1.本发明涉及声学测试领域,具体涉及一种声学检测的机械手控制系统。
背景技术:
2.声学测试用于对产品进行噪声测量和声学特性测量;相关标准(iso3745、iso3746、iso3744、gb3767等)对测试规定的声场环境下,根据待测物尺寸,设定测量距离,麦克风点位坐标,通过测得声学参数,评估产品的相关声学性能。
3.传统声学测试需要手动测量麦克风与待测物的距离,以及手动调节麦克风支架和麦克风的空间点位,调节时间长,操作繁琐。为了解决上述问题,现有技术中,提供了一种机械测距且自动精准定位的麦克风架设台。但此麦克风架设台使用中,在需要对待测物多个侧面进行声学检测时,无法使麦克风环绕待测物地对待测物进行测量;而必须由人工移动麦克风架设台至规定位置后,麦克风架设台才能发挥其作用。但此麦克风架设台质量沉重且体积庞大,不便甚至难以移动。
技术实现要素:
4.本发明所要解决的技术问题是:提供一种便于机械手定位的声学检测的机械手控制系统。
5.为了解决上述技术问题,本发明采用的一种技术方案为:一种声学检测的机械手控制系统,包括测试房间、机械手和计算机系统;
6.所述机械手包括转轴、连接杆、单轴转向关节、夹具和电机;
7.所述连接杆包括第一杆和第二杆;所述单轴转向关节包括第一关节、第二关节和第三关节;所述电机包括转轴电机、第一电机、第二电机和第三电机;
8.所述转轴可以轴旋转地竖直地设置于测试房间的房顶,所述第一杆的一端通过第一关节连接转轴,另一端通过第二关节连接第二杆;所述夹具通过第三关节连接第二杆;
9.所述转轴与转轴电机连接;所述第一电机、第二电机和第三电机分别连接并驱动第一关节、第二关节和第三关节;
10.所述电机包括输出轴和角度传感器,所述角度传感器设置在输出轴上;
11.所述夹具上设有两个的激光测距器,所述激光测距器包括激光发射头,两个所述激光测距器的激光发射头的朝向互相垂直;
12.所述计算机系统包括处理器、伺服控制器和显示屏;所述处理器、显示屏、电机、激光测距器和伺服控制器电连接。
13.本发明的有益效果在于:本发明提供的声学检测的机械手控制系统中,首先通过手动操作伺服控制器,控制转轴和单轴转向关节运动,调整夹具角度,使其中一个激光测距器垂直朝向地面,另一激光测距器垂直朝向待测物表面,激光测区器将测得的数据传送于处理器,所述处理器同时也接收角度传感器的传输的信息。
14.本发明提供的声学检测的机械手控制系统,处理器以激光测距器的数据建立与待
测物的相对坐标系,以运算模块以各连接杆长度和单轴转向关节的旋转半径等固定数据为基础,根据角度传感器的数据,计算出夹具以及麦克风在移动后的位置、高度以及相对待测物表面的距离,并在显示屏中显示出来。根据麦克风在不同位置接收的待测物发出的声音,得到待测物的声学数据。
15.本发明提供的声学检测的机械手控制系统,使用机械手控制麦克风的位置的设置在本领域中是出乎意料的,相对于现有技术,由于机械手悬挂于测试房间房顶,在保证设备体积较小的情况下,可以更轻易地控制麦克风环绕待测物以各角度检测声学数据而无需移动整个机械手。本发明提供的声学检测的机械手控制系统,在对待测物同一平面或角度变化较小的平面进行多次声学检测时,无需保证每次激光测距器的角度垂直于地面或垂直于待测物表面,后续根据显示屏上的数据手动操作伺服控制器,以控制夹具位置也大大提高了调节的效率以及精准性。
附图说明
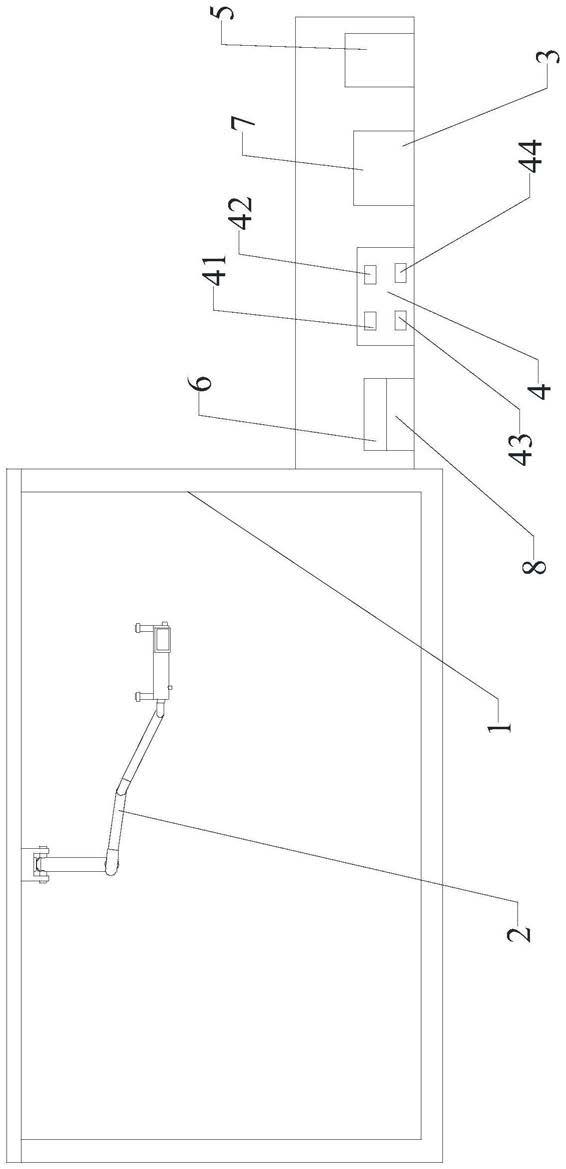
16.图1为本发明具体实施方式的一种声学检测的机械手控制系统的整体结构示意图;
17.图2为本发明具体实施方式的一种声学检测的机械手控制系统的机械手结构示意图;
18.标号说明:1、测试房间;
