1.本技术涉及机器人技术领域,具体涉及一种机器人。
背景技术:
2.当前,随着计算机技术的发展,机器人逐渐走进人们的生活中,例如,机器人可以为人们显示一些资讯信息或者图像信息等,为人们的生活和工作提供了诸多便利。
3.通常,机器人可以包括机器人本体和固定在机器人本体上的显示设备,显示设备为人们显示相关信息,如文字信息、图像信息等,而为了满足多数人的需求,显示设备通常会设置在较低的高度。
4.因为显示设备固定在机器人本体上,当人们想要在上述机器人的显示设备上查看信息时,需要先绕到显示设备的正前方向,或者还可能需要低头附身,才能看清显示的信息,获取显示设备所显示信息的便捷性差。
技术实现要素:
5.本技术实施例提供了一种机器人,可以解决相关技术中存在的技术问题,所述机器人的技术方案如下:
6.本技术实施例提供了一种机器人,所述机器人包括机器人本体、显示设备、旋转升降组件和控制器;
7.所述显示设备位于所述机器人本体的顶部;
8.所述旋转升降组件位于所述机器人本体和所述显示设备之间,分别与所述机器人本体、所述显示设备连接,并在所述机器人本体和所述显示设备之间可旋转和/或升降;
9.所述控制器设置于所述机器人本体内部;
10.所述显示设备、所述旋转升降组件分别与所述控制器连接。
11.在一种可能的实现方式中,所述旋转升降组件包括至少一个第一电动伸缩杆和旋转电机;
12.所述第一电动伸缩杆包括第一直线电机、第一活动杆和第一固定筒,所述第一直线电机设置于所述第一固定筒内部,所述第一活动杆的第一端与所述第一直线电机的输出轴连接,所述第一活动杆的第二端与所述显示设备连接,所述第一固定筒位于所述机器人本体内部并与所述旋转电机的输出轴传动连接;
13.所述旋转电机设置于所述机器人本体内部;
14.所述第一直线电机、所述旋转电机分别与所述控制器连接。
15.在一种可能的实现方式中,所述旋转升降组件还包括旋转筒;
16.所述旋转筒位于所述机器人本体内部并与所述旋转电机的输出轴传动连接,所述旋转筒包围所述至少一个第一电动伸缩杆并与每个第一电动伸缩杆的第一固定筒连接。
17.在一种可能的实现方式中,所述机器人还包括轴承,所述轴承的外圈与所述机器人本体连接,所述轴承的内圈与所述旋转筒连接。
18.在一种可能的实现方式中,所述旋转升降组件还包括主动齿轮和从动齿轮;
19.所述主动齿轮与所述旋转电机的输出轴连接,所述从动齿轮与所述旋转筒连接;
20.所述主动齿轮与所述从动齿轮啮合。
21.在一种可能的实现方式中,所述机器人还包括第二电动伸缩杆和人脸信息采集器件;
22.所述第二电动伸缩杆包括第二直线电机、第二活动杆和第二固定筒,所述第二直线电机设置于所述第二固定筒内部,所述第二活动杆的第一端与所述第二直线电机的输出轴连接,所述第二活动杆的第二端与所述人脸信息采集器件连接,所述第二固定筒与所述机器人本体的外壁连接;
23.所述第二直线电机、所述人脸信息采集器件分别与所述控制器连接。
24.在一种可能的实现方式中,所述机器人还包括支撑杆、激光雷达和摄像头;
25.所述支撑杆的第一端与所述机器人本体的外壁连接,所述支撑杆的第二端分别与所述激光雷达、所述摄像头连接;
26.所述激光雷达、所述摄像头分别与所述控制器连接。
27.在一种可能的实现方式中,所述机器人还包括语音交互器件;
28.所述语音交互器件与所述机器人本体连接;
29.所述语音交互器件与所述控制器连接。
30.在一种可能的实现方式中,所述机器人还包括手势检测器件;
31.所述手势检测器件与所述机器人本体连接,并位于所述机器人本体的上部;
