1.本发明涉及巡检机器人领域,特别是一种风电机组舱内吊轨式智能巡检机器人。
背景技术:
2.目前,针对风力发电机的巡检内容,主要包括风机外部、风机中部、风机底部和机舱内的巡检。其中,毫无疑问的是,针对风机外部的巡检,主要由工作人员通过望远镜观察塔筒外观、机场外观、桨叶外观、导流罩外观等等进行肉眼识别。而针对风机中部、风机底部的巡检,则需要人工实际接近观测或借助工具进行检查,或者针对异响进行聆听辨认。针对风电机组舱内的巡检,内容与风机中部类似,目前需要人工进入机舱内进行巡检,但由于机舱位置较高,相较来说,仍不方便巡检且具有一定的危险性。目前,已有厂商尝试在风电机组舱内设置吊轨式智能巡检机器人来代替人工进行舱内巡检,但是,由于风电机组舱内空间相对紧凑,常规的吊轨式巡检机器人大多是沿直线轨道进行巡检的设计,因此在相对紧凑的环境中,如果布设弯曲的轨道,则经常发生行走机构的行走轮打滑等故障。发明人认为,导致这一问题的主要原因是,风电机组舱内巡检,除了需要搭载视频采集设备之外,还需要搭载音频采集设备、烟雾探测传感器或可遥控机械臂等装置,因此单一行走机构负载过重。
技术实现要素:
3.鉴于现有技术存在的上述问题,本发明的一个方面的目的风电机组舱内吊轨式智能巡检机器人,该巡检机器人可通过设置多个在轨的作动机构的方式,分摊负载,可实现在风电机组舱内的紧凑环境的智能巡检。
4.为了实现上述目的,本发明一个方面提供的风电机组舱内吊轨式智能巡检机器人,包括轨道和受驱地沿所述轨道上移动的作动机构,所述作动机构构造为挂载巡检工作用作业单元,且其至少包括第一作动机构和与所述第一作动机构通过柔性连接件连接的第二作动机构,其中,所述第一作动机构包括第一安装座和设置在所述第一安装座上的第一行走轮机构,以及驱动所述第一行走轮机构的第一电机;所述第二作动机构包括第二安装座和设置在所述第二安装座上的第二行走轮机构,以及驱动所述第二行走轮机构的第二电机。
5.作为优选,所述柔性连接件为万向轴连接杆。
6.作为优选,所述柔性连接件设置有多个。
7.作为优选,所述第一行走轮机构包括设置在所述第一安装座上的第一行走轮架,以及设置在所述第一行走轮架上的第一行走轮;所述第二行走轮机构包括设置在所述第二安装座上的第二行走轮架,以及设置在所述第二行走轮架上的第二行走轮。
8.作为优选,所述第一行走轮架与所述第二行走轮架分处于所述轨道的两侧。
9.作为优选,所述轨道为工字钢型轨道,且其至少包括有相互连接的平直段和弯曲段,所述第一行走轮和所述第二行走轮滚动适配于所述轨道的外部顶面上。
10.作为优选,所述第一安装座上还设置有第一负重轮机构,所述第一负重轮机构包括设置于所述第一安装座上的第一负重轮架和设置在所述第一负重轮架上的第一负重轮。
11.作为优选,所述第二安装座上还设置有第二负重轮机构,所述第二负重轮机构包括设置于所述第二安装座上的第二负重轮架和设置在所述第二负重轮架上的第二负重轮。
12.作为优选,所述第一负重轮和所述第二负重轮相对设置有两个且适配于所述轨道两侧相对的滑槽内。
13.作为优选,所述第一负重轮机构的所述第一负重轮架上,还包括有第一副支架;所述第二负重轮机构的所述第二负重轮架上,还设置有第二副支架。
14.本发明提供的风电机组舱内吊轨式智能巡检机器人,可针对风电机组舱内相对紧凑的巡检环境,制定迂回弯曲的巡检轨道,同时,通过多个作动机构分担摄像头、传感器或机械臂等作业单元的负载,以使其在弯曲轨道上也可以灵活行走。
附图说明
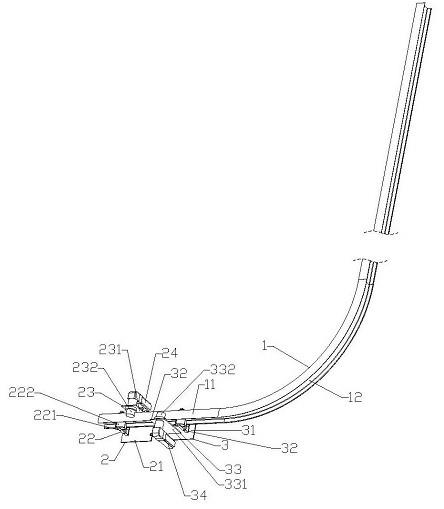
15.图1为本发明的风电机组舱内吊轨式智能巡检机器人的立体结构示意图(未包括作业部)。
16.图2为本发明的风电机组舱内吊轨式智能巡检机器人的另一个立体结构示意图(未包括作业部)。
17.图3为本发明的风电机组舱内吊轨式智能巡检机器人的再一个立体结构示意图(未包括作业部)。
