1.本发明涉及机器人技术领域,尤其涉及一种学生辅助教学用机器人。
背景技术:
2.机器人是自动执行工作的机器装置,它既可以接受人类的指挥,也可以运行预先先编排的程序,也可以根据以人工智能技术指定的原则纲领行动,他的任务是协助或者取代人类的工作,例如生产业、建筑业、或是危险的工作,机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围。
3.随着人们对机器人技术智能化本质认识的加深,机器人技术开始源源不断地向人类活动的各个领域渗透。结合这些领域的应用特点,人们发展了各式各样的具有感知、决策、行动和交互能力的特种机器人和各种智能机器人,目前的机器人应用于各行各业,例如教学机器人,通过人机互动增加联动性,提高学生学习的兴趣,而如何更好的使机器人进行教学工作,提高教学效果是目前亟需解决的问题。
技术实现要素:
4.本发明的目的是为了解决背景技术中的问题,而提出的一种学生辅助教学用机器人。
5.为了实现上述目的,本发明采用了如下技术方案:
6.一种学生辅助教学用机器人,包括本体,所述本体的下侧壁安装有行走装置,所述本体的上侧壁转动设置有显示屏,所述本体的上侧壁滑动插设有抵杆,所述抵杆的下端固定连接有伸缩弹簧,所述本体内设置调节机构,所述本体的外壁通过转轴转动连接有支撑板,所述支撑板上设置夹持机构,所述本体的外壁固定有电机,所述电机的驱动端固定连接有转盘,所述转盘的外壁转动连接有转板,所述转板的另一端与支撑板的端部转动连接,所述本体的外壁固定位于支撑板上侧的摄像头。
7.优选地,所述调节机构包括固定在本体内的导向板,所述导向板上滑动插设有挤压板,所述挤压板的外壁套设有复位弹簧,所述复位弹簧的两端分别与挤压板外壁以及导向板的下侧壁固定连接,所述挤压板的上端外壁上设置有斜面,所述本体内滑动设置有u型框,所述u型框与本体的内壁之间固定有卡紧弹簧,所述u型框的端部固定有与斜面相接触的圆柱,所述抵杆靠近u型框的一侧外壁由上至下均布有多个卡口。
8.优选地,所述夹持机构包括开设在支撑板上的两个滑槽,两个所述滑槽内均滑动设置有呈u型设置的移动板,所述移动板位于支撑板上侧的一端固定有夹板,所述支撑板的下侧壁固定嵌设有马达,所述马达的驱动端固定连接有与支撑板端部相接触的凸轮。
9.优选地,所述支撑板与凸轮的接触处呈弧形设置。
10.优选地,所述支撑板的内侧壁固定连接有导向杆,所述导向杆滑动插设在滑槽的内壁上,所述导向杆的外壁与滑槽的内壁之间固定连接有连接弹簧。
11.优选地,所述本体的上侧壁固定嵌设有轴承,所述轴承的内圈固定连接有安装板,所述显示屏与安装板的上端转动连接。
12.优选地,所述转轴的外壁上固定有齿轮,所述本体内滑动设置有与齿轮相啮合的齿板,所述齿板的上端固定安装有风扇,所述风扇朝向摄像头设置。
13.优选地,所述抵杆的上端固定连接有橡胶垫。
14.与现有的技术相比,本学生辅助教学用机器人的优点在于:
15.1、通过显示屏的转动和旋转实现可折叠和换向,避免了不使用时的落灰,减少了不使用时的占据空间,增加适用性;
16.2、设置调节机构,通过调节机构实现抵杆的上下运动,实现显示屏的支撑,便于调节显示屏的角度,增加适用性;
17.3、通过夹持机构进行物品的夹持,并通过支撑板的摆动使摄像头能拍摄更多角度,增加展示细节,更加有利于教学;
18.4、支撑板摆动的同时带动风扇上下移动,增加气流与摄像头接触的面积,提高散热效果,保证摄像头稳定高效工作;
19.综上所述,本发明通过显示屏的折叠和旋转实现显示屏的收纳和换向,增加适用性,通过支撑板夹持物品并进行摆动,增加展示细节,便于学生观察,提高教学效果。
附图说明
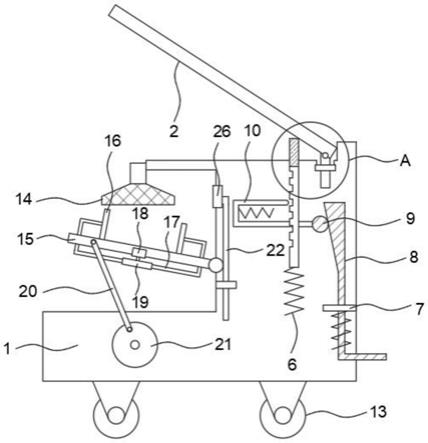
20.图1为本发明提出的一种学生辅助教学用机器人的结构示意图;
21.图2为图1中a部分结构的放大图;
22.图3为本发明提出的一种学生辅助教学用机器人中移动板和凸轮连接处的仰视图;
23.图4为本发明提出的一种学生辅助教学用机器人中支撑板的部分俯视图。
24.图中:1本体、2显示屏、3轴承、4安装板、5抵杆、6伸缩弹簧、7导向板、8挤压板、9圆柱、10u型框、11卡口、12橡胶垫、13行走装置、14摄像头、15支撑板、16夹板、17移动板、18马达、19凸轮、20转板、21转盘、22齿板、23滑槽、24导向杆、25连接弹簧、26风扇。
