1.本实用新型涉及自动化液体处理设备技术领域,具体地,涉及机械手技术领域,尤其是一种用于移液仪的机械手运动装置。
背景技术:
2.全自动液体处理工作站是将自动化操作与液体处理巧妙融合在一起的生物医药实验室自动化操作平台,可实现样品的自动加样、试剂分配、超微量移液以及与液体处理相关的振动、孵育等操作。可广泛应用于核酸纯化、基因蛋白质测序、克隆快速筛选、细胞培养、生物芯片样品制备等领域。而移液机构是全自动液体处理工作站的核心机构之一,用于实现液体在标准液体容器之间输送、抽提、转移等动作。
3.在现代全自动液体处理工作站的使用中,最常用的标准液体容器是例如8孔板、96孔板等标准液体容器。其中,实验室常用的96孔板等标准液体容器相邻孔间距最小为9mm,容积约0.5ml,单列分布8个孔。自动液体处理工作站,特别是其中的移液机构,需要高精度和高重复性地实现对标准液体容器的抓取和移动,以将存放液体的标准液体容器转移至预定位置。
4.现有技术中通常采用机械手抓取标准液体容器并将其转移。然而,现有的机械手运动控制精度较差,机械手的驱动系统复杂,运动控制效率较低,机械手的夹取力控制不稳定,且结构稳定性较差,无法实现移液仪器的高精度要求。此外,现有的机械手结构复杂,操作不便,且夹持部容易对标准液体容器中的液体造成污染。
技术实现要素:
5.针对如上所述的技术问题,本实用新型旨在提出一种用于移液仪的机械手运动装置,该机械手运动装置操作简单,反应速度快,能够快速将机械手移动至预定位置,并且能够精确抓取标准液体容器并将其转移至预定位置。该机械手运动装置中的机械手的夹取力度可调节,且机械手能够形成自锁,以对抓取的标准液体容器形成有效夹持,避免在运移过程中脱落。
6.为此,根据本实用新型提出了一种用于移液仪的机械手运动装置,包括:横向驱动机构;安装在所述横向驱动机构上的竖向驱动机构;连接在所述竖向驱动机构的下端的机械手单元,所述机械手单元包括基座、驱动电机、与所述驱动电机连接的传动机构,以及两个彼此间隔开的抓手,两个所述抓手分别通过传动块与所述传动机构连接,在两个所述抓手之间形成夹持部;其中,所述横向驱动机构能够驱动所述竖向驱动机构带动所述机械手单元沿横向运动,所述竖向驱动机构能够带动所述机械手单元沿竖向运动,所述机械手单元构造成能够通过所述驱动电机驱动所述传动机构带动两个所述抓手相互靠近或相互远离,从而使所述夹持部夹取或放下标准液体容器。
7.在一个实施例中,所述横向驱动机构包括:第一框架,在所述第一框架上设有沿横向延伸的第一导轨;沿横向设置在所述第一框架上的第一传动丝杠,所述第一传动丝杠的
一端设有第一电机;以及第一运动滑块,所述竖向驱动机构与所述第一运动滑块固定连接;其中,所述第一运动滑块构造成与所述第一传动丝杠适配,所述第一电机能够驱动所述第一传动丝杠转动,使得所述第一传动丝杠驱动所述第一运动滑块沿所述第一导轨运动,从而带动所述竖向驱动机构沿横向运动。
8.在一个实施例中,所述竖向驱动机构包括:第二框架,在所述第二框架上设有沿竖向延伸的第二导轨;沿竖向设置在所述第二框架上的第二传动丝杠,所述第二传动丝杠的一端设有第二电机;以及第二运动滑块,所述第二运动滑块与所述第一运动滑块固定连接;其中,所述第二运动滑块构造成与所述第二传动丝杠适配,所述第二电机能够驱动所述第二传动丝杠转动,使得所述第二传动丝杠驱动所述第二运动滑块沿所述第二导轨运动,从而使所述竖向驱动机构沿竖向运动。
9.在一个实施例中,所述第一运动滑块设有第一连接板,所述第二运动滑块设有第二连接板,所述第一运动滑块与所述第二运动滑块通过所述第一连接板与所述第二连接板形成固定连接。
10.在一个实施例中,在所述基座上设有沿横向分布的导向组件,所述导向组件包括与所述基座固定连接的直线导轨和两个适配安装在所述直线导轨上的滑块,所述滑块能够沿所述直线导轨滑动,