19.2、机械手;21、转轴;22、连接杆;23、单轴转向关节;24、夹具;241、激光测距器;242、摄像头;
20.3、计算机系统;
21.4、处理器;41、信号采集处理模块;42、提取像素点模块;43、运算模块;44、监测分析模块;
22.5、伺服控制器;
23.6、显示屏;
24.7、plc控制器;
25.8、输入装置。
具体实施方式
26.为详细说明本发明的技术内容、所实现目的及效果,以下结合实施方式并配合附图予以说明。
27.请参照图1以及图2,本发明实施例提供了一种声学检测的机械手控制系统,包括测试房间1、机械手2和计算机系统3;
28.所述机械手2包括转轴21、连接杆22、单轴转向关节23、夹具24和电机;
29.所述连接杆22包括第一杆和第二杆;所述单轴转向关节23包括第一关节、第二关节和第三关节;所述电机包括转轴电机、第一电机、第二电机和第三电机;
30.所述转轴21可以轴旋转地竖直地设置于测试房间1的房顶,所述第一杆的一端通过第一关节连接转轴21,另一端通过第二关节连接第二杆;所述夹具24通过第三关节连接第二杆;
31.所述转轴21与转轴电机连接;所述第一电机、第二电机和第三电机分别连接并驱动第一关节、第二关节和第三关节;
32.所述电机包括输出轴和角度传感器,所述角度传感器设置在输出轴上;
33.所述夹具24上设有两个的激光测距器241,所述激光测距器241包括激光发射头,两个所述激光测距器241的激光发射头的朝向互相垂直;
34.所述计算机系统3包括处理器4、伺服控制器5和显示屏6;所述处理器4包括信号采集处理模块41和运算模块43;所述处理器4、显示屏6、电机、激光测距器241和伺服控制器5电连接。
35.由上描述可知,本发明的有益效果在于:本发明提供的声学检测的机械手控制系统中,首先通过手动操作伺服控制器5,控制转轴21和单轴转向关节23运动,调整夹具24角度,使其中一个激光测距器241垂直朝向地面,另一激光测距器241垂直朝向待测物表面,激光测区器将测得的数据传送于处理器4,所述处理器4同时也接收角度传感器的传输的信息。
36.本发明提供的声学检测的机械手控制系统,处理器4以激光测距器241的数据建立与待测物的相对坐标系,以运算模块43以各连接杆22长度和单轴转向关节23的旋转半径等固定数据为基础根据角度传感器的数据,计算出夹具24以及麦克风在移动后的位置、高度以及相对待测物表面的距离,并在显示屏6中显示出来。本发明提供的声学检测的机械手控制系统,使用机械手2控制麦克风的位置的设置在本领域中是出乎意料的,相对于现有技术,由于机械手2悬挂于测试房间1房顶,在保证设备体积较小的情况下,可以更轻易地控制麦克风环绕待测物以各角度检测声学数据而无需移动整个机械手2。本发明提供的声学检测的机械手控制系统,在对待测物同一平面或角度变化较小的平面进行多次声学检测时,无需保证每次激光测距器241的角度垂直于地面或垂直于待测物表面,后续根据显示屏6上的数据手动操作伺服控制器5,以控制夹具24位置也大大提高了调节的效率以及精准性。
37.进一步地,所述伺服控制器5包括4个控制器本体,所述控制器本体包括驱动电路板和继电器;4个所述控制器本体以驱动电路板分别电连接转轴电机、第一电机、第二电机和第三电机;所述继电器设置在驱动电路板上。
38.由上描述可知,上述设置提供4个继电器,工作人员分别控制继电器上的开关可以做到控制各活动关节(转轴21、单向转向关节)的正转、反转或停止运动,提供了一种简单高效的伺服控制器5。
39.进一步地,所述夹具24上还设有摄像头242,所述摄像头242与其中一个所述激光传感器的朝向平行;
40.所述摄像头242电连接处理器4;
41.所述计算机系统3还包括输入装置8,所述处理器4还包括提取像素点模块42;
