1.本实用新型涉及机器人技术领域,具体涉及一种焊接搬运两用机器人。
背景技术:
2.机器人是一种能够半自主或全自主工作的智能机器。机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围。
3.由于机器人是根据指令行事,所以在工作时,工作项目较为单一,如焊接机器人仅仅只能承接焊接工作,搬运机器人仅仅只能承接搬运工作。
技术实现要素:
4.鉴于现有技术中的上述缺陷或不足,期望提供一种焊接搬运两用机器人。
5.根据本申请实施例提供的技术方案,一种焊接搬运两用机器人,包括底座、支撑杆,所述支撑杆固定在所述底座上,还包括搬运臂、焊接臂和旋转装置,所述焊接臂电动铰接所述支撑杆,所述搬运臂通过销轴铰接所述焊接臂,所述搬运臂的上端面通过所述旋转装置固定连接所述焊接臂的上端面,
6.所述搬运臂包括电动吸盘、臂杆、焊接头放置槽和螺杆槽,所述臂杆为水平放置的圆柱体形状,所述电动吸盘固定在所述臂杆的左端面上,所述焊接头放置槽位于所述臂杆的右端面上,所述焊接头放置槽为长方形槽体,所述焊接头放置槽贯穿于所述臂杆的上端面和下端面,所述螺杆槽为水平槽体,所述螺杆槽位于所述臂杆的右端面上,所述螺杆槽内设有螺纹,
7.所述焊接臂包括焊接头、连接块、焊接臂杆、旋转电机放置内腔、螺杆、螺杆放置孔,所述焊接头通过所述连接块固定连接所述焊接臂杆,所述旋转电机放置内腔位于所述焊接臂杆内,所述螺杆放置孔为水平放置孔洞,所述螺杆放置孔贯穿于所述焊接臂杆的左端面和右端面,所述螺杆通过螺纹放置在所述螺杆放置孔内,所述旋转电机放置内腔内固定设置旋转电机,所述旋转电机通过皮带轮连接所述螺杆,所述皮带轮通过转盘固定在所述旋转电机放置内腔的侧端面上,
8.所述旋转装置包括钢丝绳、步进电机、支撑杆a,所述支撑杆a固定在所述焊接臂的上端面上,所述步进电机固定在所述支撑杆a上,所述钢丝绳的一端通过连接组件固定连接所述搬运臂的上端面,所述钢丝绳的另一端通过滚轮固定连接所述步进电机。
9.本实用新型中,所述螺杆槽、所述螺杆放置孔位于同一条直线上,所述螺杆可通过螺纹穿进所述螺杆槽。
10.本实用新型中,所述搬运臂可通过所述旋转装置以所述销轴旋转。
11.本实用新型中,所述螺杆、所述螺杆槽、所述螺杆放置孔的数量均为两个。
12.本实用新型中,所述搬运臂和所述焊接臂均为不锈钢材质。
13.本实用新型中,所述电动吸盘、所述旋转电机、所述步进电机均通过电线连接控制
装置。
14.综上所述,本申请的有益效果:本申请装置为焊接搬运两用机器人,能自动切换工作用具,适用范围较广。
附图说明
15.通过阅读参照以下附图所作的对非限制性实施例所作的详细描述,本申请的其它特征、目的和优点将会变得更明显:
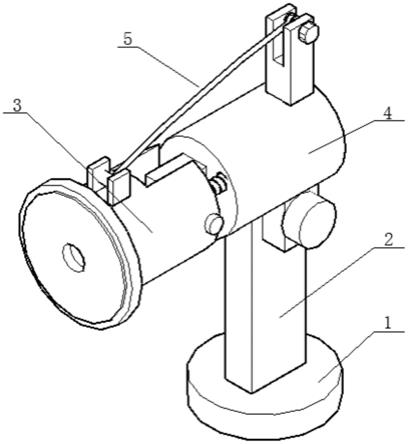
16.图1为本实用新型整体装置的立体结构示意图;
17.图2为本实用新型整体装置的俯视结构示意图;
18.图3为本实用新型搬运臂的右侧视结构示意图;
19.图4为本实用新型焊接臂的剖视结构示意图;
20.图5为本实用新型旋转装置的立体结构示意图。
21.图中标号:底座-1;支撑杆-2;搬运臂-3;电动吸盘-3.1;臂杆-3.2;焊接头放置槽-3.3;螺杆槽-3.4;焊接臂-4;焊接头-4.1;连接块-4.2;焊接臂杆-4.3;旋转电机放置内腔-4.4;螺杆-4.5;螺杆放置孔-4.6;旋转装置-5;钢丝绳-5.1;步进电机-5.2;支撑杆a-5.3。
具体实施方式
