1.本实用新型涉及机器人领域,特别涉及一种音乐演奏机器人。
背景技术:
2.现有的音乐演奏机器人通常只能在计算机的控制下,按照乐谱对乐器的发声部位进行有规律的敲击,进而实现音乐的演奏。虽然这种演奏机器人能够通过敲击乐器发声,但并不能像人一样富有感情的用具有弹性和灵活性的手指来敲击键盘或拨弄琴弦,因此现有的音乐演奏机器人演奏出的音乐呆板、生硬、缺乏美感。
3.此外,现有的音乐演奏机器人只能单独的演奏某一首乐曲,不能实现多个机器人、多台乐器的合奏,即使某些实验室能够在计算机的控制下,实现机器人的合奏,整个机器人系统也十分复杂,占用空间巨大,并不实用。
4.因此,用户需要一种观赏性高且能够贴近或超出人类用手指演奏出的效果的音乐演奏机器人,并能在占用空间较小的前提下实现多台机器人、多台乐器的合奏。
技术实现要素:
5.鉴于现有技术中的上述缺陷或不足,本实用新型提供了一种音乐演奏机器人,以解决上述技术问题。
6.本技术提供了一种音乐演奏机器人,包括:控制部和竖直方向上彼此相互连接的多组敲槌驱动部,其中,每组敲槌驱动部包括:第一舵机单元、舵盘、第二舵机单元、摇臂和敲槌单元;所述第一舵机单元的舵机输出轴与所述舵盘驱动连接,所述舵盘与所述第二舵机单元固定连接;所述第二舵机单元的舵机输出轴与摇臂的第一端驱动连接,所述摇臂的第二端与所述敲槌单元连接;所述控制部与所述第一舵机单元和所述第二舵机单元控制连接,演奏时,所述敲槌单元在竖直方向上敲击乐器的对应发声部。
7.进一步的,所述敲槌单元包括第一拉杆部和第二拉杆部,所述第一拉杆部与所述摇臂的第二端连接,所述第一拉杆部和所述第二拉杆部铰接,演奏状态时所述第二拉杆部垂直于地面。
8.进一步的,所述敲槌单元包括第一拉杆部、铰接部和第二拉杆部,所述第一拉杆部与所述摇臂的第二端连接,所述第一拉杆部还连接至所述铰接部,所述铰接部连接至所述第二拉杆部,演奏状态时所述第二拉杆部垂直于地面。
9.进一步的,所述敲槌单元还包括槌子,所述槌子可更换的设置于所述第二拉杆部末端。
10.进一步的,所述摇臂的第二端连接有用于调节第一拉杆伸展长度的拉杆调节器。
11.进一步的,所述拉杆调节器固定在所述摇臂的第二端,所述拉杆调节器上设置有供所述第一拉杆部穿过的通孔,在与通孔延伸的方向垂直的方向上还设置有紧固件。
12.进一步的,位于最顶部的敲槌驱动部设置有悬挂装置。
13.进一步的,演奏状态时,每组敲槌驱动部的第二拉杆部和槌子分别对应乐器的不
同发声部。
14.进一步的,当所述第一拉杆部固定在所述摇臂的第二端时,所述第一拉杆部平行于所述摇臂长度方向的轴线。
15.进一步的,每组敲槌驱动部的第一拉杆部彼此位于不同的平面上。
16.本发明提供的一种音乐演奏机器人,其仿照昆虫多肢骨结构设计敲槌单元,能够演奏出人体不容易达到的演奏效果。同时,通过悬挂和支架设计,在占用空间较小的前提下,实现了多个机器人、多台乐器的合奏。
附图说明
17.通过阅读参照以下附图所作的对非限制性实施例所作的详细描述,本技术的其它特征、目的和优点将会变得更明显:
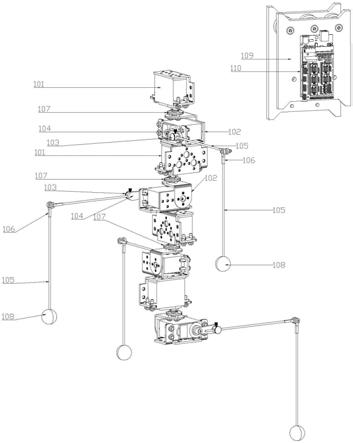
18.图1为本技术一个实施例提供的音乐演奏机器人的第一视角结构示意图;
19.图2为本技术一个实施例提供的音乐演奏机器人的第二视角结构示意图;
20.图3为本技术一个实施例提供的音乐演奏机器人的敲槌驱动部的结构示意图;