11.两个所述传动块与对应的所述滑块固定连接,从而使两个所述抓手仅能沿所述直线导轨相互靠近或相互远离。
12.在一个实施例中,所述传动机构构造成包括横向布置在所述基座上的螺杆和两个与所述螺杆适配连接的传动套,所述螺杆的第一端通过同步带轮组件与所述驱动电机的输出端连接,所述传动套与所述传动块固定连接,
13.所述螺杆从中部向轴向两端分别设有正向螺纹和反向螺纹,所述传动套与所述螺杆的正向螺纹或反向螺纹对应适配,转动所述螺杆能够带动所述传动套沿轴向运动,从而使所述传动块带动两个所述抓手沿所述直线导轨相互靠近或相互远离。
14.在一个实施例中,所述传动机构构造成包括竖向布置在所述基座上的丝杠,所述丝杠的一端与所述驱动电机的输出端连接,在所述丝杠上安装有与所述丝杠适配的丝杠连接座,两个所述抓手通过连杆组件与所述丝杠连接座形成连接,
15.所述驱动电机能够驱动所述丝杠转动,以带动所述丝杠连接座沿所述丝杠的轴向运动,使得所述丝杠连接座能够通过所述连杆组件带动两个所述抓手沿所述直线导轨相互靠近或相互远离。
16.在一个实施例中,所述传动机构构造成包括设置在所述驱动电机的输出端的传动齿轮,以及分别与两个所述抓手固定连接的第一传动齿条和第二传动齿条,所述第一传动齿条与所述第二传动齿条均沿横向设置且相互平行,且所述第一传动齿条和所述第二传动齿条分别与所述传动齿轮啮合,
17.所述驱动电机能够驱动所述传动齿轮转动,并带动所述第一传动齿条和所述第二传动齿条做相互靠近或相互远离运动,以带动两个所述抓手沿所述直线导轨相互靠近或相互远离。
18.在一个实施例中,所述传动机构构造成包括设置在所述驱动电机的输出端的凸轮,两个所述传动块分别设置在所述凸轮的横向两侧,且分别与所述凸轮的工作面接触配
合,两个所述传动块之间通过弹性件形成连接,
19.所述驱动电机能够驱动所述凸轮转动,在所述凸轮和所述弹性件的作用下,两个所述传动块能够带动两个所述抓手沿所述直线导轨相互靠近或相互远离。
20.在一个实施例中,所述抓手构造成包括第一本体和与所述第一本体连接的第二本体,所述第一本体与对应的所述传动块固定连接,两个所述抓手对应的第二本体相互平行且在两者之间形成所述夹持部,在所述第二本体的末端设有采用弹性材料制成的夹持块。
21.与现有技术相比,本实用新型的优点之处在于:
22.根据本实用新型的用于移液仪的机械手运动装置通过横向驱动机构和竖向驱动机构能够快速精准地调节机械手单元的空间位置,从而将机械手单元运动至预定位置,其操作简单,反应速度快,并且能够通过机械手单元精确抓取标准液体容器,进而将标准液体容器转移至预定位置。该机械手运动装置中的机械手单元的夹取力度可调节,能够有效避免对标准液体容器的表面造成损坏。机械手单元还可以形成自锁,以对抓取的标准液体容器形成有效夹持,有效避免在运移过程中脱落,非常有利于提高机械手单元抓取标准液体容器的控制精度。此外,抓手通过设置具有弹性的夹持块能够充分保证抓手对标准液体容器的夹取,进一步提高了机械手单元夹取的可靠性。
附图说明
23.下面将参照附图对本实用新型进行说明。
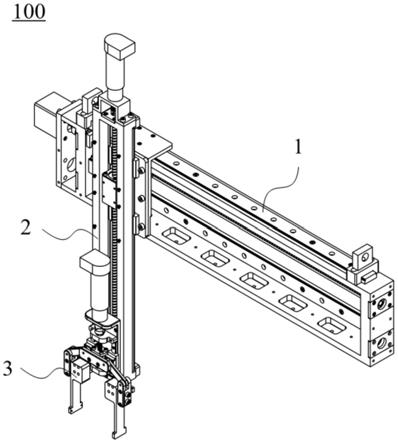
24.图1和图2显示了根据本实用新型的用于移液仪的机械手运动装置的不同视角的结构。
25.图3是图1所示机械手运动装置的爆炸视图。
26.图4显示了图1所示机械手运动装置中的机械手单元在实施例一中的结构。
27.图5显示了图1所示机械手运动装置中的机械手单元在实施例二中的结构。
28.图6显示了图1所示机械手运动装置中的机械手单元在实施例三中的结构。
29.图7显示了图1所示机械手运动装置中的机械手单元在实施例四中的结构。
30.在本技术中,所有附图均为示意性的附图,仅用于说明本实用新型的原理,并且未按实际比例绘制。