32.所述手势检测器件与所述控制器连接。
33.在一种可能的实现方式中,所述机器人还包括移动器件;
34.所述移动器件位于所述机器人本体的底部,并与所述机器人本体连接;
35.所述移动器件与所述控制器连接。
36.在一种可能的实现方式中,所述显示设备是三维全息显示设备。
37.本技术的实施例提供的技术方案至少包括以下有益效果:
38.本技术实施例提供了一种机器人,该机器人包括机器人本体、显示设备、旋转升降组件和控制器,显示设备通过旋转升降组件安装在机器人本体的顶部。当显示设备在为用户显示信息时,可以通过控制器控制旋转升降组件以调节显示设备至合适的高度和角度,使用户可以更加清楚便捷的查看显示设备上显示的信息。
39.应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
附图说明
40.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
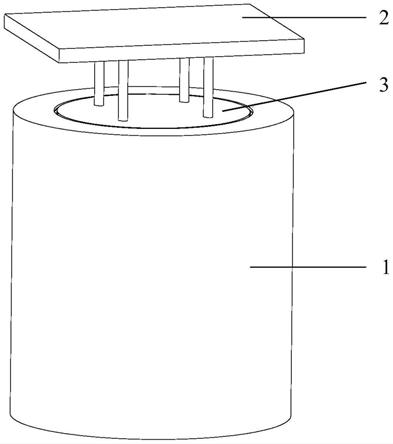
41.图1是本技术实施例示出的一种机器人的结构示意图;
42.图2是本技术实施例示出的一种机器人的剖面示意图;
43.图3是本技术实施例示出的一种第一电动伸缩杆的剖面示意图;
44.图4是本技术实施例示出的一种旋转升降组件的结构示意图;
45.图5是本技术实施例示出的一种机器人的结构示意图;
46.图6是本技术实施例示出的一种第二电动伸缩杆的剖面示意图;
47.图7是本技术实施例示出的一种机器人的结构示意图;
48.图8是本技术实施例示出的一种机器人的结构示意图;
49.图9是本技术实施例示出的一种机器人的结构示意图;
50.图10是本技术实施例示出的一种机器人的结构示意图。
51.图例说明
52.1、机器人本体;
53.2、显示设备;
54.3、旋转升降组件;31、第一电动伸缩杆;32、旋转电机;33、旋转筒;34、主动齿轮;35、从动齿轮;311、第一直线电机;312、第一活动杆;313、第一固定筒;
55.4、控制器;
56.5、轴承;
57.6、第二电动伸缩杆;61、第二直线电机;62、第二活动杆;63、第二固定筒;
58.7、人脸信息采集器件;
59.8、支撑杆;
60.9、激光雷达;
61.10、摄像头;
62.11、语音交互器件;
63.12、手势检测器件;
64.13、移动器件。
具体实施方式
65.为使本技术的目的、技术方案和优点更加清楚,下面将结合附图对本技术实施方式作进一步地详细描述。
66.本实施例提供了一种机器人,如图1和图2所示,机器人包括机器人本体1、显示设备2、旋转升降组件3和控制器4。显示设备2通过旋转升降组件3安装在机器人本体1的顶部。控制器4安装在机器人本体1内部。显示设备2、旋转升降组件3分别与控制器4电性连接。
67.下面对机器人的主要部件分别进行介绍:
68.机器人本体1
69.机器人本体1可以是如图1所示的圆柱形,也可以是其他形状,例如,可以是长方体的形状等等。机器人本体1用于支撑作用,其内部腔体中可以用于容纳各种其他部件。
70.显示设备2
71.显示设备2位于机器人本体1的顶部,可以为用户显示文字信息或者图像信息等,例如,在一个展会中,机器人可以随时为用户展示展品的文字介绍信息等。
72.可选的,显示设备2还可以是三维全息显示设备,三维全息显示设备是利用光场重构原理,通过微米级光学单元结构、纳米级加工精度将几何结构细微分割后,通过多次光纤