21.图4为本技术一个实施例提供的合奏状态的音乐演奏机器人的结构示意图。
具体实施方式
22.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
23.在本实用新型实施例中使用的术语是仅仅出于描述特定实施例的目的,而非旨在限制本实用新型。在本实用新型实施例和所附权利要求书中所使用的单数形式的“一种”、“所述”和“该”也旨在包括多数形式,除非上下文清楚地表示其他含义。
24.应当理解,尽管在本实用新型实施例中可能采用术语第一、第二、第三等来描述获取模块,但这些获取模块不应限于这些术语。这些术语仅用来将获取模块彼此区分开。
25.取决于语境,如在此所使用的词语“如果”可以被解释成为“在
……
时”或“当
……
时”或“响应于确定”或“响应于检测”。类似地,取决于语境,短语“如果确定”或“如果检测(陈述的条件或事件)”可以被解释成为“当确定时”或“响应于确定”或“当检测(陈述的条件或事件)时”或“响应于检测(陈述的条件或事件)”。
26.需要注意的是,本实用新型实施例所描述的“上”、“下”、“左”、“右”等方位词是以附图所示的角度来进行描述的,不应理解为对本实用新型实施例的限定。此外在上下文中,还需要理解的是,当提到一个元件被形成在另一个元件“上”或“下”时,其不仅能够直接形成在另一个元件“上”或者“下”,也可以通过中间元件间接形成在另一元件“上”或者“下”。
27.本实施例提供了一种音乐演奏机器人的具体结构。参见图1-2,音乐演奏机器人,包括控制部和机器人本体。其中,控制部与机器人本体可以分离设置,也可以一体设置,本实施例并不做过多的限定。当控制部与机器人本体分离设置时,控制部包括控制器固定板109和控制器本体110。
28.进一步的,机器人本体采用悬挂结构,由竖直或垂直于地面方向上彼此相互连接的多组敲槌驱动部构成。参见图3,每组敲槌驱动部包括第一舵机单元101、舵盘107、第二舵机单元102、摇臂104和敲槌单元105,其中,第一舵机单元101和第二舵机单元102包括舵机本体和支架。
29.进一步的,第一舵机单元101的舵机输出轴与舵盘107驱动连接,舵盘107与第二舵机单元102固定连接,第二舵机单元102的舵机输出轴与摇臂104的第一端驱动连接,摇臂104的第二端与敲槌单元105连接。
30.所述控制器与第一舵机单元101和第二舵机单元102控制连接,演奏时,敲槌单元105在竖直方向上敲击乐器的对应发声部。当第一舵机单元101在控制器的控制下驱动舵盘107转动时,舵盘107会带动第二舵机单元102及以下的部分转动,从而实现每一敲槌单元105的位置调节,以便于敲槌单元105对准乐器的不同发声部。
31.更优选的,敲槌单元105包括第一拉杆部和第二拉杆部,所述第一拉杆部与摇臂104的第二端连接,并且当所述第一拉杆部固定在摇臂104的第二端时,所述第一拉杆部平行于摇臂104长度方向的轴线。所述第二拉杆部的末端设置有槌子108,优选为槌该槌子108可与第二拉杆部一体成型,但更优选的是,将槌子108可替换、可拆卸的设置于第二拉杆部末端。所述第一拉杆部和所述第二拉杆部相互铰接,演奏状态时,所述第二拉杆部自然下垂,从而垂直于地面。上述相互铰接的第一拉杆部和所述第二拉杆部彼此之间可以做360度的转动,比人类手指的关节部更加灵活。