1.本发明涉及机械臂抓取作业技术领域,尤其涉及一种工业机器人的智能机械臂。
背景技术:
2.在人机交互过程中,传统的键盘、手柄控制方式较为繁琐,既依赖外界不断的操控又不符合人们的交互习惯,难以满足人们的实际需求。体感技术可以直观地传达人体动作,使得交互自然化、简单化,为解决机械臂在未知环境中的自主控制问题提供了解决方案。
3.传统大型机械臂往往需要熟练工人在一旁操作配合,虽是人机协作,却严重浪费了机器潜力和劳动力资源。此外,机械臂的轨迹运动与抓取姿态也是研究的重点,所以我们提出一种工业机器人的智能机械臂,用以解决上述所提到的问题。
技术实现要素:
4.本发明的目的是为了解决现有技术中存在的缺点,而提出的一种工业机器人的智能机械臂。
5.为了实现上述目的,本发明采用了如下技术方案:
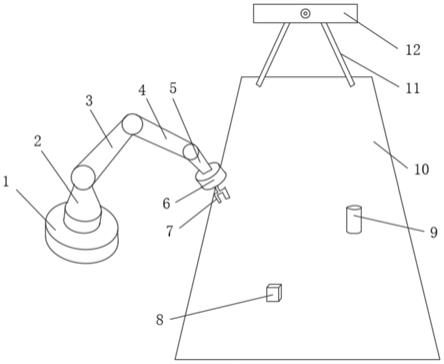
6.一种工业机器人的智能机械臂,包括底座和夹取平台,所述夹取平台的顶部设置有第一夹取件和第二夹取件,所述夹取平台的顶部一侧固定连接有支架,所述支架的顶部固定连接有工作台摄像头,所述底座的顶部固定连接有肩,所述肩的顶部转动连接有大臂,所述大臂远离肩的一端转动连接有小臂,所述小臂远离大臂的一端转动连接有手腕,所述手腕的另一端设置有用于夹取第一夹取件和第二夹取件的夹取组件。
7.优选地,所述夹取组件包括安装板和固定连接在手腕一端的安装盘,所述安装盘的内部开设有安装槽,所述安装盘的内部呈环形设置有多个分别与安装槽相连通的卡槽,所述安装槽的一侧内壁固定连接有多个弹簧,所述弹簧的另一端固定连接有挡块,所述安装板的外表面呈环形固定连接有多个与卡槽相卡合的卡块,所述安装板的一侧安装有末端夹取器。
8.优选地,多个所述挡块靠近弹簧的一侧均固定连接有拉杆,所述弹簧套设在拉杆上,多个所述拉杆远离挡块的一端均贯穿安装盘并固定连接有同一个拉环。
9.优选地,所述末端夹取器上安装有末端执行器摄像头。
10.优选地,所述末端夹取器和第一夹取件的形状和大小各有不同。
11.优选地,所述肩、大臂、小臂和手腕之间的转动点处均设有舵机驱动模块。
12.依据图10一种工业机器人的智能机械臂的操作步骤:
13.s1、利用两个九轴传感器,将手部姿态与手部位置通过蓝牙发送给机械臂控制端;
14.s2、通过机械臂运动学逆解,将手部位置变换到机械臂坐标系并对应到末端执行器,计算得到机械臂舵机转动角度;
15.s3、驱动舵机转动,使末端执行器尾部,即机械臂腕部到达对应位置;
16.s4、利用手部姿态信息,控制末端执行器的上下摆动与左右转动,对于柱状物体,
采用水平方向的侧边夹持姿态;
17.s5、夹持成功后,将对应各个舵机的转动角度、环境状态、动作奖励等保存,在仿真环境中存入经验池;
18.s6、适当多次存入成功经验,存储后进行仿真环境下的强化学习,机械臂通过机器视觉得到目标点位置信息,由运动学逆解得到所需舵机角度,达到目标物体一定半径以内范围,根据模型输出动作,改变末端执行器摆动与旋转角度,以及腕部达到目标物体半径内的位置;
19.s7、机械臂触及平台、或舵机旋转角度超过限定,单次学习视为失败,机械臂成功达到合适夹持角度并停留一段时间,单次学习视为成功;
20.s8、机械臂各关节每转动一次,环境奖励便-1;对比末端执行器转动角度与实际物体所需角度,同样将两者差值作为环境奖励,即当机械臂一次性到达指定位置并采取合适夹持角度时,总的环境奖励最大为-1;
21.s9、将学习好的模型进行迁移,在实际环境中训练,利用体感控制输入多位置、多角度成功经验,增强学习效果;
22.s10、机械臂模型具有了成功抓取柱状物体的能力,可依据摄像头计算位置与角度,采用合适姿态进行抓取;
23.s11、针对其余形态物体,同样可建立另一强化学习模型,利用体感控制增强学习效率,在识别物体时切换不同模型,即可实现不同物体的抓取。
24.与现有技术相比,本发明的有益效果是:
25.1、通过将体感控制与强化学习结合,同时解决了智能机械臂学习缓慢与控制复杂的问题;
26.2、通过体感控制,使机械臂以特定方式完成某一类特定物体的抓取,这一过程视为一次成功,既符合了不同物体的针对性需求,同时作为一次确定性成功策略存储入强化学习的神经网络中,解决了强化学习初始阶段大量探索而不能有一次成功的局限;
27.3、针对同一物体的不同位置、不同角度,多次利用体感控制给出正确策略,大大缩短强化学习找到正确策略的时间,并在此之后以此类策略为正确经验,在仿真平台进行大量自主学习,在学习完毕后,仿真模型应用于实际机械臂,抓取实际物体;
28.4、针对不同物体的抓取,同样由体感给出符合要求的姿态与抓取方式,利用如上方式进行学习;
29.5、针对不同外形,采用摄像头对物体进行识别,按不同类型进行强化学习的探索,形成确定策略后即可抓取,从而对于不同种类物体,机械臂可以按照对应的不同种类的类人姿态完成任务;
30.6、对于任意物体,由体感给出特定的抓取方法,如针对柱状物体从侧边横向抓取,针对方形物体从上方竖向抓取,以少量体感经验作为正确经验输入,在此基础上进行强化学习并应用于实际机械臂,从而在学习后对同一类型物体,在不同位置、不同角度均可采用合适的抓取姿态。
31.本发明中,该机械臂小能适应桌面协作、大可配合流水线分拣,可以代替人类完成重复性的劳动,且具有一定学习能力,可以胜任无法直接调试的复杂任务场景,解决传统弊端,更适应用户与社会需求。
附图说明
32.图1为本发明提出的一种工业机器人的智能机械臂的总体结构示意图;
33.图2为本发明中机械臂的主视结构示意图;
34.图3为本发明中机械臂的侧视结构示意图;
35.图4为本发明中机械臂的俯视结构示意图;
36.图5为本发明姿态角示意图;
37.图6为本发明中安装盘的侧视剖视结构示意图;
38.图7为本发明中安装盘的后视结构示意图;
39.图8为本发明中安装盘的主视结构示意图;
40.图9为本发明中安装板的主视结构示意图;
41.图10为本发明结构框图;
42.图11为本发明的工作流程图。
43.图中:1、底座;2、肩;3、大臂;4、小臂;5、手腕;6、安装盘;7、末端夹取器;8、第一夹取件;9、第二夹取件;10、夹取平台;11、支架;12、工作台摄像头;13、卡槽;14、挡块;15、拉环;16、弹簧;17、拉杆;18、安装槽;19、安装板;20、卡块。
具体实施方式
44.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
45.实施例一
46.参照图1-11,一种工业机器人的智能机械臂,包括底座1和夹取平台10,夹取平台10的顶部设置有第一夹取件8和第二夹取件9,夹取平台10的顶部一侧固定连接有支架11,支架11的顶部固定连接有工作台摄像头12,底座1的顶部固定连接有肩2,肩2的顶部转动连接有大臂3,大臂3远离肩2的一端转动连接有小臂4,小臂4远离大臂3的一端转动连接有手腕5,手腕5的另一端设置有用于夹取第一夹取件8和第二夹取件9的夹取组件。
47.实施例二
48.本实施例在实施例一的基础上进行改进:夹取组件包括安装板19和固定连接在手腕5一端的安装盘6,安装盘6的内部开设有安装槽18,安装盘6的内部呈环形设置有多个分别与安装槽18相连通的卡槽13,安装槽18的一侧内壁固定连接有多个弹簧16,弹簧16的另一端固定连接有挡块14,安装板19的外表面呈环形固定连接有多个与卡槽13相卡合的卡块20,安装板19的一侧安装有末端夹取器7。
49.实施例三
50.本实施例在实施例一的基础上进行改进:多个挡块14靠近弹簧16的一侧均固定连接有拉杆17,弹簧16套设在拉杆17上,多个拉杆17远离挡块14的一端均贯穿安装盘6并固定连接有同一个拉环15,末端夹取器7上安装有末端执行器摄像头,末端夹取器7和第一夹取件8的形状和大小各有不同,肩2、大臂3、小臂4和手腕5之间的转动点处均设有舵机驱动模块;