具体实施方式
31.下面通过附图来对本实用新型进行介绍。
32.在本实用新型中,需要说明的是,将图2中的水平方向定义为横向,将图2 中的垂直方向定义为竖向,将图2中垂直于纸面的方向定义为纵向。还需说明的是,术语“上”、“下”、“前”、“后”、“左”、“右”、等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
33.图1和图2显示了根据本实用新型的用于移液仪的机械手运动装置100的不同视角的结构。如图1和图2所示,机械手运动装置100包括横向驱动机构1、安装在横向驱动机构1上的竖向驱动机构2,以及连接在竖向驱动机构2的下端的机械手单元3。机械手单元3包括驱动电机4、与驱动电机4连接的传动机构5,以及两个在横向上彼此间隔开分布的抓手6,两
个抓手6分别通过传动块7与传动机构5连接,在两个抓手6的横向之间形成有夹持部。横向驱动机构1能够驱动竖向驱动机构2带动机械手单元3沿横向运动,竖向驱动机构2能够带动机械手单元3沿竖向运动,机械手单元3构造成能够通过驱动电机4驱动传动机构5 带动两个抓手6相互靠近或相互远离,从而使夹持部能够夹取标准液体容器(见图7)并将其移动到预定位置后放下。
34.如图2和图3所示,横向驱动机构1包括第一框架11、安装在第一框架11 上的第一导轨12、安装在第一框架11上的第一传动丝杠13、用于驱动第一传动丝杠13转动的第一电机14,以及第一运动滑块15。第一导轨12和第一传动丝杠13均沿横向设置在第一框架11上。第一运动滑块15构造成与第一传动丝杠 13适配,其能够随第一传动丝杠13的转动而沿第一导轨12滑动。竖向驱动机构 2通过第一运动滑块12与横向驱动机构1形成连接。通过第一电机14能够驱动第一传动丝杠13转动,使得第一传动丝杠13驱动第一运动滑块15沿第一导轨 12运动,从而带动竖向驱动机构2沿横向方向运动,以调节机械手单元3在横向上的位置。
35.在本实施例中,第一电机14通过构造为板状的第一电机安装座固定安装在第一框架11的一端(图2中的左端)。第一传动丝杠13沿横向延伸安装在第一框架11上,且两端分别与第一框架11转动连接。第一电机14的输出端与第一传动丝杠13的一端(图2中的左端)通过联轴器固定连接,由此,能够通过第一电机14驱动第一传动丝杠13转动。
36.如图2和图3所示,竖向驱动机构2包括第二框架21、安装在第二框架21 上的第二导轨22、安装在第二框架21上的第二传动丝杠23、第二电机24,以及第二运动滑块25,第二导轨22和第二传动丝杠23均沿竖向设置在第二框架21 上。第二运动滑块25构造成与第二传动丝杠23适配,其能够随第二传动丝杠23 的转动而沿第二导轨22滑动。第二运动滑块25与第一运动滑块12固定连接,从而使竖向驱动机构2与横向驱动机构1形成连接。机械手单元3安装在第二框架21的下端。通过第二电机24能够驱动第二传动丝杠23转动,使得第二传动丝杠23驱动第二运动滑块25沿第二导轨22运动,从而带动机械手单元3沿竖向方向运动,以调节机械手单元3在竖向上的位置。
37.在本实施例中,第二电机24通过构造为“几”字形的第二电机安装座固定安装在第二框架11的上端。第二传动丝杠23沿竖向延伸安装在第二框架21上,且两端分别与第二框架21转动连接。第二电机24的输出端与第二传动丝杠23 的上端通过联轴器固定连接,由此,能够通过第二电机24驱动第二传动丝杠23 转动。
38.在一个实施例中,第一运动滑块15设有第一连接板151,第二运动滑块25 设有第二连接板251。第一运动滑块15与第二运动滑块25通过第一连接板151 与第二连接板251形成固定连接。第一连接板151与第二连接板251例如可以通过螺栓螺母组件固定连接。
