舵盘主体,33-卡接块,34-卡接槽,100-机械手手掌,200-机械手手指。
具体实施方式
17.下面结合附图和实施例,对本实用新型的具体实施方式作进一步详细描述。以下实施例用于说明本实用新型,但不用来限制本实用新型的范围。
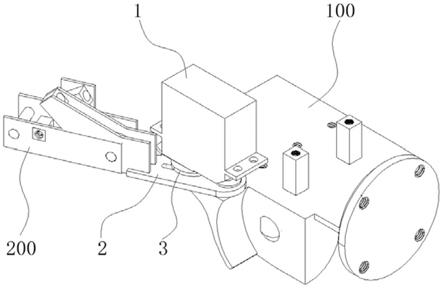
18.如图1所示,本实用新型实施例优选实施例的一种机械手手指摆动机构,包括驱动机构1、手指摆动板2及舵盘3,所述手指摆动板2的一端与机械手手掌100铰接,所述手指摆动板2的另一端用于连接机械手手指200,所述驱动机构1通过所述舵盘3驱动所述手指摆动板2摆动,实现机械手手指200的摆动。所述驱动机构1优选舵机,机械手上设有安装架,所述舵机固定在所述安装架上。
19.基于上述技术特征的机械手手指摆动机构,通过设置手指摆动板2,并将手指摆动板2的一端与机械手手掌100铰接,另一端连接机械手手指200,需要摆动时驱动机构1驱动舵盘3,舵盘3驱动手指摆动板2带动机械手手指200摆动,从而使得机械手手指200能像人手一样实现摆动,从而提高了其使用灵活度,增加了其应用范围。本实用新型结构简单,使用效果好,易于推广使用。
20.请参阅附图2,本实施例中,所述手指摆动板2的中部沿其长度方向设有摆臂孔21,所述舵盘3上设有驱动柱31,所述驱动柱31滑接于所述摆臂孔21内。摆动时所述驱动机构1驱动所述舵盘3转动,使得所述驱动柱31绕所述舵盘3的中心转动,由于其设于所述摆臂孔21内,从而驱动所述手指摆动板2绕其与所述机械手手掌100的铰接点转动,实现了机械手手指200的摆动。较佳地,所述摆臂孔21为腰型孔,若其长度为a,宽度为b,则其之间满足a:b=3.5:1-4.5:1,优选4:1。
21.请参阅附图3,本实施例中,所述舵盘3包括舵盘主体32,所述舵盘主体32的上表面用于连接所述驱动机构1,所述驱动柱31设置在所述舵盘主体32的下表面。为便于与所述驱动机构1安装,所述舵盘主体32的上表面设有卡接块33,所述卡接块33内设有多边形卡接槽34(如三角形、四边形),所述驱动机构1的输出轴插接在所述卡接槽34内。同时,所述手指摆动板2连接机械手手指200的一端设有多个安装槽22,所述机械手手指200与所述安装槽22连接,安装简单方便。
22.以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型技术原理的前提下,还可以做出若干改进和替换,这些改进和替换也应视为本实用新型的保护范围。
技术特征:
1.一种机械手手指摆动机构,其特征在于:包括驱动机构、手指摆动板及舵盘,所述手指摆动板的一端与机械手手掌铰接,所述手指摆动板的另一端用于连接机械手手指,所述驱动机构通过所述舵盘驱动所述手指摆动板摆动,实现机械手手指的摆动。2.如权利要求1所述的机械手手指摆动机构,其特征在于:所述手指摆动板的中部沿其长度方向设有摆臂孔,所述舵盘上设有驱动柱,所述驱动柱滑接于所述摆臂孔内。3.如权利要求2所述的机械手手指摆动机构,其特征在于:所述摆臂孔为腰型孔,其长度为a,宽度为b,a:b=3.5:1-4.5:1。4.如权利要求2所述的机械手手指摆动机构,其特征在于:所述舵盘包括舵盘主体,所述舵盘主体的上表面用于连接所述驱动机构,所述驱动柱设置在所述舵盘主体的下表面。5.如权利要求4所述的机械手手指摆动机构,其特征在于:所述舵盘主体的上表面设有卡接块,所述卡接块内设有多边形卡接槽,所述驱动机构的输出轴插接在所述卡接槽内。6.如权利要求4所述的机械手手指摆动机构,其特征在于:所述手指摆动板连接机械手手指的一端设有多个安装槽,所述机械手手指与所述安装槽连接。7.如权利要求1所述的机械手手指摆动机构,其特征在于:所述驱动机构为舵机。
技术总结
本实用新型涉及机械手技术领域,公开了一种机械手手指摆动机构,包括驱动机构、手指摆动板及舵盘,所述手指摆动板的一端与机械手手掌铰接,所述手指摆动板的另一端用于连接机械手手指,所述驱动机构通过所述舵盘驱动所述手指摆动板摆动,实现机械手手指的摆动。本实用新型提供的机械手手指摆动机构,通过设置手指摆动板,并将手指摆动板的一端与机械手手掌铰接,另一端连接机械手手指,需要摆动时驱动机构驱动舵盘,舵盘驱动手指摆动板带动机械手手指摆动,从而使得机械手手指能像人手一样实现摆动,从而提高了其使用灵活度,增加了其应用范围。本实用新型结构简单,使用效果好,易于推广使用。广使用。广使用。
技术研发人员:雷国华
受保护的技术使用者:清远市雷巧机器人有限公司
技术研发日:2021.09.27
技术公布日:2022/2/11