42.所述输入装置8电连接处理器4,所述处理器4电连接伺服控制器5。
43.由上描述可知,所述摄像头242和提取像素点模块42用于三维成像,在开始声学检测时,工作人员操作伺服控制器5控制机械手2环绕待测物移动,并以摄像头242朝向待测物,摄像头242将记录下的图像传输给处理器4,处理器4中的提取像素点模块42对处于不同位置拍摄的图像进行特征点和轮廓点提取,所述运算模块43将提取像素点模块42提取的特征点和像素点进行运算,依次获得光线的方向信息和待测物的光场信息,合成三维图像的
数据信息,配合激光测距器241的数据,建立测试房间1的空间坐标系;上述设置的有益效果在于,在待测物较大,形状复杂时,避免了麦克风在多角度对待测物进行测量时,需要多次调整夹具24角度保证激光测距器241朝向垂直地面或待测物表面,而进行多次夹具24位置的测量。处理器4电连接伺服控制器5以操作伺服控制器5,工作人员只需使用输入装置8输入需要的麦克风高度以及到待测物的某个表面(角度)的距离,运算模块43将方向计算出夹具24需要移动到的坐标,从而自动操作伺服控制器5,实现了声学检测的智能化和机械自动化,提高了声学检测的效率。
44.进一步地,所述运算模块43设置有对所述摄像头242拍摄图片的所有特征点和轮廓点进行运算的方程组矩阵运算模块43,对不同照片中同一个特征点和像素点建立函数运算的映射关系运算模块43,通过不同照片的焦距、光圈、景深信息筛选像素点的筛选分组运算模块43,以及对像素点进行替换运算的均值运算模块43、差值运算模块43、转换处理运算模块43;其中对像素点进行替换运算可以通过均值运算模块43、差值运算模块43、转换处理运算模块43中的任意一种或者几种的组合。
45.由上描述可知,上述设置提供了一种简单高效的三维成像的算法。
46.进一步地,所述摄像头242为单目摄像头242。
47.由上描述可知,上述设置提供一种简单高效的用于三维成像的摄像头242。
48.进一步地,所述处理器4还包括plc控制器7,所述plc控制器7电连接处理器4和伺服控制器5。
49.由上描述可知,在待测物形状不规则时,手动控制机械手2运动(夹具24的运动轨迹可能出现误差的概率较大),可能将造成摄像头242记录的图像不符合要求,故设置plc控制器7以规定的程序控制夹具24以规定的运动轨迹运动,提供了三维成像以及声学检测的准确性。
50.进一步地,所述输出轴还设有速度传感器,所述处理器4还包括监测分析模块44。
51.由上描述可知,所述速度传感器用于监测转轴21和单轴转向关节23的线速度以及加速度,并传输信息至监测分析模块44和运算模块43,(值得注意的是,角度传感器和速度传感器可以合成为一个装置),监测分析模块44信息通过摄像头242的速度、加速度、角速度信息判断所述摄像头242是否出现抖动等问题,判断所述摄像头242的运动轨迹是否规则,并将结果通过显示屏6显示。故使所述声学检测的机械手控制系统具有自动的误差监测系统,提高了声学检测的准确性。
52.进一步地,所述显示屏6为触摸操作屏。
53.由上描述可知,上述设置提供了一种简单高效的可作为输入装置8的显示屏6。
54.进一步地,所述夹具24包括夹爪本体、螺栓组件和两个由不锈钢sus301制成的半环状的夹片;所述夹片一端连接在夹爪本体上,两个所述夹片相对设置;
55.所述螺栓组件包括螺栓本体和螺母,所述螺栓一端贯穿两个夹片上部并与螺母连接,所述螺栓组件旋紧后使夹片紧压麦克风于夹爪本体。
56.由上描述可知,上述设置提供了一种简单高效的夹具24,可适配不同尺寸的麦克风,提高了所述声学检测的机械手控制系统的通用性。
57.进一步地,所述电机为电容启动式单相电机。