18.图中:1-巡检轨道;2-第一作动机构;3-第二作动机构;4-柔性连接件;11-平直段;12-弯曲段;21-第一安装座;22-第一负重轮机构;23-第一行走轮机构;24-第一电机;31-第二安装座;32-第二负重轮机构;33-第二行走轮机构;34-第二电机;221-第一负重轮架;222-第一负重轮;223-第一副支架;231-第一行走轮架;232-第一行走轮;321-第二负重轮架;322-第二负重轮;323-第二副支架;331-第二行走轮架;332-第二行走轮。
具体实施方式
19.为使本领域技术人员更好的理解本发明的技术方案,下面结合附图和具体实施方式对本发明作详细说明。
20.此处参考附图描述本发明的各种方案以及特征。
21.通过下面参照附图对给定为非限制性实例的实施例的优选形式的描述,本发明的这些和其它特性将会变得显而易见。
22.还应当理解,尽管已经参照一些具体实例对本发明进行了描述,但本领域技术人员能够确定地实现本发明的很多其它等效形式,它们具有如权利要求所述的特征并因此都位于借此所限定的保护范围内。
23.当结合附图时,鉴于以下详细说明,本发明的上述和其他方面、特征和优势将变得更为显而易见。
24.如图1至图3所示,本发明一个实施例提供的风电机组舱内吊轨式智能巡检机器人,包括轨道1和受驱地沿所述轨道1上移动的作动机构,其中,在这一实施例中,由于使用
环境是风电机组舱内巡检,因此,轨道1为工字钢型轨道,实际上包括有平直段11和弯曲段12,在一般传统的巡检机器人的结构中,对于弯曲轨道而言,如负载较重的情况下,在入弯后可能出现行走轮打滑。在本发明这一实施例中,所述作动机构构造为挂载巡检工作用作业单元,例如摄像头等视频采集装置,麦克风等音频采集装置以及便于远程遥控检修的机械手等,这些作业单元如全部加装,则可能产生较大的负载。在这一实施例中,作业机构至少包括第一作动机构2和与所述第一作动机构2通过柔性连接件4连接的第二作动机构3,其中,所述第一作动机构2包括第一安装座21和设置在所述第一安装座21上的第一行走轮机构23,以及驱动所述第一行走轮机构23的第一电机24;所述第二作动机构3包括第二安装座31和设置在所述第二安装座31上的第二行走轮机构33,以及驱动所述第二行走轮机构33的第二电机34。通过设置两个作动机构,可以很好的分摊负载,同时,将两个作动机构通过柔性连接件4连接,可以实现更好的协同工作。具体地,该柔性连接件4可例如为铰链、钢缆等,但优选地,在本发明中,所述柔性连接件4为万向轴连接杆。且,更进一步地,所述柔性连接件4设置有多个。
25.在一些实施例中,如图1所示,所述第一行走轮机构23包括设置在所述第一安装座21上的第一行走轮架231,以及设置在所述第一行走轮架231上的第一行走轮232;所述第二行走轮机构33包括设置在所述第二安装座31上的第二行走轮架331,以及设置在所述第二行走轮架331上的第二行走轮332。同时,为了提升稳定性,作为优选,所述第一行走轮架231与所述第二行走轮架331分处于所述轨道1的两侧。并且所述第一行走轮232和所述第二行走轮332滚动适配于所述轨道1的外部顶面上。
26.另外,考虑到风电机组舱内巡检可能需要挂载的设备较多,因此考虑到负载因素,所述第一安装座21上还设置有第一负重轮机构22,所述第一负重轮机构22包括设置于所述第一安装座21上的第一负重轮架221和设置在所述第一负重轮架221上的第一负重轮222。同样地所述第二安装座31上还设置有第二负重轮机构32,所述第二负重轮机构32包括设置于所述第二安装座31上的第二负重轮架321和设置在所述第二负重轮架321上的第二负重轮322。并且,所述第一负重轮222和所述第二负重轮322相对设置有两个且适配于所述轨道1两侧相对的滑槽内。同时,为了防止第一负重轮架221或第二负重轮架321发生断裂,所述第一负重轮机构22的所述第一负重轮架221上,还包括有第一副支架223;所述第二负重轮机构32的所述第二负重轮架321上,还设置有第二副支架323。
27.以上实施例仅为本发明的示例性实施例,不用于限制本发明,本发明的保护范围由权利要求书限定。本领域技术人员可以在本发明的实质和保护范围内,对本发明做出各种修改或等同替换,这种修改或等同替换也应视为落在本发明的保护范围内。