1.本发明涉及一种反恐防爆机器人,特别是公开一种盾牌机器人系统。
背景技术:
2.盾牌机器人通过融合机器人技术、自动化技术、信息处理与通信技术等多学科知识研发而成,能够代替或辅助人,完成反恐、突袭、抢救、演练等任务。
3.为了提高盾牌机器人的机动性、可通过性、隐蔽性、防护全面性,需要布置在机器人上的盾牌,在不同情况下可以快速、自动地完成展开、收拢、转向等姿态调整。现有技术中机器人使用的盾牌为固定式结构,如:专利申请号为202020221404.4的实用新型专利公开了一种安装盾牌的破障机器人,其主要包括车体,车体后侧设有后安装底座,后安装底座上插设后盾牌,车体左右两侧分别设有侧安装底座,侧安装底座上插设侧盾牌。这种结构,需要通过外部人员对盾牌进行安装与拆卸,实现立盾和收拢,在危险环境中,人员拆装盾牌的过程,可能为其带来安全问题,且费时费力。
技术实现要素:
4.本发明的目的在于克服现有技术中存在的缺陷,提供一种盾牌运动自由度大、收拢体积小、盾牌运动速度快、提高机器人动作效率的盾牌机器人系统。
5.本发明是这样实现的:一种盾牌机器人系统,包括机器人底盘、盾牌机构和控制单元,所述盾牌机构与所述机器人底盘相连,所述控制单元包括控制器、无线通信单元和信号收发单元,所述控制器与所述无线通信单元相连,所述信号收发单元固定在所述机器人底盘上并与所述无线通信单元无线相连,所述控制器通过所述无线通讯单元和信号收发单元控制所述机器人底盘和盾牌机构动作,所述盾牌机构包括上盾牌、下盾牌、盾牌固定架、旋转固定架、盾牌平转机构、盾牌翻转机构和盾牌旋转机构;所述盾牌平转机构固定在所述盾牌固定架的一端,所述下盾牌固定在所述盾牌固定架上,所述上盾牌的一端与所述盾牌平转机构相连,所述上盾牌所在平面与所述下盾牌所在平面相互平行,所述上盾牌通过所述盾牌平转机构在上盾牌所在平面内旋转;所述盾牌固定架的一侧与所述旋转固定架的一侧铰接,所述盾牌翻转机构的一端与所述盾牌固定架相连,所述盾牌翻转机构的另一端与所述旋转固定架相连;所述旋转固定架通过所述盾牌旋转机构与所述机器人底盘相连,所述旋转固定架通过所述盾牌旋转机构在所述机器人地盘上旋转。
6.所述盾牌平转机构包括上盾牌缓冲架、平转回转支承、平转驱动轴、平转减速电机;所述上盾牌缓冲架固定在所述上盾牌上,所述平转驱动轴的一端与所述平转减速电机相连,所述平转驱动轴的另一端与所述平转回转支承相连,所述平转回转支承与所述上盾牌缓冲架相连,所述平转减速电机固定在所述盾牌固定架上。
7.所述平转减速电机为涡轮蜗杆式减速电机。
8.所述盾牌翻转机构为电动推杆,所述电动推杆的一端与所述盾牌固定架铰接相连,所述电动推杆的另一端与所述旋转固定架铰接相连。
9.所述盾牌旋转机构包括旋转减速电机、驱动齿轮和旋转回转支承,所述旋转减速电机的输出端通过所述驱动齿轮与所述旋转回转支承的外圈相啮合;所述旋转减速电机与所述旋转固定架相连,所述旋转回转支承连于所述旋转固定架和所述机器人底盘之间。
10.所述机器人底盘前端设有前摄像头、第一距离传感器、照明灯,所述机器人底盘的后端设有后端红外摄像头、第二距离传感器。
11.所述机器人底盘内设有电池供电组件,所述机器人底盘的后端设有与所述电池供电组件相连的充电接口、电源开关。
12.本发明的有益效果是:通过所述盾牌平转机构、盾牌翻转机构和盾牌旋转机构,实现上盾牌和下盾牌的运动自由度扩大,展开、收拢、转动速度快,实现平转、翻转、旋转3个独立动作,可同时进行,提高机器人动作效率;可以将上盾牌和下盾牌收拢至尽量小的体积,从而提高机器人的整体可通过性;通过机器人底盘上的前后摄像头、前后距离传感器、照明灯、充电接口等,满足远程控制要求。
附图说明
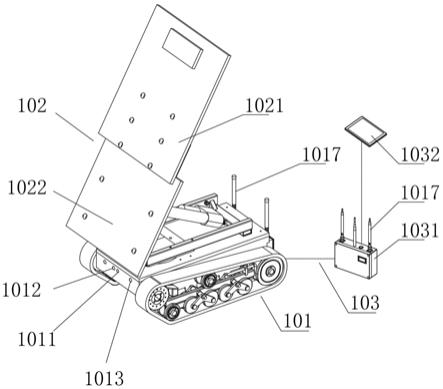
13.图1是本发明前侧结构示意图。
14.图2 是本发明后侧结构示意图图3 是本发明盾牌收拢时的结构示意图。
15.图4是本发明盾牌展开时的结构示意图。
16.图5是本发明盾牌平转机构和盾牌翻转机构的内部结构示意图。
17.图6是图5的a部局部放大图。
18.其中:101、机器人底盘;102、盾牌机构;103、控制单元;1011、前摄像头;1012、第一距离传感器;1013、照明灯;1014、后端红外摄像头;1015、充电接口;1016、电源开关;1017、天线;1018、第二距离传感器;1021、上盾牌;1022、下盾牌;1023、盾牌平转机构;10231、上盾牌缓冲架;10232、平转回转支承;10233、平转驱动轴;10234、平转减速电机;1024、盾牌翻转机构;10241、第一翻转铰接轴;10242、第二翻转铰接轴;10243、第三翻转铰接轴;1025、盾牌旋转机构;10251、旋转减速电机;10252、驱动齿轮;10253、旋转回转支承;1026、盾牌固定架;1027、旋转固定架;1031、无线通信单元;1032、控制器;1033、信号收发单元。
具体实施方式