58.由上描述可知,上述设置提供一种简单高效的可正反转的电机。
59.实施例一
60.本发明提供的声学检测的机械手控制系统的应用场景为:夹持麦克风用以声学检测。
61.请参照图1-2,一种声学检测的机械手控制系统,包括测试房间1、机械手2和计算机系统3;
62.所述机械手2包括转轴21、连接杆22、单轴转向关节23、夹具24和电机;
63.所述连接杆22包括第一杆和第二杆;所述单轴转向关节23包括第一关节、第二关节和第三关节;所述电机包括转轴电机、第一电机、第二电机和第三电机;
64.所述转轴21可以轴旋转地竖直地设置于测试房间1的房顶,所述第一杆的一端通过第一关节连接转轴21,另一端通过第二关节连接第二杆;所述夹具24通过第三关节连接第二杆;
65.所述转轴21与转轴电机连接;所述第一电机、第二电机和第三电机分别连接并驱动第一关节、第二关节和第三关节;
66.所述电机包括输出轴、速度传感器和角度传感器,所述速度传感器和角度传感器设置在输出轴上;
67.所述夹具24包括夹爪本体、螺栓组件和两个由不锈钢sus301制成的半环状的夹片;所述夹片一端连接在夹爪本体上,两个所述夹片相对设置;
68.所述螺栓组件包括螺栓本体和螺母,所述螺栓一端贯穿两个夹片上部并与螺母连接,所述螺栓组件旋紧后使夹片紧压麦克风于夹爪本体。
69.所述夹爪本体上设有摄像头242和两个的激光测距器241,所述激光测距器241包括激光传感器,两个所述激光测距器241的激光传感器的朝向互相垂直;所述摄像头242与其中一个所述激光传感器的朝向平行;
70.所述计算机系统3包括处理器4、伺服控制器5、plc控制器7和显示屏6;所述处理器4包括信号采集处理模块41、提取像素点模块42、监测分析模块44和运算模块43;所述处理器4电连接显示屏6、电机、摄像头242和激光测距器241;所述显示屏6为触摸操作屏;所述伺服控制器5电连接处理器4和plc控制器7。
71.所述伺服控制器5包括4个控制器本体,所述控制器本体包括驱动电路板和继电器;4个所述控制器本体以驱动电路板分别电连接转轴电机、第一电机、第二电机和第三电机;所述继电器设置在驱动电路板上。
72.所述运算模块43设置有对所述摄像头242拍摄图片的所有特征点和轮廓点进行运算的方程组矩阵运算模块43,对不同照片中同一个特征点和像素点建立函数运算的映射关系运算模块43,通过不同照片的焦距、光圈、景深信息筛选像素点的筛选分组运算模块43,以及对像素点进行替换运算的均值运算模块43、差值运算模块43、转换处理运算模块43;其中对像素点进行替换运算可以通过均值运算模块43、差值运算模块43、转换处理运算模块43中的任意一种或者几种的组合。
73.上述的声学检测的机械手控制系统的使用及工作原理:
74.首先,只有待测物和机械手2在测试房间1内,其余设备均在测试房间1外,以减少测试房间1内的噪音干扰。所述机箱手2外表面可使用隔音涂料处理,以减少机械手2发出的噪音的干扰。
75.尽量将待测物放置在测试房间1中的机械手2的正下方,启动plc控制器7;所述plc控制器7将操作电机以规定的方式运行,使夹具24以规定的轨迹环绕待测物运动,其中与摄像头242朝向平行的激光测距器241,至少一次地垂直地朝向待测物的某个平面,记录下距离待测物的信息,摄像头242环绕待测物记录下多张图像;所述角度传感器和速度传感器在上述夹具24的运动过程中也记录下各电机输出轴的角度变量、线速度和线加速度。