在演奏时,控制器控制第二舵机单元102的输出轴转动,进而带动摇臂104转动,摇臂104挥舞着第一拉杆部上下摆动,此时自然下垂的第二拉杆部会在竖直/垂直于地面的方向上下运动,当第二拉杆部的末端槌子108触及到乐器的发声部时(例如琴弦或琴键),第一拉杆部和第二拉杆部的铰接部会发生相对转动,这种转动使得槌子敲击乐器发声部时更贴近于人的手指敲击乐器时的效果,进而使得敲击声更缓和、更有柔性、更加变化多端,演奏效果能够达到或者超出人类通过手指直接演奏的效果。
32.更进一步的,所述槌子108和第二拉杆部为可拆卸结构,用户可以根据演奏需要,调整更换不同大小、质地的槌子108,进而演奏出更加美妙动听的效果。
33.更进一步的,为了便于安装、拆卸和维修,可以将敲槌单元105设置为模块化的可拆装结构。敲槌单元105包括第一拉杆部、铰接部106和第二拉杆部,所述第一拉杆部与摇臂104的第二端连接,所述第一拉杆部还连接至所述铰接部106,所述铰接部106还连接至所述第二拉杆部,这样可以单独更换或维修第一拉杆部、铰接部106和第二拉杆部三个部分。
34.更进一步的,由于敲槌单元105的第二拉杆部和槌子108需要对应乐器的不同发声部,同时,不同高度上的第二拉杆部需要能够接触到乐器的发声部,因此需要能够自由调节第二拉杆部的长度。但为了简化设计和配件的标准化,本实施例将第一拉杆部和第二拉杆部设计为固定长度,但是在摇臂104的第二端连接用于调节第一拉杆伸展长度的拉杆调节器103,这样通过调节每个第一拉杆的伸展长度即可间接调节每个第二拉杆部的间距和每个第二拉杆部与乐器之间的距离。具体的,所述拉杆调节器103固定在摇臂104的第二端,拉杆调节器103本体上设置有供所述第一拉杆部穿过的通孔,在与通孔延伸的方向垂直的方向上还设置有紧固件,该紧固件可以是带有旋钮的螺栓、螺钉或螺杆,通过紧固件固定第一拉杆部插入到通孔内的长度,从而间接调节第一拉杆部的伸展长度。
35.更进一步的,参见图4,最顶部的敲槌驱动部的第一舵机单元的上表面上设置有悬
挂装置,通过该悬挂装置可以将音乐演奏机器人悬挂于支架111的横梁上。同时,控制器本体110也可以通过控制器固定板109悬挂于支架111上。具体的,控制器固定板109可实际为u形结构,u形结构的封口处设置滑轮,将u形的控制器固定板109倒扣的方式悬挂于横梁上,还可以通过滑轮调节控制器所处位置,以便于控制器和机器人之间的布线。
36.更进一步的,为了增加悬挂状态的音乐演奏机器人的平衡性,将每组敲槌驱动部的第一拉杆部设计为彼此位于不同的平面上,即这些第一拉杆部相互之间不平行,也不共面。这样第一拉杆部分别在不同高度上以机器人的轴线为圆心指向不同的方向,既保持了机器人的平衡,又增加了演奏时的灵活度,相互之间也不会受到干扰。
37.图4示出了合奏状态的两个演奏机器人的悬挂状态,但是本实用新型并不限制合奏状态下机器人的数量。本实施例的控制器可以最多同一时间连接255个舵机,以支架结合,达到实验无限制音乐乐器合奏的效果。
38.本实用新型通过令舵机与控制器连接,再利用电脑上位机软件调试,以手动调整拉杆及槌子,读取位置及时间,生成动作组,比现有机械人操作更简单,动作更灵活,适合各种年龄及背景用户,进行实验创作。
39.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型保护的范围之内。