传输给控制面板,当加热框内部的温度到达设定温度时,控制面板控制电加热板停止加热。
19.3.通过设置编号模块、检测模块和分配模块,编号模块可对通过网络或者蓝牙连入服务器的智能机器人进行编号,从而方便对多个智能机器人进行控制,检测模块可通过对应的编号对智能机器人的储备电量进行检测,同时工作人员在对智能机器人的清洁程度检查完成后,可通过智能机器人上的控制终端向检测模块发送检测完成的清洁信号,检测装置在检测完储备电量和接收到清洁信号后,即可判定智能机器人是否可以进行送餐,并
将可以送餐的智能机器人的编号发送给分配模块,保证智能机器人能够顺利完成送餐任务。
20.4.通过设置移动指令发送模块和配餐信息发送模块,移动指令发送模块根据对应餐桌和对应菜品制定出移动指令传输给智能机器人,保证智能机器人能够按计划进行送餐,配餐信息发送模块将对应编号智能机器人和对应的菜品发送到厨房的信息接收终端,该信息接收终端可以使计算机或者智能手机,让厨房的工作人员弄够精准的将制做好的菜品放入对应的智能机器人内,提高了送餐效率。
21.5.通过设置数据存储单元,数据存储单元可对数据发送单元和数据接收单元接收和发送的信息进行存储,存储时限为一周,数据存储单元还包括数据调取检索模块,可通过输入相应的日期、餐桌编号、菜品名称和智能机器人编号进行精确查询,当送餐出现错误或者出现其他问题时,工作人员可以快速搜索出需要的送餐信息,从而快速解决出现的问题。
附图说明
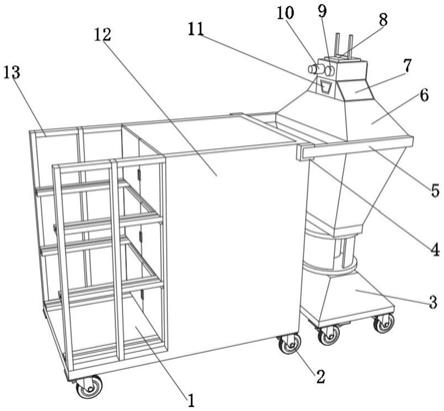
22.图1为本发明提出的一种智能推车送餐机器人的主视结构示意图;
23.图2为本发明提出的一种智能推车送餐机器人的侧视结构示意图;
24.图3为本发明提出的一种智能推车送餐机器人的顶部剖视结构示意图;
25.图4为本发明提出的一种智能推车送餐机器人的放置板结构示意图;
26.图5为本发明提出的一种智能推车送餐机器人的加热框内部结构示意图;
27.图6为本发明提出的一种智能推车送餐机器人的移动机构结构示意图;
28.图7为本发明提出的一种智能推车送餐机器人的转动机构结构示意图;
29.图8为本发明提出的一种智能推车送餐机器人的电路结构示意图;
30.图9为本发明提出的一种智能推车送餐机器人的交互系统的结构示意图。
31.图中:1底板、2万向轮、3驱动盒、4卡接块、5连接杆、6机器人外壳、7触摸屏、8wifi收发装置、9摄像头、10雷达传感器、11播音器、12保护框、13支撑架、14控制面板、15上连接盘、16导向板、17下连接盘、18密封门、19电子锁、20顶盖、21隔板、22电动滑轨、23放置板、24加热框、25通气板、26卡接槽、27电加热板、28温度传感器、29磁导航传感器、30地标传感器、31滚轮、32传动带、33转轴、34安装板、35步进电机。
具体实施方式
32.下面结合具体实施方式对本专利的技术方案作进一步详细地说明。
33.下面详细描述本专利的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本专利,而不能理解为对本专利的限制。
34.在本专利的描述中,需要理解的是,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本专利和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本专利的限制。
35.在本专利的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“设置”应做广义理解,例如,可以是固定相连、设置,也可以是可拆卸连接、设
置,或一体地连接、设置。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本专利中的具体含义。
36.实施例1:
37.一种智能推车送餐机器人,如图1所示,包括底板1和驱动盒3,所述底板1和驱动盒3底部外壁四角位置分别设置有八个万向轮2,驱动盒3底部外壁设置有移动机构,驱动盒3顶部外壁设置有机器人外壳6,机器人外壳6底部外壁设置有转动机构,机器人外壳6顶部外壁设置有wifi收发装置8,机器人外壳6一侧外壁设置有控制面板14,机器人外壳6两侧外壁分别设置有两个连接杆5,底板1顶部外壁设置有保护框12,保护框12两侧外壁分别设置有两个卡接块4,两个连接杆5分别卡接于两个卡接块4的内壁上,底板1顶部外壁分别设置有两个支撑架13,保护框12内壁设置有两个隔板21,底板1和两个隔板21的顶部外壁分别设置有六条电动滑轨22,六条电动滑轨22两个为一组,三组电动滑轨22两侧外壁分别设置于保护框12和两个支撑架13的一侧外壁上,三组电动滑轨22顶部外壁分别滑动连接有三个加热框24,加热框24顶部外壁开有四个卡接槽26,四个卡接槽26内壁卡接有放置板23,放置板23顶部外壁通过合页固定有顶盖20,保护框12一侧外壁分别通过合页固定有六个密封门18,六个密封门18两个为一组,三组密封门18一侧外壁分别设置有三个电子锁19,电子锁19、电动滑轨22和wifi收发装置8分别与控制面板14电性连接。