折射再聚集在空气中成像。三维全息显示设备可以包括光源发射器和三维全息显示屏,光源发射器位于三维全息显示屏的底部,用于发射光源信号,三维全息显示屏接收到光源信号后对光源信号进行折射,将光源信号投影到空中,从而实现为用户显示三维图像的需求。三维全息显示屏的折射率不同,可以实现不同投影位置的图像显示。
73.旋转升降组件3
74.旋转升降组件3位于机器人本体1和显示设备2之间,分别与两者连接,并在机器人本体1和显示设备2之间可旋转和/或升降。旋转升降组件3与机器人本体1、显示设备2之间的连接可以是固定连接,也可以是可拆卸连接等,本技术实施例对于连接方式不作限定。
75.旋转升降组件3可以实现旋转操作或者升降操作,或者同时实现旋转操作和升降操作,从而带动与旋转升降组件3连接的显示设备相对于机器人本体1进行旋转和/或升降。用户可以通过旋转升降组件3将显示设备2的正向旋转至面向自己的方向,还可以将显示设备2升高或降低来使得显示设备2的高度处在自己最舒适的观看高度处,从而使得用户可以更加清楚便捷的查看显示设备上显示的信息。
76.控制器4
77.控制器4可以设置在机器人本体1的内部腔体中。控制器4可以分别与显示设备2、旋转升降组件3连接,用于控制显示设备2的显示操作、或者控制旋转升降组件3的旋转和升降,例如,控制器4可以分别与显示设备2、旋转升降组件3进行电性连接,从而实现对显示设备2和旋转升降组件3的控制。
78.可选的,机器人本体1上可以设置相应的旋转按钮和升降按钮,或者,机器人还包括遥控器,遥控器上设置了旋转按钮和升降按钮。旋转按钮和升降按钮分别与控制器4电性连接。当用户站在机器人本体1附近想要查看显示设备2上显示的信息时,可以按下旋转按钮,控制器4会控制旋转升降组件3进行旋转,旋转升降组件3带动显示设备2转动,可以将显示设备2的正向旋转至面向自己的方向,从而便于用户查看。用户还可以按下升降按钮,控制器4会控制旋转升降组件3进行升降,旋转升降组件3带动显示设备2升高或者降低,用户可以将显示设备2的高度调节至自己满意的高度。
79.具体的,旋转按钮可以包括顺时针旋转按钮和逆时针旋转按钮,升降按钮可以包括上升按钮和下降按钮,当用户一直按下顺时针旋转按钮时,控制器4会一直控制旋转升降组件3顺时针旋转,从而带动显示设备2顺时针旋转,当用户停止按下按钮时,旋转升降组件3停止旋转。同样的,逆时针旋转按钮、上升按钮和下降按钮的操作方式与顺时针旋转按钮相同,在此不再赘述。
80.可选的,上述按钮的设置需要用户自己手动操作,机器人还可以设置可以自动控制旋转升降组件3的器件,例如,机器人可以包括人体检测器件,该人体检测器件可以设置在机器人本体1上,用于检测是否有用户距离机器人本体1在预设距离以内、并面向机器人本体1,当存在时,可以检测该用户的当前高度,并控制旋转升降组件3旋转,将显示设备2的正向旋转至用户的方向,并控制旋转升降组件3升降,至显示设备2的高度到达低于用户高度一定距离的位置,使得用户可以方便快捷的查看显示设备2显示的信息。
81.下面对旋转升降组件3的结构进行详细说明:
82.旋转升降组件3包括至少一个第一电动伸缩杆31和旋转电机32,第一电动伸缩杆31、旋转电机32分别与控制器4连接。这样,控制器4可以通过控制第一电动伸缩杆31伸缩来
实现显示设备2的升降操作,通过控制旋转电机32的输出轴的转动来实现显示设备2的旋转操作。
83.第一电动伸缩杆31的结构设置可以如图3所示,对应如下:
84.第一电动伸缩杆31包括第一直线电机311、第一活动杆312和第一固定筒313,第一直线电机311设置于第一固定筒313内部,第一活动杆312的第一端与第一直线电机311的输出轴连接,第一活动杆312的第二端位于第二固定筒313外部。
85.第一电动伸缩杆31和旋转电机32的连接方式可以如图2中所示,第一活动杆312的第二端与显示设备2连接,第一固定筒313位于机器人本体1内部并与旋转电机32的输出轴传动连接,旋转电机32固定在机器人本体1内部,第一直线电机311、旋转电机32分别与控制器4连接。
86.在实施中,可以将旋转电机32固定连接在机器人本体1内腔的底面上或者侧壁上,或者通过螺钉或者锁件等部件与机器人本体1实现可拆卸连接。将第一固定筒313竖直设置在机器人本体1的内部,并与旋转电机32的输出轴传动连接。将第一活动杆312的第二端与显示设备2连接,第一活动杆312的第二端与显示设备2之间可以是固定连接,或者可拆卸连接等。可选的,显示设备2可以相对于地面水平设置在第一活动杆312的第二端,也可以相对于地面倾斜一定角度设置在第一活动杆312的第二端。
87.这样,控制器4可以通过控制第一直线电机311控制第一活动杆312的伸缩,从而带动显示设备2实现升降;还可以通过控制旋转电机32的输出轴转动带动第一固定筒313一起转动,第一固定筒313则会带动第一活动杆312转动,第一活动杆312带动显示设备2转动,从而实现显示设备2的旋转。
88.可选的,如图2和图4所示,为了显示设备2的稳定,可以在机器人中设置多个第一电动伸缩杆31,显示设备2可以水平安装在多个第一电动伸缩杆31上,也可以倾斜一定角度安装在多个第一电动伸缩杆31上。多个第一电动伸缩杆31一起伸缩同样的距离,即可以实现显示设备2的升降。
89.多个第一电动伸缩杆31可以设置在一个支撑部件上,即可以设置一个旋转筒33,旋转筒33包围这多个第一电动伸缩杆31并与每个第一电动伸缩杆31的第一固定筒313连接。可以如图4所示,将第一电动伸缩杆31的第一固定筒313设置于旋转筒33内,例如,可以固定在旋转筒33的内部底面上。旋转筒33的顶板上对应于第一活动杆312的位置处还设置有多个导向孔,第一活动杆312的第二端穿过对应的导向孔再与显示设备2连接。
90.旋转筒33位于机器人本体1内部并与旋转电机32的输出轴传动连接。旋转电机32的输出轴转动可以通过旋转筒33带动多个第一电动伸缩杆32转动,从而带动显示设备2转动,实现显示设备2的旋转。
91.为了在实现旋转筒313可相对于机器人本体1旋转的同时,还不影响第一活动杆312的相对于机器人本体1的伸缩,可以在机器人本体1和旋转筒33之间设置一轴承5,将轴承5的外圈与机器人本体1连接,将轴承5的内圈与旋转筒33连接。当旋转电机32的输出轴转动时可以带动旋转筒33相对于机器人本体1转动,旋转筒33带动第一电动伸缩杆31转动,从而实现显示设备2相对于机器人本体1的转动。
92.可选的,对于旋转电机32的输出轴与旋转筒33之间的传动连接结构,也可以有多种设置,例如,可以是带传动或齿轮传动等等,在本技术实施例中,以齿轮传动为例进行详
细描述。旋转升降组件3还包括主动齿轮34和从动齿轮35。主动齿轮34与旋转电机32的输出轴连接,从动齿轮35与旋转筒33连接,主动齿轮34与从动齿轮35啮合。这样,旋转电机32的输出轴转动可以带动主动齿轮34转动,主动齿轮34带动从动齿轮35转动,从动齿轮35带动旋转筒33转动。
93.在本技术实施例中,机器人还可以实现其他功能,下面对可实现的几种功能进行详细说明:
94.人脸识别功能
95.机器人可以具有人脸识别功能,相应的结构如图5所示,机器人还可以包括第二电动伸缩杆6和人脸信息采集器件7,人脸信息采集器件7通过第二电动伸缩杆6安装在机器人本体1上,人脸信息采集器件7、第二电动伸缩杆6分别与控制器4连接,例如,可以是电性连接。
96.在实施中,可以将第二电动伸缩杆6的固定端安装在机器人本体1上,将第二电动伸缩杆6的伸缩端与人脸信息采集器件7连接,人脸信息采集器件7可以固定连接在第二电动伸缩杆6的伸缩端,也可以与伸缩端可拆卸连接。当有用户站在机器人附近时,控制器4可以控制第二电动伸缩杆6的伸缩端进行伸缩,在第二电动伸缩杆6伸缩的过程中,人脸信息采集器件7一直检测用户的人脸信息,直到检测到人脸信息采集器件7与用户的人脸正对时,控制器4控制第二电动伸缩杆6停止伸缩,人脸信息采集器件7准确的采集用户的人脸信息。
97.人脸信息采集器件7将采集到的用户的人脸信息发送至控制器4,控制器4将其与预先存储的多个人脸信息进行比较。当确定出该用户的人脸信息与预先存储的一个人脸信息相同时,可以确定出该用户是访客、工作人员还是预约人员等。若是访客,可以为其进行简单介绍,若是工作人员,则可以为其记录打卡,若是预约人员,则可以为该其显示对应的信息或者播放对应的引导音频等等。
98.可选的,对于第二电动伸缩杆6的结构设置可以如图6所示,相应的结构可以是:第二电动伸缩杆6包括第二直线电机61、第二活动杆62和第二固定筒63,第二直线电机61设置于第二固定筒63内部,第二活动杆62的第一端与第二直线电机61的输出轴连接,第二活动杆62的第二端与人脸信息采集器件7连接,第二固定筒63与机器人本体1的外壁连接。并且,第二直线电机61与控制器4连接。
99.在实施中,控制器4可以通过控制第二直线电机61,控制第二电动伸缩杆6升降,从而带动人脸信息检测器件7升降。
100.可选的,人脸信息采集器件7可以是深度相机,用于采集三维点云数据从而实现人脸识别。人脸信息采集器件7还可以是普通相机,采集了用户的二维人脸数据后,将其输入到机器学习模型中,对其进行识别和判定。人脸信息采集器件7还可以是其他合理性的器件,本技术实施例对此不作限定。
101.用户感兴趣物体识别功能
102.机器人可以检测用户注视的方向,确定出用户感兴趣的物体,并为其进行对应的讲解或者信息展示,相应的结构可以如图7所示,机器人还可以包括支撑杆8、激光雷达9和摄像头10。支撑杆8的第一端与机器人本体1的外壁连接,支撑杆8的第二端分别与激光雷达9、摄像头10连接。激光雷达9、摄像头10分别与控制器4连接,例如,可以是电性连接。
103.其中,将激光雷达9和摄像头10设置在机器人本体1上,并通过支撑杆8设置在具有一定高度的位置处,例如,可以设置在1.3m的位置处,既可以便于激光雷达9对周围的物体进行检测,也便于摄像头对于不同高度的用户的瞳孔的采集,当然,也可以将激光雷达9和摄像头10通过支撑杆8设置在其他合理性的高度位置处,本技术实施例对此不作限定。或者,可以将支撑杆8替换为第三电动伸缩杆,第三电动伸缩杆与控制器4连接,例如,可以是电性连接。控制器4可以控制第三电动伸缩杆伸缩,从而带动激光雷达9和摄像头10升降,以使激光雷达9和摄像头10位于适合的高度位置处。