51.依据图10一种工业机器人的智能机械臂的操作步骤:
52.s1、利用两个九轴传感器,将手部姿态与手部位置通过蓝牙发送给机械臂控制端;
53.s2、通过机械臂运动学逆解,将手部位置变换到机械臂坐标系并对应到末端执行器,计算得到机械臂舵机转动角度;
54.s3、驱动舵机转动,使末端执行器尾部,即机械臂腕部到达对应位置;
55.s4、利用手部姿态信息,控制末端执行器的上下摆动与左右转动,对于柱状物体,采用水平方向的侧边夹持姿态;
56.s5、夹持成功后,将对应各个舵机的转动角度、环境状态、动作奖励等保存,在仿真环境中存入经验池;
57.s6、适当多次存入成功经验,存储后进行仿真环境下的强化学习,机械臂通过机器视觉得到目标点位置信息,由运动学逆解得到所需舵机角度,达到目标物体一定半径以内范围,根据模型输出动作,改变末端执行器摆动与旋转角度,以及腕部达到目标物体半径内的位置;
58.s7、机械臂触及平台、或舵机旋转角度超过限定,单次学习视为失败,机械臂成功达到合适夹持角度并停留一段时间,单次学习视为成功;
59.s8、机械臂各关节每转动一次,环境奖励便-1;对比末端执行器转动角度与实际物体所需角度,同样将两者差值作为环境奖励,即当机械臂一次性到达指定位置并采取合适夹持角度时,总的环境奖励最大为-1;
60.s9、将学习好的模型进行迁移,在实际环境中训练,利用体感控制输入多位置、多角度成功经验,增强学习效果;
61.s10、机械臂模型具有了成功抓取柱状物体的能力,可依据摄像头计算位置与角度,采用合适姿态进行抓取;
62.s11、针对其余形态物体,同样可建立另一强化学习模型,利用体感控制增强学习效率,在识别物体时切换不同模型,即可实现不同物体的抓取。
63.工作原理:利用两个九轴传感器,将手部姿态与手部位置通过蓝牙发送给机械臂控制端;通过机械臂运动学逆解,将手部位置变换到机械臂坐标系并对应到末端执行器,计算得到机械臂舵机转动角度;驱动舵机转动,使末端执行器尾部,即机械臂腕部到达对应位置;利用手部姿态信息,控制末端执行器的上下摆动与左右转动。对于柱状物体,采用水平方向的侧边夹持姿态;夹持成功后,将对应各个舵机的转动角度、环境状态、动作奖励等保存,在仿真环境中存入经验池;适当多次存入成功经验,存储后进行仿真环境下的强化学习,机械臂通过机器视觉得到目标点位置信息,由运动学逆解得到所需舵机角度,达到目标物体一定半径以内范围,根据模型输出动作,改变末端执行器摆动与旋转角度,以及腕部达到目标物体半径内的位置;机械臂触及平台、或舵机旋转角度超过限定,单次学习视为失败;机械臂成功达到合适夹持角度并停留一段时间,单次学习视为成功;机械臂各关节每转动一次,环境奖励便-1;对比末端执行器转动角度与实际物体所需角度,同样将两者差值作为环境奖励。即当机械臂一次性到达指定位置并采取合适夹持角度时,总的环境奖励最大为-1;将学习好的模型进行迁移,在实际环境中训练,利用体感控制输入多位置、多角度成功经验,增强学习效果;机械臂模型具有了成功抓取柱状物体的能力,可依据摄像头计算位置与角度,采用合适姿态进行抓取;针对其余形态物体,同样可建立另一强化学习模型,利用体感控制增强学习效率,在识别物体时切换不同模型,即可实现不同物体的抓取,在需要更换末端夹取器7时,用手拉动拉环15,拉环15带动拉杆17移动,拉杆17带动挡块14移动并
挤压弹簧16,进而可以解除卡块20与卡槽13的卡合状态,转动安装板19即可取出安装板19,再用手竖直向下按压新的安装板19,安装板19带动卡块20竖直向下移动,卡块20推动挡块14并挤压弹簧16,转动安装板19,安装板19带动卡块20转动,卡块20与卡槽13卡合,完成对安装板19的安装。
64.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。