具体实施方式
25.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
26.在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
27.参照图1-4,一种学生辅助教学用机器人,包括本体1,本体1的下侧壁安装有行走装置13,行走装置13为滚轮,可通过电动机等驱动机构进行驱动,本体1的上侧壁转动设置有显示屏2,本体1的上侧壁固定嵌设有轴承3,轴承3的内圈固定连接有安装板4,显示屏2与安装板4的上端转动连接,显示屏2通过安装板4在轴承3内的转动调节显示端的朝向,正常状态下,显示端向下朝向本体1设置,避免显示端落灰,当使用显示屏2时,将显示屏2转起,
转动安装板4改变显示端的朝向。
28.本体1的上侧壁滑动插设有抵杆5,抵杆5的上端固定连接有橡胶垫12,设置橡胶垫12与显示屏2接触,避免了硬物与显示屏2接触造成的损坏,抵杆5的下端固定连接有伸缩弹簧6,本体1内设置调节机构,调节机构包括固定在本体1内的导向板7,导向板7上滑动插设有挤压板8,挤压板8的外壁套设有复位弹簧,复位弹簧的两端分别与挤压板8外壁以及导向板7的下侧壁固定连接,挤压板8的上端外壁上设置有斜面,本体1内滑动设置有u型框10,u型框10与本体1的内壁之间固定有卡紧弹簧,u型框10的端部固定有与斜面相接触的圆柱9,抵杆5靠近u型框10的一侧外壁由上至下均布有多个卡口11,正常u型框10的端部卡在卡口11内进行抵杆5的限位,当显示屏2转起需要进行支撑时,踩压挤压板8的下端,挤压板8往下移动挤压圆柱9和u型框10进行移动,u型框10的端部脱离卡口11,在伸缩弹簧6的反向弹力下抵杆5往上移动进行显示屏2的支撑,松开挤压板8,挤压板8在复位弹簧的作用下回移,在卡紧弹簧的作用下u型框10回移,端部卡入卡口11内进行抵杆5的限位,阻止抵杆5回移,保证抵杆5状态的稳定,后续进行显示屏2的收回时,再次踩压挤压板8,使u型框10脱离卡口11,往下按压显示屏2进行收回挤压抵杆5下移,松开挤压板8再次进行抵杆5的固定即可。
29.进一步地,挤压板8还可通过气缸等伸缩机构带动其进行上下移动。
30.本体1的外壁通过转轴转动连接有支撑板15,支撑板15上设置夹持机构,夹持机构包括开设在支撑板15上的两个滑槽23,两个滑槽23内均滑动设置有呈u型设置的移动板17,支撑板15的内侧壁固定连接有导向杆24,导向杆24滑动插设在滑槽23的内壁上,导向杆24的外壁与滑槽23的内壁之间固定连接有连接弹簧25,移动板17位于支撑板15上侧的一端固定有夹板16,支撑板15的下侧壁固定嵌设有马达18,马达18的驱动端固定连接有与支撑板15端部相接触的凸轮19,支撑板15与凸轮19的接触处呈弧形设置,马达18带动凸轮19转动,凸轮19的端部与支撑板15的端部接触,挤压支撑板15往外侧移动,带动夹板16往外侧移动,将待展示的物品放在支撑板15上,马达18的驱动端反转,在连接弹簧25的反向弹力下夹板16回移与物品接触,实现物品的夹持,保证后续支撑板15摆动过程中物品的稳定。
31.本体1的外壁固定有电机,电机的驱动端固定连接有转盘21,转盘21的外壁转动连接有转板20,转板20的另一端与支撑板15的端部转动连接,本体1的外壁固定位于支撑板15上侧的摄像头14,电机带动转盘21转动,转盘21带动转板20的下端做圆周运动,转板20的上端做上下的往复运动,带动支撑板15进行摆动,使摄像头14能进行物品的多位置拍摄展示,增加展示细节。
32.进一步地,摄像头14与显示屏2连接,拍摄的内容通过显示屏2展示。
33.转轴的外壁上固定有齿轮,本体1内滑动设置有与齿轮相啮合的齿板22,齿板22的上端固定安装有风扇26,风扇26朝向摄像头14设置,在支撑板15往复摆动的过程中,通过转轴实现齿轮的往复转动,带动齿板22上下运动,实现风扇26的上下运动,实现风扇26吹出气流与摄像头14的上下接触,增加散热面积,保证摄像头14工作的稳定。
34.进一步说明,上述固定连接,除非另有明确的规定和限定,否则应做广义理解,例如,可以是焊接,也可以是胶合,或者一体成型设置等本领域技术人员熟知的惯用手段。
35.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。