76.而后,所述摄像头242、激光测距器241、角度传感器和速度传感器将获得的数据通过电连接的通讯线传输给处理器4,所述处理器4的采集处理模块将处理激光测距器241、角度传感器和速度传感器的数据,所述提取像素点模块42处理摄像头242的信号,具体为对处于不同位置拍摄的图像进行特征点和轮廓点提取,所述运算模块43将提取像素点模块42提取的特征点和像素点进行运算,依次获得光线的方向信息和待测物的光场信息,合成三维图像的数据信息。而后配合两个激光测距器241的数据,建立测试房间1的空间坐标系,得到夹具24(麦克风)的空间坐标,以及待测物外表面各点的空间坐标,并在显示屏6上显示。
77.所述角度传感器和速度传感器的数据在采集处理模块处理后,将电机输出轴的角度变量、线速度和线加速度换算成摄像头242的速度、加速度、角速度信息。监测分析模块44信息通过摄像头242的速度、加速度、角速度信息判断所述摄像头242是否出现抖动等问题,判断所述摄像头242的运动轨迹是否规则,并将结果通过显示屏6显示。若运动轨迹不规则,显示屏6上将提示工作人员,重新进行一次三维成像的拍摄。
78.所述的激光测距器241的数据传输至运算模块43还用于校正提取像素点模块42中的景深数据信息。
79.工作人员可通过输入装置8,输入一个坐标、与一个面的距离或与一个点的距离(可以为待测物的发声点);所述运算模块43可将距离通过连接杆22和转轴21的旋转半径等已知条件计算出转轴21和单轴转向关节23需要转过的角度,从而使处理器4操作伺服控制器5控制电机的输出轴转动。
80.上述的声学检测的机械手控制系统的有益效果在于,利用三维成像技术,建立一个测试房间1的空间坐标系,得到待测物各表面的坐标或发声点的坐标,以电机输出轴的旋转角度通过运算模块43计算出夹具24位移后的坐标,以实现计算机系统3计算出夹具24与待测物的距离以及与地面的高度,实现声学检测的智能化和机械自动化。
81.实施例二
82.本发明提供的声学检测的机械手控制系统的应用场景为:夹持麦克风用以声学检测。
83.一种声学检测的机械手控制系统,包括测试房间1、机械手2和计算机系统3;
84.所述机械手2包括转轴21、连接杆22、单轴转向关节23、夹具24和电机;
85.所述连接杆22包括第一杆和第二杆;所述单轴转向关节23包括第一关节、第二关节和第三关节;电机包括转轴21电机、第一电机、第二电机和第三电机;
86.所述转轴21可以轴旋转地竖直地设置于测试房间1的房顶,所述第一杆的一端通过第一关节连接转轴21,另一端通过第二关节连接第二杆;所述夹具24通过第三关节连接第二杆;
87.所述转轴21与转轴21电机连接;所述第一电机、第二电机和第三电机分别连接并驱动第一关节、第二关节和第三关节;
88.所述电机包括输出轴和角度传感器,所述角度传感器设置在输出轴上;
89.所述夹具24上设有两个的激光测距器241,所述激光测距器241包括激光传感器,两个所述激光测距器241的激光发射头的朝向互相垂直;
90.所述计算机系统3包括处理器4、伺服控制器5和显示屏6;所述处理器4、伺服控制器5、显示屏6、电机和激光测距器241电连接。
91.所述伺服控制器5包括4个控制器本体,所述控制器本体包括驱动电路板和继电器;4个所述控制器本体以驱动电路板分别电连接转轴21电机、第一电机、第二电机和第三电机;所述继电器设置在驱动电路板上。
92.所述显示屏6为触摸操作屏。
93.所述夹具24包括夹爪本体、螺栓组件和两个由不锈钢sus301制成的半环状的夹片;所述夹片一端连接在夹爪本体上,两个所述夹片相对设置;
94.所述螺栓组件包括螺栓本体和螺母,所述螺栓一端贯穿两个夹片上部并与螺母连接,所述螺栓组件旋紧后使夹片紧压麦克风于夹爪本体。
95.以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等同变换,或直接或间接运用在相关的技术领域,均同理包括在本发明的专利保护范围内。