39.第一电机14和第二电机24,以及驱动电机4均采用步进电机。机械手运动装置100在工作时,通过横向驱动机构1和竖向驱动机构2调节机械手单元3的空间位置,从而能够将机械手单元3运动至预定位置。
40.根据本发明,机械手单元3还包括基座31,驱动电机4设置在基座31上,驱动电机4用于为传动机构5提供动力。在基座31上还设有沿横向分布的导向组件8,导向组件8包括与基座31固定连接的直线导轨和两个适配安装在直线导轨上的滑块。直线导轨在基座31上沿横向延伸分布,滑块能够沿直线导轨滑动。两个传动块7与对应的滑块固定连接,在一个实
施例中,传动块7通过螺栓紧固件与滑块形成固定连接。机械手单元3在工作时,当两个抓手6相互靠近或相互远离的过程中,一方面,导向组件8能够对两个抓手6形成导向,另一方面,导向组件8能够保证两个抓手6只能沿横向相对靠近或远离,从而保证夹持部的夹持力均匀作用于标准液体容器200的侧壁面,以实现稳定夹取标准液体容器200。
41.根据本发明,传动机构5构造成能够在驱动电机4提供的驱动力下,使两个传动块7带动两个抓手6沿导向组件8中的直线导轨相互靠近或相互远离。下面根据不同的实施例,具体介绍传动机构5。
42.实施例一:
43.图4显示了机械手单元3在实施例一中的结构。如图4所示,传动机构5构造成包括沿横向布置在基座31上的螺杆51和两个与螺杆51适配连接的传动套 52,螺杆51的第一端通过同步带轮组件与驱动电机4的输出端连接,传动套52 与传动块7固定连接。螺杆51从中部向轴向两端分别设有正向螺纹和反向螺纹,传动套52与螺杆51的正向螺纹或反向螺纹对应适配,转动螺杆51能够带动传动套52沿轴向运动,从而使传动块7带动两个抓手6沿导向组件8中的直线导轨相互靠近或相互远离。由此,实现通过机械手100的夹持部夹取或放下标准液体容器200。
44.在本实施例中,螺杆51通过两个间隔开分布的支撑座53安装在基座31上。如图3所示,支撑座53构造成矩形板状结构,并且支撑座53通过固定件与基座 31固定连接。螺杆51通过轴承(未示出)与支撑座53形成转动连接。
45.根据本实用新型,同步带轮组件包括设置在驱动电机4的输出端的第一传动带轮54,在螺杆51的第一端(图4中的右端)设有第二传动带轮55,第一传动带轮54与第二传动带轮55通过同步带56形成传动连接。由此,通过驱动电机4 能够驱动第一传动带轮54转动,第一传动带轮54通过同步带56驱动第二传动带轮55同步转动,从而驱动螺杆51转动。控制驱动电机4正反转,从而能够控制螺杆51正转和反转。
46.如图4所示,两个抓手6分别通过一个传动块7和传动套52与螺杆51适配连接。传动套52的内壁构造成能够与螺杆51上的正向螺纹或反向螺纹适配的内螺纹,从而在转动螺杆51时能够使相应的传动套52沿螺杆51轴向运动。
47.在本实施例中,传动块7设有贯穿孔,传动块7通过贯穿孔套装在传动套52 上。在一个实施例中,贯穿孔的一部分构造成内六方结构,传动套52的端部固定有螺母,螺母适配安装到内六方结构中,并且通过螺母座盖将螺母固定安装在内六方结构中,从而使传动块7与传动套52形成固定连接。当然,可以理解,传动套52的外壁页可以构造成外多面体,传动块7的贯穿孔可以构造成能够与传动套52适配的内多边形孔。传动块7通过贯穿孔套装在传动套52上,从而使两者形成固定连接。
48.实施例二:
49.图5显示了机械手单元3在实施例二中的结构。如图5所示,传动机构构造成包括竖向布置在基座301上的丝杠9,丝杠9的一端(图5中的上端)与驱动电机40的输出端连接,在丝杠9上安装有与丝杠9适配的丝杠连接座91,两个抓手60通过连杆组件92与丝杠连接座91形成连接。驱动电机60能够驱动丝杠 9转动,以带动丝杠连接座91沿丝杠9的轴向运动,使得丝杠连接座91能够通过连杆组件92带动两个抓手60沿导向组件80相互靠近或相互远离。
