一种适用于小型化to半导体的半成品移动的机械手臂
技术领域
1.本实用新型属于小型化to半导体生产制备领域,更具体的说涉及一种适用于小型化to半导体的半成品移动的机械手臂。
背景技术:
2.voa(可变光衰减器)是光通信系统中重要的器件,它通过衰减光功率来实现对信号的实时控制。反射式memsvoa(可调式光衰减器)技术相对成熟,兼有响应快、体积小、重量轻功耗低、动态衰减范围大、精度高等显著优点,被广泛使用。随着光纤网络的发展,voa的发展趋势是:低成本、体积小、高集成、响应快。随着5g通讯器件的开发和普及,许多终端企业对小型化的voa有迫切的需求。随着voa小型化,其内部各个配件也趋于小型化甚至微型化。现有技术中,原有生产线及相关设备,多具有重量大、体积大、控制速度慢等问题,不能适应于小型化的voc的生产。特别是在voc生产中应用到的机械手臂,均存在重量较大、工作速度慢、惯性大、影响生产效率的问题。
技术实现要素:
3.本实用新型的目的在于提供一种适用于小型化to半导体的半成品移动的机械手臂,整体结构简单,重量小,体积小,控制快速也精准。
4.本实用新型技术方案一种适用于小型化to半导体的半成品移动的机械手臂,包括第一驱动臂和与所述第一驱动臂一端连接的第二驱动臂,所述第一驱动臂远离所述第二驱动臂端设置有第一驱动电机,所述第一驱动电机驱动所述第一驱动臂绕所述第一驱动电机轴线旋转;所述第二驱动臂靠近所述第一驱动臂端连接有第二驱动电机,所述第二驱动电机安装在所述第一驱动臂上并驱动所述第二驱动臂绕第二驱动电机轴线旋转,所述第二驱动臂远离所述第一驱动臂端可拆卸安装有机械夹爪组件;所述第一驱动电机与第二驱动电机轴线平行设置。
5.优选地,所述第一驱动臂和第二驱动臂均呈水平状设置,所述第一驱动电机和第二驱动电机轴线竖直。
6.优选地,所述第一驱动电机底部设置有固定底座,所述第一驱动电机与所述固定底座固定安装,所述第二驱动电机底部固接有垫高支撑座,所述垫高支撑座与所述第一驱动臂固定安装。
7.优选地,所述第一驱动臂远离所述第二驱动臂端和所述第二驱动臂靠近第一驱动臂端均设置有配重块。
8.优选地,所述第二驱动臂远离所述第一驱动臂端设置有安装孔,所述安装孔上安装有机械夹爪底座。
9.优选地,所述第一驱动电机和第二驱动电机均为步进电机,所述第一驱动电机和第二驱动电机连接有控制器,所述控制器为pid控制器。
10.优选地,所述第一驱动臂长度大于所述第二驱动臂长度。
11.优选地,所述第一驱动臂长度不大于所述第二驱动臂长度。
12.本实用新型技术方案的一种适用于小型化to半导体的半成品移动的机械手臂的有益效果是:
13.1、本技术方案中,第一驱动臂和第二驱动臂连接且分别由一步进电机驱动旋转,实现安装在第二驱动臂远端的机械夹爪组件能够实现平移,实现半成品移动。
14.2、本技术方案的机械手臂,重量小,体积小,便于安装和设置,控制精准,工作行程范围大,适合小型化to半导体及配件生产中半成品的移动或周转。
附图说明
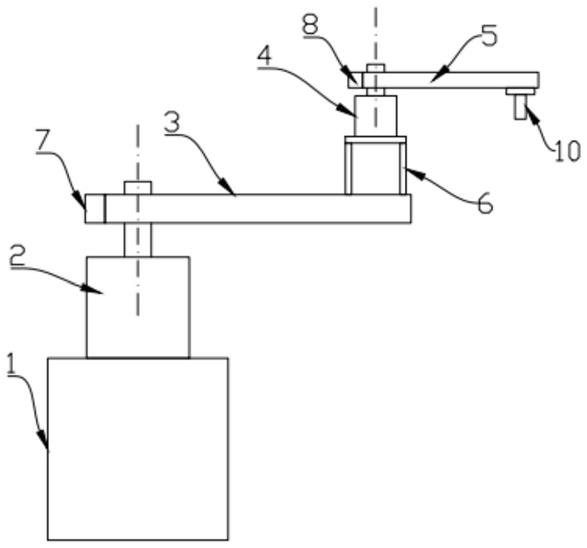
15.图1为本实用新型技术方案的一种适用于小型化to半导体的半成品移动的机械手臂的主视图,
16.图2为本实用新型技术方案的一种适用于小型化to半导体的半成品移动的机械手臂的俯视图,
17.图3为本实用新型技术方案的一种适用于小型化to半导体的半成品移动的机械手臂上的机械夹爪运动轨迹范围示意图。
具体实施方式
18.为便于本领域技术人员理解本实用新型技术方案,现结合说明书附图对本实用新型技术方案做进一步的说明。
19.如图1和图2所示,本实用新型技术方案一种适用于小型化to半导体的半成品移动的机械手臂,包括第一驱动臂3和与第一驱动臂3一端连接的第二驱动臂5。第一驱动臂3远离第二驱动臂5端设置有第一驱动电机2。第一驱动电机2驱动第一驱动臂3绕第一驱动电机2轴线旋转。第二驱动臂5靠近第一驱动臂3端连接有第二驱动电机4。第二驱动电机4安装在第一驱动臂3上并驱动第二驱动臂5绕第二驱动电机4轴线旋转。第二驱动臂5远离第一驱动臂3端可拆卸安装有机械夹爪组件10。第一驱动电机2与第二驱动电机4轴线平行设置。