38.为了提高机器人的功能性;如图1、图2所示,所述机器人外壳6两侧外壁分别设置有两个触摸屏7,机器人外壳6一侧外壁设置有播音器11,播音器11和两个触摸屏7分别与控制面板14电性连接;通过设置触摸屏7和播音器11,在进行送餐时,客人可以通过触摸屏7来选择加餐、加酒水和呼叫前台等相应服务,触摸屏7会将客人的选择传输给控制面板14,控制面板14通过wifi收发装置8将信息发送给酒店内部的智能交互系统进行统一处理,同时在进行送餐时,控制面板14可以控制播音器11播放相应的语音提醒周围地客人躲避和提醒客人取餐。
39.为了有效带动驱动盒3进行移动;如图6所示,所述移动机构包括两个安装板34、两个滚轮31、转轴33、传动带32、磁导航传感器29和地标传感器30,两个安装板34分别设置于驱动盒3的底部外壁上,转轴33通过转动轴承转动连接于两个安装板34的一侧外壁上,两个滚轮31设置于转轴33的外壁上,传动带32设置于转轴33的外壁上,传动带32贯穿驱动盒3与驱动盒3内部的传动装置转动连接,磁导航传感器29和地标传感器30分别设置于两个安装板34的一侧外壁上,磁导航传感器29和地标传感器30分别与控制面板14电性连接,磁导航传感器29的型号为ccf-n08-26,地标传感器30的型号为ccf-db1;通过设置滚轮31、传动带32、磁导航传感器29和地标传感器30,传动带32可以通过驱动盒3内部的传动装置带动转轴33转动,带动两个滚轮31滚动,从而让移动机构带动驱动盒3进行移动,磁导航传感器29和地标传感器30可以感应餐厅地面铺设的磁条和地标磁条,从而让餐车能够按照提前铺设好的路线进行移动。
40.为了让驱动盒3能够进行转动从而让餐车在移动时能够自行进行转弯;如图7所示,所述转动机构包括上连接盘15、步进电机35、两个导向板16和下连接盘17,上连接盘15设置于机器人外壳6的底部外壁上,步进电机35设置于上连接盘15的底部外壁上,下连接盘17设置于步进电机35的输出轴上,下连接盘17底部外壁设置于驱动盒3的顶部外壁上,两个导向板16设置于下连接盘17的顶部外壁上,两个导向板16分别滑动连接于上连接盘15的底
部外壁上,步进电机35与控制面板14电性连接;通过设置上连接盘15、步进电机35、导向板16和下连接盘17,当需要移动机构进行拐弯时,控制面板14控制步进电机35转动相应的角度,从而带动下连接盘17转动对应的角度,让移动机构能够跟随磁条进行拐弯,提高了移动机构的灵活性,同时两个导向板16可以对下连接盘17的转动起到很好的导向作用。
41.为了能够对放置板23顶部外壁的餐盘进行保温;如图4、图5所示,所述放置板23顶部外壁设置有通气板25,加热框24内壁分别设置有温度传感器28和两个电加热板27,温度传感器28和电加热板27分别与控制面板14电性连接,温度传感器28的型号为gx18b20;通过设置温度传感器28、电加热板27和通气板25,工作人员可以事先向加热框24内部注入适量的水,然后通过控制面板14控制电加热板27对加热框24内部的水进行加热,从而让热气通过通气板25进入到顶盖20内部对放置板23顶部的餐盘进行保温,温度传感器28可以将加热框24内部的实时温度传输给控制面板14,当加热框24内部的温度到达设定温度时,控制面板14控制电加热板27停止加热。
42.为了避免餐车与附近的客人或者周围地物体发生碰撞;如图1所示,所述机器人外壳6一侧外壁分别设置有雷达传感器10和摄像头9,雷达传感器10和摄像头9分别与控制面板14电性连接,雷达传感器10的型号为a111;通过设置雷达传感器10和摄像头9,雷达传感器10可以对餐车周围地物体与餐车的距离进行感应,当距离达到设定值时,控制面板14会控制移动机构停止移动,避免餐车与附近的客人或者周围地物体发生碰撞,同时摄像头9会记录餐车在送餐时周围地状况,避免顾客刻意破坏餐车。
