1.本实用新型涉及一种人偶,特别涉及一种人偶手掌关节结构。
背景技术:
2.当前人偶手掌的手指部份为了模仿人类可弯曲的手指,一般采用较为简单的一根或多根1-2毫米直径的铜线呈麻花状缠绕做为手指骨骼,在外面包覆软胶,达到仿真人手的效果。这种手掌骨骼存在以下弊端:人类手指在使用时仅关节可以弯曲,指骨是直的,现有工艺会使整个手指弯曲,在仿真度方面与真实人类手指有很大的差距;在长期重复调整人偶的手指时,在反复折弯的过程中,由于金属疲劳的原因,手指骨骼以及与手掌支架连接的部位会出现断裂,导致无法继续使用。
技术实现要素:
3.本实用新型的目的在于提供一种人偶手掌关节结构,要解决的技术问题是提高仿真度以及关节的耐磨性。
4.为解决上述问题,本实用新型采用以下技术方案实现:一种人偶手掌关节结构,包括掌心板,所述掌心板上设有分别与手指支架以及前臂支架连接的关节,以使手指支架能够模仿真人手掌掌骨与近节指骨之间的活动以及前臂与掌心之间的活动,所述关节包括一底壳、弹性体、底座、球头以及外壳,底壳为管状结构,其一端为封闭面,另一端为敞口,弹性体设置在底壳的腔体中,底座设置在底壳的腔体中并与弹性体接触,底座上设有与球头相适配的球面凹槽,球头的部分球体设置在球面凹槽中并可在球面凹槽中转动,在球头上设有指骨连接件,外壳为管状结构,其一端具有开口,另一端上设有封堵面,外壳套在底壳上,弹性体将底座顶紧在外壳的封堵面上,以对球头在球面凹槽中转动时,提供相应的摩擦力;封堵面的中心设有供指骨连接件以穿过的第一通孔,在外壳的外壁位于封堵面的一端上至少设有一个第二通孔,第一通孔朝第二通孔方向延伸并与第二通孔连通,形成通槽,球头的部分球体露出外壳,以供指骨连接件在通槽中来回任意转动或在第一通孔中朝任意方向微动。
5.进一步地,所述第一通孔的孔壁为与球头的外壁相适配的弧面。
6.进一步地,所述底座上设有与球面凹槽连通的第一缺口,第一缺口与通槽相对,以实现对指骨连接件避让。
7.进一步地,所述底壳上位于敞口的一端设有第二缺口,第二缺口与底壳的腔体连通,第二缺口与第一缺口相对,以实现对指骨连接件的避让。
8.进一步地,所述底壳的腔体壁上设有沿底壳的轴向设置的导向槽,在底座的外壁上设有与导向槽相适配的导向条。
9.进一步地,所述导向槽设有至少一条,导向条与导向槽数量相同。
10.进一步地,所述球面凹槽的深度小于球头的半径,以使弹性体将底座顶紧在封堵面上时,在底座与封堵面之间设置有间隙。
11.进一步地,所述外壳与底壳之间通过螺丝连接固定。
12.进一步地,所述底壳或外壳上设有连接部,以使底壳或外壳通过连接部固定在掌心板上。
13.进一步地,所述第二通孔设有至少两个,分别对称设置在外壳的外壁上,第一通孔分别朝两个第二通孔方向延伸并与第二通孔连通。
14.本实用新型与现有技术相比,通过在底壳中设置弹性体、底座、球头,通过外壳将弹性体、底座以及球头限制在底壳的腔体中,在外壳上设置通槽,供球头上的指骨连接件转动,从而提高了人偶的仿真度,由于采用球头结构,以最大程度的还原了真人手掌掌骨与近节指骨之间的活动以及前臂与掌心之间的活动,通过设置球头、底座以及弹性体,同时解决了关节在长期使用中由于磨损所产生的松动和断裂问题。
附图说明
15.图1是本实用新型的手掌结构示意图。
16.图2是本实用新型的关节外部结构示意图。
17.图3是本实用新型关节的分解结构示意图。
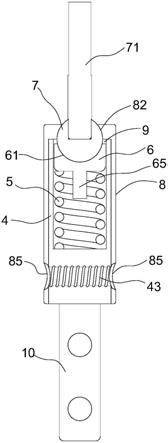
18.图4是本实用新型关节的剖面图。
19.图5是本实用新型底壳的结构示意图。
20.图6是本实用新型连接部第一种设置位置的示意图。
21.图7是本实用新型连接部第二种设置位置的示意图。
22.图8是本实用新型外壳的剖视图。
23.图9是本实用新型连接部为第二种设置位置时底壳的结构示意图。
具体实施方式
24.下面结合附图和实施例对本实用新型作进一步详细说明。
25.如图1所示,本实用新型公开了一种人偶手掌关节结构,包括掌心板1,所述掌心板1上设有分别与手指支架2以及前臂支架连接的关节3,以使手指支架2能够模仿真人手掌掌骨与近节指骨之间的活动以及前臂与掌心之间的活动。
26.如图2、图3和图4所示,所述关节3包括一底壳4、弹性体5、底座6、球头7以及外壳8,其中:
27.底壳4为管状结构,其一端为封闭面,另一端为敞口;弹性体5设置在底壳4的腔体中,底座6设置在底壳4的腔体中并与弹性体5接触;
28.底座6的外径与底壳4的腔体内径相适配,以使底座6能够沿底壳4的轴向直线移动,底座6上设有与球头7相适配的球面凹槽61,球头7的部分球体置于球面凹槽61中并可在球面凹槽61中转动;
29.在球头7上设有指骨连接件71;