50.在本实施例中,丝杠9通过两个在竖向上间隔开分布的支撑座93安装在基座301
上。如图5所示,丝杠9设置在基座301的前端面上。支撑座93构造成“凸”字形结构。支撑座93通过固定件与基座301固定连接。在支撑座93上设有通孔,丝杠9的两端分别通过轴承(未示出)对应安装在相应的支撑座93的通孔中,从而使丝杠9与支撑座93形成转动连接。
51.在一个实施例中,丝杠连接座91构造成包括主体部分和设置在主体部分的横向两侧的连接板,两侧的连接板对称分布,且分别沿横向向外延伸。主体部分呈长方体形。主体部分的中部设有沿竖向延伸的贯通孔,贯通孔构造成能够与丝杠9上的外螺纹适配,由此,通过转动丝杠9能够使丝杠连接座91沿丝杠9的轴向做往复运动。连接板的作用将在下文介绍。
52.为了保证丝杠连接座91在运动过程中的稳定性,在基座301上还设有沿竖向分布的竖向导向装置94。如图5所示,竖向导向装置94包括对称分布在丝杠 9的横向两侧的竖向直线导轨,以及适配安装在竖向直线导轨上的竖向滑块。竖向直线导轨例如可以通过螺栓螺母紧固件与基座301形成固定连接。竖向滑块能够沿竖向直线导轨滑动。丝杠连接座91通过两侧的连接板分别与对应的竖向滑块固定连接。丝杠9驱动丝杠连接座91沿竖向导向装置94做往复运动,竖向导向装置94能够对驱动丝杠连接座91形成有效导向,并能够避免驱动丝杠连接座 91与基座301接触,非常有利于保证丝杠9与丝杠连接座91形成的传动结构的稳定性,这有利于提高机械手单元30的控制精度。
53.根据本实用新型,如图5所示,连杆组件92包括与丝杠连接座91固定连接的压块921,以及两个连接在压块921的横向两侧的连杆922。传动块70固定连接在对应的抓手60的横向外侧。压块921、连杆922,以及传动块70共同构成了连杆组件92。在一个实施例中,传动块70例如可以通过螺栓紧固件与抓手60 固定连接。连杆922的两端分别与压块921和传动块70铰接。
54.在本实施例中,压块921与丝杠连接座91的主体部分固定连接。压块921 沿横向方向布置。压块921的横向两端相对于主体部分向外伸出,从而在压块921 的横向端部与丝杠连接座91的连接板之间形成了第一铰接连接部。连杆922的两端分别设有铰接孔,用于安装铰接轴。连杆922的上端通过铰接轴与第一铰接连接部形成铰接连接。传动块70的上端相对于抓手60的上端向外伸出,并在传动块70的上端形成了第二铰接连接部。连杆922的下端通过铰接轴与传动块70 的第二铰接连接部形成铰接连接。由此,丝杠连接座91沿丝杠9运动能够依次通过压块921、连杆922和传动块70带动两个抓手60沿着导向组件中的直线导轨相互靠近或相互远离。
55.实施例三:
56.图6显示了机械手单元3在实施例三中的结构。如图6所示,传动机构构造成包括设置在驱动电机400的输出端的传动齿轮101,以及分别与两个抓手600 固定连接的第一传动齿条102和第二传动齿条103,第一传动齿条102与第二传动齿条103均沿横向设置且相互平行,且第一传动齿条102和第二传动齿条103 分别与传动齿轮101啮合。驱动电机400能够驱动传动齿轮101转动,并带动第一传动齿条102和第二传动齿条103做相互靠近或相互远离运动,以带动两个抓手600沿直线导轨相互靠近或相互远离。
57.如图6所示,第一传动齿条102沿横向延伸分布,并且第一传动齿条102的齿牙朝上而与传动齿轮101啮合。第一传动齿条103同样沿横向延伸分布,并且第一传动齿条103齿牙朝下而与传动齿轮101啮合。由此,通过传动齿轮101的转动能够使第一传动齿条102与第一
传动齿条103在横向上做相互靠近或相互远离运动。