43.本实施例在使用时,控制面板14通过wifi收发装置8接收到智能交互系统发送过来的指令,然后控制面板14控制驱动盒3底部的移动机构根据在餐厅内部铺设好的磁条进行移动,当移动机构带动机器人外壳6推动餐车移动到安装了对应的地标磁条的餐桌时,通过设置电动滑轨22和电子锁19,控制面板14会根据接收到的指令对应相应的餐桌编号控制对应的电子锁19打开,然后再控制对应的电动滑轨22带动加热框24移动出保护框12内部,加热框24在移动时会自行挤开密封门18,当加热框24移动到电动滑轨22一端时停止移动,此时客人可直接打开顶盖20,将放置在放置板23顶部的餐盘端走,然后移动机构继续按照接收到的指令继续进行送餐,在进行送餐时,客人可以通过触摸屏7来选择加餐、加酒水和呼叫前台等相应服务,触摸屏7会将客人的选择传输给控制面板14,控制面板14通过wifi收发装置8将信息发送给酒店内部的智能交互系统进行统一处理,同时在进行送餐时,控制面板14可以控制播音器11播放相应的语音提醒周围地客人躲避和提醒客人取餐,传动带32可以通过驱动盒3内部的传动装置带动转轴33转动,带动两个滚轮31滚动,从而让移动机构带动驱动盒3进行移动,磁导航传感器29和地标传感器30可以感应餐厅地面铺设的磁条和地标磁条,当需要移动机构进行拐弯时,控制面板14控制步进电机35转动相应的角度,从而带动下连接盘17转动对应的角度,让移动机构能够跟随磁条进行拐弯,提高了移动机构的灵活性,同时两个导向板16可以对下连接盘17的转动起到很好的导向作用,工作人员可以事先向加热框24内部注入适量的水,然后通过控制面板14控制电加热板27对加热框24内部的水进行加热,从而让热气通过通气板25进入到顶盖20内部对放置板23顶部的餐盘进行保温,温度传感器28可以将加热框24内部的实时温度传输给控制面板14,当加热框24内部的温度到达设定温度时,控制面板14控制电加热板27停止加热,雷达传感器10可以对餐车周围地物体与餐车的距离进行感应,当距离达到设定值时,控制面板14会控制移动机构停止
移动,避免餐车与附近的客人或者周围地物体发生碰撞,同时摄像头9会记录餐车在送餐时周围地状况。
44.实施例2:
45.一种实施例1所述的智能推车送餐机器人的交互系统,如图9所示,包括服务器,所述服务器由数据接收单元、数据处理单元、数据发送单元和数据存储单元组成,所述数据处理单元与数据接收单元通信连接,数据发送单元与数据处理单元通信连接,数据存储单元与数据接收单元和数据发送电源通信连接,数据接收单元包括无线网卡和蓝牙收发模块,数据接收单元可以接收智能机器人通过无线网卡或者蓝牙收发模块发送的信息,然后传输给数据处理单元进行数据处理。
46.所述数据处理单元包括编号模块、检测模块和分配模块,编号模块可对通过网络或者蓝牙连入服务器的智能机器人进行编号,检测模块可通过对应的编号对智能机器人的储备电量进行检测,同时工作人员在对智能机器人的清洁程度检查完成后,可通过智能机器人上的控制终端向检测模块发送检测完成的清洁信号,检测装置在检测完储备电量和接收到清洁信号后,即可判定智能机器人是否可以进行送餐,并将可以送餐的智能机器人的编号发送给分配模块,分配模块将顾客点的菜品分配给相应编号的智能机器人,并将分配信息发送给数据发送单元。
47.进一步的,所述数据发送单元包括移动指令发送模块和配餐信息发送模块,移动指令发送模块根据对应餐桌和对应菜品制定出移动指令传输给智能机器人,配餐信息发送模块将对应编号智能机器人和对应的菜品发送到厨房的信息接收终端,该信息接收终端可以使计算机或者智能手机。
48.进一步的,所述数据存储单元可对数据发送单元和数据接收单元接收和发送的信息进行存储,存储时限为一周,数据存储单元还包括数据调取检索模块,可通过输入相应的日期、餐桌编号、菜品名称和智能机器人编号进行精确查询。
49.本实施例在使用时,数据接收单元可以接收智能机器人通过无线网卡或者蓝牙收发模块发送的信息,然后传输给数据处理单元进行数据处理,数据处理单元包括编号模块、检测模块和分配模块,编号模块可对通过网络或者蓝牙连入服务器的智能机器人进行编号,检测模块可通过对应的编号对智能机器人的储备电量进行检测,同时工作人员在对智能机器人的清洁程度检查完成后,可通过智能机器人上的控制终端向检测模块发送检测完成的清洁信号,检测装置在检测完储备电量和接收到清洁信号后,即可判定智能机器人是否可以进行送餐,并将可以送餐的智能机器人的编号发送给分配模块,分配模块将顾客点的菜品分配给相应编号的智能机器人,并将分配信息发送给数据发送单元,数据发送单元包括移动指令发送模块和配餐信息发送模块,移动指令发送模块根据对应餐桌和对应菜品制定出移动指令传输给智能机器人,配餐信息发送模块将对应编号智能机器人和对应的菜品发送到厨房的信息接收终端,数据存储单元可对数据发送单元和数据接收单元接收和发送的信息进行存储,存储时限为一周,数据存储单元还包括数据调取检索模块,可通过输入相应的日期、餐桌编号、菜品名称和智能机器人编号进行精确查询。
50.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。