30.外壳8为管状结构,其一端具有开口,另一端上设有封堵面81,外壳8的腔体内径与底壳4的外径相适配,外壳8套在底壳4上,弹性体5将底座6顶紧在外壳8的封堵面81上,以对球头7在球面凹槽61中转动时,提供相应的摩擦力;封堵面81的中心设有供指骨连接件71穿过的第一通孔82,在外壳8的外壁位于封堵面81的一端上至少设有一个第二通孔83,第一通
孔82朝第二通孔83方向延伸并与第二通孔83连通,形成通槽84,球头7的部分球体露出外壳8,以供指骨连接件71在通槽84中来回任意转动或在第一通孔82中朝任意方向微动。
31.通过上述结构,实现了模仿真人手掌掌骨与近节指骨之间的活动,而且也便于装配,实现球头结构能够被用于指关节等位置处。
32.当然,在上述结构的基础上,还可以将第二通孔83设置至少两个,两个第二通孔83对称设置,第一通孔82朝两个第二通孔83方向延伸,从而使指骨连接件71能够朝至少两个方向转动,从而进一步模仿前臂与掌心之间的活动,提高人偶手掌的仿真度。
33.如图8所示,第一通孔82的孔壁为与球头7的外壁相适配的球面,以与球头7的贴合更紧密,同时通过弹性体实现球面、球头以及球面凹槽的紧密结合,从而提供足够的摩擦力。
34.在本实用新型中,弹性体5优选为弹簧,在底座6与弹性体5相对的一端上设有一限位柱65,以防止作为弹性体5的弹簧在压缩或复位时与底座6的轴线偏离的问题。
35.如图3所示,底座6上设有与球面凹槽61连通的第一缺口62,第一缺口62与通槽84相对,以实现对指骨连接件71避让,这样当指骨连接件71在通槽84中来回转动时,指骨连接件71能够转动至最大与底壳4的轴线垂直90
゜
的转动角度;当然,为了实现对指骨连接件71的避让以及限位,如图3所示,底壳4上位于敞口的一端设有第二缺口41,第二缺口41与底壳4的腔体连通,第二缺口41与第一缺口62相对,以实现对指骨连接件71的避让,第一缺口62以及第二缺口41的宽度大于指骨连接件71的直径,以保证指骨连接件71转动的顺畅度。
36.当模仿前臂与掌心之间的活动时,第一缺口62、第二缺口41均设有2个,分别与两个第二通孔83相对,从而更进一步地提高人偶手掌的仿真度。
37.如图3和图5所示,底壳4的腔体中设有沿底壳4的轴向设置的导向槽42,在底座6的外壁上设有与导向槽42相适配的导向条63,以防止底座6在底壳4的腔体中轴向转动;具体地,所述导向槽42设有至少一条,导向条63与导向槽42数量相同,导向槽42可对称设置也可任意设置在底壳4的腔体壁上,在此不作具体限定。
38.如图4所示,球面凹槽61的深度小于球头7的半径,以使弹性体5将底座6顶紧在封堵面81上时,在底座6与封堵面81之间设置有间隙9,实现在球头7与球面凹槽61在长期磨损后,始终保证弹性体5通过底座6将球头紧顶在封堵面81上,从而使间隙9作为补位的作用。
39.如图4所示,外壳8与底壳4之间通过螺丝连接固定;具体地,在底壳4位于封闭面的一端上设有直线贯穿底壳4的螺孔43,相应地,在外壳8上相对的两侧上设有孔85,当外壳8套在底壳4上后,孔85与螺孔43正好相对,通过在两侧的孔85上分别通过螺丝与螺孔43螺纹连接,实现了将外壳8与底壳4连接固定。
40.在本实用新型中,关节3的固定存在两种方式,如图6所示,第一种为在底壳4上设有连接部10,以通过螺丝固定在掌心板1上,具体地,连接部10设有两个,设置在底壳4位于封闭面的一端上,两个连接部10之间具有间距并在连接部10上设置有螺孔,在掌心板1上设置有对应的螺孔,将关节3通过连接部10之间的间距插在掌心板1上后,通过螺丝紧固,该方式用于作为食指、中指、无名指以及小拇指的手掌掌骨与近节指骨之间的关节。
41.如图7所示,第二种为连接部10设置在外壳8的外壁上,以通过螺丝固定在掌心板1上,连接部10沿外壳8的轴向设置,此时底壳4上不设置连接部10(图9所示),具体地,连接部10也设置有两个,两个连接部10之间具有间距并在连接部10上设置有螺孔,而掌心板1上设
置有对应的螺孔,连接方式与第一种无异,在此不再赘述,此种方式用于作为大拇指的手掌掌骨与近节指骨之间的关节。
42.当然,连接部10还可以为螺杆,当关节3被作为前臂与掌心之间关节时,连接部10设置在底壳4的封闭面上;但本实用新型不限于此,关节3还可被应用于指关节中。
43.本实用新型具有以下优点:
44.采用球形结构,实现关节的多向转动,极大的提高仿真度。
45.采用弹簧张力支撑球头与球面凹槽的紧密结合,从而提供足够且合适的摩擦阻力,使相应的关节不但可以保持姿势,也可以轻松扭动。
46.设置间隙能够弹克服球头与球面凹槽在长期使用中由于磨损所产生的松动问题。