58.根据本实用新型,第一传动齿条102和第二传动齿条103分别通过传动块700 与对应的抓手600固定连接。由此,传动齿轮101的转动能够使第一传动齿条102 与第一传动齿条103分别通过相应的传动块700同时带动两个抓手600在横向上做相互靠近或相互远离运动。
59.如图6所示,传动块700构造成包括连接座701和与连接座701固定连接的连接板702。连接板702与连接座701垂直。连接座701用于与相应的抓手600 固定连接,且连接座701固定连接在抓手600的横向外侧。连接板702用于与相应的第一传动齿条102和第二传动齿条103固定连接。
60.实施例四:
61.图7显示了机械手单元3在实施例四中的结构。如图7所示,传动机构构造成包括连接在驱动电机4000的输出端的凸轮110。驱动电机4000固定安装在基座3001上。在一个实施例中,驱动电机4000沿纵向安装在基座3001上,驱动电机4000设置在基座3001的后端面上,且驱动电机4000的输出轴穿过基座3001 而沿纵向伸出。凸轮110处于基座3001的前端面,凸轮110设置在两个抓手6000 的横向之间。两个传动块7000分别设置在凸轮110的横向两侧,两个传动块7000 的横向内端面分别与凸轮110的工作面接触。两个传动块7000之间通过弹性件 111形成连接。驱动电机4000能够驱动凸轮110转动,在凸轮110和弹性件111 的作用下,两个传动块7000能够带动两个抓手6000沿直线导轨相互靠近或相互远离。
62.在一个实施例中,弹性件111例如可以为伸缩弹簧。伸缩弹簧的两端分别通过固定件固定连接在传动块7000的上端面上。
63.如图7所示,传动块7000构造成包括第一部分和固定连接在第一部分的下端的第二部分。第一部分和与第二部分均构造成长方体形,且第一部分的纵向厚度大于第二部分的纵向厚度,由此,在传动块7000的内端面上形成有端面朝下的台阶,台阶形成于第一部分和与第二部分的连接处。在安装时,台阶抵靠在导向组件的滑块的上端面上,且第二部分与滑块固定连接。同时,第一部分对应处于凸轮110的横向两侧,并且第一部分的横向端面与凸轮110的工作面向接触。弹性件111的两端分别固定连接在第一部分的上端面。
64.在本实施例中,第一部分的横向宽度小于第二部分的横向宽度,并且在传动块7000的第二部分的横向外侧设有沿竖向延伸的安装槽。抓手6000适配安装到安装槽中,从而使抓手6000对应固定连接在传动块7000的横向外侧。
65.根据本实用新型,在两个传动块7000的横向外侧对应设有限位板112,限位板112与基座3001固定连接,用于对传动块7000的横向运动形成限位。同时在弹性件111的共同作用下能够有效避免传动块7000相互远离超出行程范围。
66.根据本实用新型,如图4所示,抓手6构造成包括第一本体61和与第一本体61连接的第二本体62,第一本体61与对应的传动块7固定连接,两个抓手6 对应的第二本体62相互平行且在两者之间形成夹持部,在第二本体62的末端设有采用弹性材料制成的夹持块63。
67.在一个实施例中,如图4和图7所示,抓手6可以构造成l型结构,第一本体61与第二本体62垂直。第一本体用于与传动块7固定连接。两个抓手6对应的第二本体相互平行,并且在两者之间形成夹持部。优选地,第二本体的长度设置成大于第一本体的长度。这样保证抓手6能够充分夹持标准液体容器200。此外,抓手6的这种结构非常有利于夹取标准液体容器
能够充分保证抓手6对标准液体容器200的夹取,进一步提高了机械手单元3夹取的可靠性。
76.最后应说明的是,以上所述仅为本实用新型的优选实施方案而已,并不构成对本实用新型的任何限制。尽管参照前述实施方案对本实用新型进行了详细的说明,但是对于本领域的技术人员来说,依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。