22.下面结合附图和实施例对本申请作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释相关发明,而非对该发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与发明相关的部分。
23.需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本申请。
24.如图1和图2所示,一种焊接搬运两用机器人,包括底座1、支撑杆2,所述支撑杆2固定在所述底座1上,还包括搬运臂3、焊接臂4和旋转装置5,所述焊接臂4电动铰接所述支撑杆2,所述搬运臂3通过销轴铰接所述焊接臂4,所述搬运臂3的上端面通过所述旋转装置5固定连接所述焊接臂4的上端面。
25.如图3所示,所述搬运臂3包括电动吸盘3.1、臂杆3.2、焊接头放置槽3.3和螺杆槽3.4,所述臂杆3.2为水平放置的圆柱体形状,所述电动吸盘3.1固定在所述臂杆3.2的左端面上,所述焊接头放置槽3.3位于所述臂杆3.2的右端面上,所述焊接头放置槽3.3为长方形槽体,所述焊接头放置槽3.3贯穿于所述臂杆3.2的上端面和下端面,所述螺杆槽3.4为水平槽体,所述螺杆槽3.4位于所述臂杆3.2的右端面上,所述螺杆槽3.4内设有螺纹。
26.如图4所示,所述焊接臂4包括焊接头4.1、连接块4.2、焊接臂杆4.3、旋转电机放置内腔4.4、螺杆4.5、螺杆放置孔4.6,所述焊接头4.1通过所述连接块4.2固定连接所述焊接臂杆4.3,所述旋转电机放置内腔4.4 位于所述焊接臂杆4.3内,所述螺杆放置孔4.6为水平放置孔洞,所述螺杆放置孔4.6贯穿于所述焊接臂杆4.3的左端面和右端面,所述螺杆4.5 通过螺纹放置在所述螺杆放置孔4.6内,所述旋转电机放置内腔4.4内固定设置旋转电机,所述旋转电机通过皮带轮连接所述螺杆4.5,所述皮带轮通过转盘固定在所述旋转电机放置内腔4.4的侧端面上。
27.如图5所示,所述旋转装置5包括钢丝绳5.1、步进电机5.2、支撑杆 a5.3,所述支撑杆a5.3固定在所述焊接臂4的上端面上,所述步进电机5.2 固定在所述支撑杆a5.3上,所述钢丝绳5.1的一端通过连接组件固定连接所述搬运臂3的上端面,所述钢丝绳5.1的另一端通过滚轮固定连接所述步进电机5.2。
28.所述旋转装置5通过所述步进电机5.2拉动所述钢丝绳5.1,使得所述搬运臂3沿着所述销轴向上转动,使得所述焊接臂4的所述焊接头4.1露出,便于工作。
29.当需要使用所述搬运臂3时,由于所述搬运臂3的自身重量,所述搬运臂3将会沿着所述销轴恢复到原来的状态,然后启动所述旋转电机放置内腔4.4内的所述旋转电机,使得所述螺杆4.5旋转,将所述螺杆4.5的前端部位插入到所述搬运臂3上的所述螺杆槽3.4内,实现所述搬运臂3与所述焊接臂4之间的连接,便于搬运重物。
30.使用时,所述支撑杆2通过电动转动,可以实现所述焊接臂4的角度调节。
31.以上描述仅为本申请的较佳实施例以及对所运用技术原理等方案的说明。同时,本申请中所涉及的发明范围,并不限于上述技术特征的特定组合而成的技术方案,同时也应涵盖在不脱离所述发明构思的情况下,由上述技术特征或其等同特征进行任意组合而形成的其它技术方案。例如上述特征与本申请中公开的(但不限于)具有类似功能的技术特征进行互相替换而形成的技术方案。
技术特征:
1.一种焊接搬运两用机器人,包括底座(1)、支撑杆(2),所述支撑杆(2)固定在所述底座(1)上,其特征是:还包括搬运臂(3)、焊接臂(4)和旋转装置(5),所述焊接臂(4)电动铰接所述支撑杆(2),所述搬运臂(3)通过销轴铰接所述焊接臂(4),所述搬运臂(3)的上端面通过所述旋转装置(5)固定连接所述焊接臂(4)的上端面,所述搬运臂(3)包括电动吸盘(3.1)、臂杆(3.2)、焊接头放置槽(3.3)和螺杆槽(3.4),所述臂杆(3.2)为水平放置的圆柱体形状,所述电动吸盘(3.1)固定在所述臂杆(3.2)的左端面上,所述焊接头放置槽(3.3)位于所述臂杆(3.2)的右端面上,所述焊接头放置槽(3.3)为长方形槽体,所述焊接头放置槽(3.3)贯穿于所述臂杆(3.2)的上端面和下端面,所述螺杆槽(3.4)为水平槽体,所述螺杆槽(3.4)位于所述臂杆(3.2)的右端面上,所述螺杆槽(3.4)内设有螺纹,所述焊接臂(4)包括焊接头(4.1)、连接块(4.2)、焊接臂杆(4.3)、旋转电机放置内腔(4.4)、螺杆(4.5)、螺杆放置孔(4.6),所述焊接头(4.1)通过所述连接块(4.2)固定连接所述焊接臂杆(4.3),所述旋转电机放置内腔(4.4)位于所述焊接臂杆(4.3)内,所述螺杆放置孔(4.6)为水平放置孔洞,所述螺杆放置孔(4.6)贯穿于所述焊接臂杆(4.3)的左端面和右端面,所述螺杆(4.5)通过螺纹放置在所述螺杆放置孔(4.6)内,所述旋转电机放置内腔(4.4)内固定设置旋转电机,所述旋转电机通过皮带轮连接所述螺杆(4.5),所述皮带轮通过转盘固定在所述旋转电机放置内腔(4.4)的侧端面上,所述旋转装置(5)包括钢丝绳(5.1)、步进电机(5.2)、支撑杆a(5.3),所述支撑杆a(5.3)固定在所述焊接臂(4)的上端面上,所述步进电机(5.2)固定在所述支撑杆a(5.3)上,所述钢丝绳(5.1)的一端通过连接组件固定连接所述搬运臂(3)的上端面,所述钢丝绳(5.1)的另一端通过滚轮固定连接所述步进电机(5.2)。2.根据权利要求1所述的一种焊接搬运两用机器人,其特征是:所述螺杆槽(3.4)、所述螺杆放置孔(4.6)位于同一条直线上,所述螺杆(4.5)可通过螺纹穿进所述螺杆槽(3.4)。3.根据权利要求1所述的一种焊接搬运两用机器人,其特征是:所述搬运臂(3)可通过所述旋转装置(5)以所述销轴旋转。4.根据权利要求1所述的一种焊接搬运两用机器人,其特征是:所述螺杆(4.5)、所述螺杆槽(3.4)、所述螺杆放置孔(4.6)的数量均为两个。5.根据权利要求1所述的一种焊接搬运两用机器人,其特征是:所述搬运臂(3)和所述焊接臂(4)均为不锈钢材质。6.根据权利要求1所述的一种焊接搬运两用机器人,其特征是:所述电动吸盘(3.1)、所述旋转电机、所述步进电机(5.2)均通过电线连接控制装置。
技术总结
本实用新型公开了一种焊接搬运两用机器人,包括底座、支撑杆,所述支撑杆固定在所述底座上,还包括搬运臂、焊接臂和旋转装置,所述焊接臂电动铰接所述支撑杆,所述搬运臂通过销轴铰接所述焊接臂,所述搬运臂的上端面通过所述旋转装置固定连接所述焊接臂的上端面,所述搬运臂包括电动吸盘、臂杆、焊接头放置槽和螺杆槽,所述焊接臂包括焊接头、连接块、焊接臂杆、旋转电机放置内腔、螺杆、螺杆放置孔,所述旋转装置包括钢丝绳、步进电机、支撑杆A,所述钢丝绳的一端通过连接组件固定连接所述搬运臂的上端面,所述钢丝绳的另一端通过滚轮固定连接所述步进电机。本申请装置为焊接搬运两用机器人,能自动切换工作用具,适用范围较广。适用范围较广。适用范围较广。
技术研发人员:田俊嵩
受保护的技术使用者:廊坊那川机器人科技有限公司
技术研发日:2021.09.18
技术公布日:2022/2/11