20.基于上述技术方案,第一驱动电机2驱动第一驱动臂3及与第一驱动臂3安装的第二驱动电机4和第二驱动臂5同时绕第一驱动电机2的轴线旋转,同时,第二驱动电机4能够驱动第二驱动臂5绕第二驱动电机4轴线旋转,这样就实现了安装在第二驱动臂5远离第一驱动臂3端(第二驱动臂5外端)的机械夹爪组件10的移动,具体的是械夹爪组件10整体平移,即实现了对械夹爪组件10及械夹爪组件10抓取的半成品的平移,而械夹爪组件10自身可以是具有升降和旋转的结构部件,这样即能够实现将半成品转移至指定位置。械夹爪组件10采用现有技术中任一种能够实现升降、旋转等运动的结构。综上,本适用于小型化to半导体的半成品移动的机械手臂,能够实现第一步将半成品由初始位置平移至目标位置,最后通过械夹爪组件10将其放置在指定位置。
21.如图3所示,上述技术方案的适用于小型化to半导体的半成品移动的机械手臂,通过第一驱动电机2和第二驱动电机4分别对第一驱动臂3和第二驱动臂5的独立控制,以及第一驱动电机2和第二驱动电机4对两驱动臂在旋转角度上的配合,能够实现将安装在第二驱动臂5外端的械夹爪组件10平移至如图3中两点划线组成的圆环中的任意位置。
22.如图3中,设定第一驱动臂3的长度为a,第二驱动臂5长度为b,两点划线组成的圆
环的内径为|a-b|,两点划线组成的圆环的外径为a+b。例如,现需要将半成品由初始位置a移动至目标位置b。首先假设两虚线段为第一驱动臂3和第二驱动臂5的初始状态,工作过程为:分别通过第一驱动电机2和第二驱动电机4,控制第一驱动臂3和第二驱动臂5旋转至双点划线位置,此时,第二驱动臂5外端的械夹爪组件10位于目标位置b。上述过程中,第一驱动电机2和第二驱动电机4分别驱动第一驱动臂3和第二驱动臂5旋转过的角度为w或(360-w)和y或(360-y)。第一驱动电机2和第二驱动电机4分别对第一驱动臂3和第二驱动臂5的驱动可以是同时进行也可以是先后进行。
23.基于上述技术方案,本实用新型技术方案一种适用于小型化to半导体的半成品移动的机械手臂,通过两驱动臂即可实现上述案例中的大范围半成品的移动或周转。相较于现有技术,若采用常规机械手臂,一方面自动化控制要求高,成本高,且机械手臂体积或重量大,安装位置和工作空间要求大,且现有技术中常规的机械手臂多需要配合气缸实现多角度或位置的精准控制,气缸的使用,对气压设备要求高,成本高,且控制精度较低。若采用常规的横纵轴控制设备,则如上图3的示例中,则横纵轴占据的面积至少如上述点弧线组成的环中的外径尺寸的矩形面积,占据面积大,且横纵轴的控制,运动慢,效率低。
24.本技术方案中,第一驱动臂3和第二驱动臂5均呈水平状设置,第一驱动电机2和第二驱动电机4轴线竖直。第一驱动臂3和第二驱动臂5水平设置,通过械夹爪组件10在竖直方向上运动的补充,可以有效的实现半成品精准转移。
25.本技术方案中,第一驱动电机2底部设置有固定底座1,第一驱动电机2与固定底座1固定安装。固定底座1的设置,实现半成品移动的机械手臂整体的固定和安装,且确保整体设备的稳定和平衡。第二驱动电机4底部固接有垫高支撑座6,垫高支撑座6与第一驱动臂3固定安装。垫高支撑座6的设置,实现正价了第一驱动臂3和第二驱动臂5之间的高度差,避免两驱动臂在工作中出现干涉等问题。同时,垫高支撑座6的设置,也为械夹爪组件10的选择和安装提供了较大的空间,避免在工作中,械夹爪组件10与第一驱动臂3发生干涉,便于半成品的转移。
26.本技术方案中,第一驱动臂3远离第二驱动臂5端和第二驱动臂5靠近第一驱动臂3端均设置有配重块7、8。配重块7、8的设置,确保第一驱动臂3和第二驱动臂5保持平衡。
27.本技术方案中,第二驱动臂5远离第一驱动3臂端设置有安装孔11,安装孔11上安装有机械夹爪底座,械夹爪组件10与机械夹爪底座安装。
28.本技术方案中,第一驱动电机2和第二驱动电机4均为步进电机,第一驱动电机2和第二驱动电机4连接有控制器,控制器为pid控制器。步进电机通过脉冲控制,能够电机轴输出角度的精准控制。
29.本技术方案中,第一驱动臂3长度大于第二驱动臂5长度或第一驱动臂3长度不大于第二驱动臂5长度。本技术方案中,第一驱动臂3和第二驱动臂5长度更具需要选用即可。
30.本技术方案中的第一驱动臂3靠近第二驱动臂5端以及第二驱动臂5安装机械夹爪组件10端均设置呈扁平状,便于第二驱动臂5和机械夹爪组件10,第一驱动臂3和第二驱动臂5自身横截面呈矩形或圆形,一方面便于加工,另一方面成本低,重量小,便于第一驱动臂3和第二驱动臂5保持平衡和稳定。
31.本实用新型技术方案在上面结合附图对实用新型进行了示例性描述,显然本实用新型具体实现并不受上述方式的限制,只要采用了本实用新型的方法构思和技术方案进行
的各种非实质性改进,或未经改进将实用新型的构思和技术方案直接应用于其它场合的,均在本实用新型的保护范围之内。