19.根据附图1-6,本发明包括机器人底盘101、盾牌机构102和控制单元103,所述盾牌机构102与所述机器人底盘101相连,所述控制单元103包括控制器1032、无线通信单元1031和信号收发单元1033。所述控制器1032与所述无线通信单元1031相连,所述信号收发单元1033固定在所述机器人底盘101上并与所述无线通信单元1031通过天线1017无线相连,所
述无线通信单元1031将来自所述控制器1032的控制信号转换成通讯信号发送至所述信号收发单元1033,信号收发单元1033将来自所述无线通信单元1031的通讯信号还原成控制信号控制所述机器人底盘101和盾牌机构102动作。
20.盾牌机构102包括上盾牌1021、下盾牌1022、盾牌固定架1026、旋转固定架1027、盾牌平转机构1023、盾牌翻转机构1024、和盾牌旋转机构1025。所述盾牌平转机构1023固定在所述盾牌固定架1026的一端,所述下盾牌1022固定在所述盾牌固定架1026上,所述上盾牌1021的一端与所述盾牌平转机构1023相连,所述上盾牌1021所在平面与所述下盾牌1022所在平面相互平行。所述上盾牌1021可沿所述盾牌平转机构1023在上盾牌1021的平面内旋转。
21.所述盾牌平转机构1023为电动驱动机构,所述盾牌平转机构1023包括上盾牌缓冲架10231、平转回转支承10232、平转驱动轴10233、平转减速电机10234。所述上盾牌缓冲架10231固定在所述上盾牌1021上,所述平转驱动轴10233的一端与所述平转减速电机10234相连,所述平转驱动轴10233的另一端与所述平转回转支承10232相连,所述平转回转支承10232与所述上盾牌缓冲架10231相连,所述平转减速电机10234固定在所述盾牌固定架1026上。所述平转减速电机10234驱动所述平转驱动轴10233旋转,通过平转驱动轴10233带动上盾牌1021旋转,从而与下盾牌1022间实现相互展开和重叠收拢2种姿态。其中,所述平转减速电机10234优选为涡轮蜗杆式减速电机,可实现机械自锁。
22.所述盾牌翻转机构1024为电动推杆。所述盾牌固定架1026的一侧与所述旋转固定架1027的一侧通过第二翻转铰接轴10242铰接。所述盾牌翻转机构1024的一端与所述盾牌固定架1026通过第一翻转铰接轴10241铰接相连,所述盾牌翻转机构1024的另一端与所述旋转固定架1027通过第三翻转铰接轴10243铰接相连。所述盾牌翻转机构1024使所述盾牌固定架1026向所述旋转固定架1027折叠或展开。
23.所述盾牌翻转机构1024两端分别连接盾牌固定架1026和旋转固定架1027。通过第一翻转铰接轴10241、第二翻转铰接轴10242、第三翻转铰接轴10243这3个翻转铰接轴,使盾牌固定架1026、旋转固定架1027和盾牌翻转机构1024,两两相连呈三角结构,从而通过盾牌翻转机构1024电动推杆的伸缩,实现盾牌固定架1026与旋转固定架1027之间的角度调节。其中的所述电动推杆为内含螺杆结构,可实现机械自锁。
24.所述旋转固定架1027通过所述盾牌旋转机构1025与所述机器人底盘101相连,所述旋转固定架1027通过所述盾牌旋转机构1025在所述机器人底盘101上旋转。
25.所述盾牌旋转机构1025为电动旋转机构。所述盾牌旋转机构1025包括旋转减速电机10251、驱动齿轮10252和旋转回转支承10253,所述旋转减速电机10251的输出端通过所述驱动齿轮10252与所述旋转回转支承10253的外圈相啮合;所述旋转减速电机10251与所述旋转固定架1027相连,所述旋转回转支承10253连于所述旋转固定架1027和所述机器人底盘101之间。
26.所述盾牌旋转机构1025分别连接所述旋转固定架1027与机器人底盘101,实现旋转固定架1027与机器人底盘101之间的水平角度调节。其中所述旋转减速电机10251优选为涡轮蜗杆式减速电机,可实现机械自锁,提高机构安全性。
27.所述盾牌机构102动作时,所述盾牌平转机构1023可使上盾牌1021在盾牌平面上旋转,从而实现上盾牌1021和下盾牌1022之间的重叠收拢和展开。
28.所述盾牌翻转机构1024通过推拉、伸缩使所述盾牌固定架1026,盾牌固定架1026沿着与所述旋转固定架1027的铰接处翻转,从而使得盾牌固定架1026带动下盾牌1022上和盾牌1021上下翻转,实现水平折叠或竖向立起。
29.所述盾牌旋转机构1025带动旋转固定架1027旋转,从而使得盾牌机构102沿盾牌旋转机构1025的垂直轴旋转。
30.所述机器人底盘101前端设有分别与所述信号收发单元1033相连的前摄像头1011、第一距离传感器1012、照明灯1013,所述机器人底盘101的后端设有分别与所述信号收发单元1033相连的后端红外摄像头1014、第二距离传感器1018。所述机器人底盘101内设有为本发明系统供电的电池供电组件,所述机器人底盘101的后端设有与所述电池供电组件相连的充电接口1015、电源开关1016。