104.在实施中,可以将室内的物体的形状和尺寸预先存储在数据库中。激光雷达9可以用于检测这些预先存储的物体的当前位置并将其发送给控制器4。摄像头10可以用于采集用户的面部信息并将其发送给控制器4。控制器4通过接收到的用户的面部信息确定出用户的瞳孔注视的方向或范围。当控制器4检测到用户的瞳孔注视一个方向或范围的时间达到预设时长时,可以用户的瞳孔注视方向或范围、以及各个物体的当前位置,确定出用户瞳孔注视的物体,并控制显示设备2为用户进行该物体对应的相关信息的显示、控制音频设备为用户播放该物体的有关讲解音频等。
105.可选的,可以在机器人本体1上环绕设置多个激光雷达9,每个激光雷达9用户检测一定范围内的空间中的物体,也可以在机器人本体1的较高的位置设置一个可以360
°
环形检测的激光雷达9,本技术实施例对此不作限定。
106.语音交互功能
107.机器人可以具有语音交互的功能,相应的结构如图8所示,机器人还可以包括语音交互器件11。语音交互器件11与机器人本体1连接,语音交互器件11与控制器4连接,例如,可以是电性连接。
108.在实施中,语音交互器件11可以包括麦克风和扬声器等,设置于机器人本体1上,用于接收用户发出的声音信息并将其发送至控制器4,控制器4可以识别用户发出的声音信息,并从预设数据库匹配相应的回复信息,其中,预设数据库中可以存储一些与机器人所处场景相关的一些回复信息,确定出声音信息对应的回复信息后将回复信息发送至语音交互器件11,语音交互器件11播放回复信息,从而实现机器人与用户之间的语音交互。
109.手势交互功能
110.机器人可以具有手势交互的功能,相应的结构如图9所示,机器人还可以包括手势检测器件12。手势检测器件12与机器人本体1连接,并位于机器人本体1的上部,手势检测器件12与控制器4连接,例如,可以是电性连接。
111.在实施中,手势检测器件12可以用户检测用户的手势信息,并根据用户的手势信息确定出对应的操作,从而实现用户与机器人之间的手势的交互。例如,当手势检测器件12检测到用户的手势为手心向上、由下至上的手势时,控制器4可以控制旋转升降组件3上升,从而实现显示设备2上升,当检测用户的手势为手心向下、由上至下的手势时,控制器4可以控制旋转升降组件4下降,从而实现显示设备2的下降,等等。
112.可选的,手势检测器件12可以是深度传感器,采集用户的手部分的三维点云数据,用于识别用户的手势变化。手势检测器件12还可以是多个电容的排列组合,用于检测手势的变化。当然,也可以是其他合理性的器件,本技术实施例对此不作限定。
113.移动功能
114.机器人可以具有移动的功能,相应的结构如图10所示,机器人还包括移动器件13。移动器件13位于机器人本体1的底部,并与机器人本体1连接。移动器件13与控制器4连接,例如,可以是电性连接。这样,控制器4可以控制移动器件13移动,从而带动机器人移动。
115.可以理解的是,在本技术实施例中,可以对上述的人脸识别功能、用户感兴趣物体识别功能、语音交互功能、手势交互功能和移动功能进行任意的组合,得到可以实现不用组合功能的机器人。
116.本技术的实施例提供的技术方案至少包括以下有益效果:
117.本技术实施例提供了一种机器人,该机器人包括机器人本体1、显示设备2、旋转升降组件3和控制器4,显示设备2通过旋转升降组件3安装在机器人本体1的顶部。当显示设备2在为用户显示信息时,可以通过控制器4控制旋转升降组件3以调节显示设备2至合适的高度和角度,使用户可以更加清楚便捷的查看显示设备2上显示的信息。
118.以上所述仅为本技术的可选实施例,并不用以限制本技术,凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。