1.本实用新型涉及机器人技术领域,尤其涉及一种装配式拖链型生产机器人。
背景技术:
2.在具备支承机器人的台车部并使机器人沿轨道部移动的机器人行走装置中,已知以下一种将收容与机器人连接的线缆的线缆拖链铺设于台车部的下侧的结构(例如日本特开2005-096018号公报)。在以往的机器人行走装置中,无法在与沿轨道部设置的机械(例如加工机)之间确保充分的空间,因此使用者难以在物理上接近该机械以对该机械实施维护等作业。
3.为了解决上述问题,经检索,中国专利申请号为cn201621442110.4的专利,公开了一种车身柔性装配定位三轴机器人用y轴移动系统,包括y轴支架、y轴伺服电机、y轴同步传动带、y轴同步带轮、y轴直线导轨、y轴精密滚珠丝杠和y轴拖链机构,其特征在于,所述y轴支架的上方安装有y轴拖链机构,所述y轴伺服电机安装在y轴支架的前侧面,在y轴伺服电机的头部安装有y轴伺服电机轮,所述y轴支架的左侧面平行安装有两组y轴直线导轨。上述专利中的车身柔性装配定位三轴机器人用y轴移动系统存在以下不足:机器人进行工件加工时产生的废料极易溅入移动机构中,长此以往会造成严重堵塞,影响设备的正常运行。
技术实现要素:
4.本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种装配式拖链型生产机器人。
5.为了实现上述目的,本实用新型采用了如下技术方案:
6.一种装配式拖链型生产机器人,包括固定连接于底座顶部外壁的安装座,所述安装座的顶部外壁通过直线往复式活动部连接有移动板,移动板的两侧外壁分别固定连接有前防护板和后防护板,移动板的另外两侧外壁均固定连接有直线铠甲式风琴罩;所述移动板的一侧外壁固定连接有位移测量组;所述移动板的顶部外壁固定连接有固定基座。
7.作为本实用新型进一步的方案:所述安装座的两端均固定连接有轴边板。
8.作为本实用新型再进一步的方案:所述直线往复式活动部包括转动柱和电机b,所述转动柱的一端转动连接于轴边板的一侧外壁,转动柱的外壁通过螺纹与移动板的内壁相连接;所述电机b的底部外壁固定连接于安装座的顶部外壁,且电机b的输出端通过传动轴与转动柱的另一端相连接。
9.作为本实用新型一种优选的:所述安装座靠近两侧的顶部外壁设置有限位轨。
10.作为本实用新型进一步优选的:所述安装座的一侧外壁固定连接有拖链组件,拖链组件由拖链一和拖链二构成。
11.作为本实用新型再进一步优选的:所述拖链组件的底部外壁固定连接有支撑板。
12.作为本实用新型在前述方案的基础上:所述固定基座的一侧外壁通过支板连接有电机a,固定基座的另一侧外壁通过转轴转动连接有传动臂,电机a的输出端通过联轴器与
传动臂的输入端相连接。
13.作为本实用新型在前述方案的基础上优选的:所述传动臂靠近一端的一侧外壁通过转轴转动连接有连接臂,连接臂靠近一端的内壁固定连接有电机c,电机c的输出端通过连接轴与转动连接于连接臂一端的调节板输入端相连接。
14.作为本实用新型在前述方案的基础上进一步优选的:所述调节板的一侧内壁固定连接有连接板,连接板的底部外壁固定连接有连接头。
15.作为本实用新型在前述方案的基础上再进一步优选的:所述连接臂的顶部外壁通过支块连接有管线组件。
16.与现有技术相比,本实用新型提供了一种装配式拖链型生产机器人,具备以下有益效果:
17.1.该装配式拖链型生产机器人,通过设置有前防护板、后防护板和直线铠甲式风琴罩等结构,可将固定基座的四周紧密包围,有效防止加工工件时产生的废屑溅入直线往复式活动部内,保持设备内部干净,设备移动时位移测量组实时检测其距离远离端/靠近端的间距,以便及时控制直线往复式活动部启停,严控控制机器人的位移距离。
18.2.该装配式拖链型生产机器人,利用直线往复式活动部带动移动板前后移动,进而带动其上结构运动,以便灵活调节加工工件的位置;通过设置限位轨以提高移动板作直线往复运动时的稳定性,防止移动板移动时发生转动、不稳现象。
19.3.该装配式拖链型生产机器人,启动电机a调整传动臂及其上结构的旋转角度,以控制外部机构对加工工件的远近;通过调整连接臂及其上结构的翻转角度,以控制外部机构的使用高度;然后启动电机c调整调节板的转动角度,以便灵活调整连接头连接的外部加工机构使用角度,便于外部机构进行多方位加工工件。
附图说明
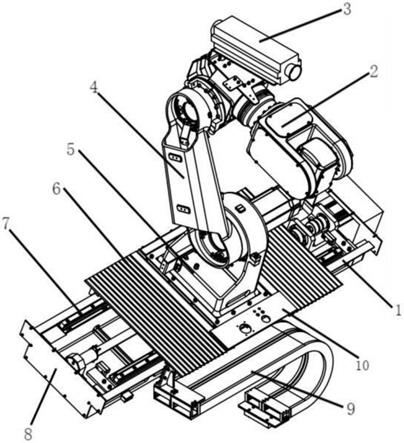
20.图1为本实用新型提出的一种装配式拖链型生产机器人的整体结构示意图;
21.图2为本实用新型提出的一种装配式拖链型生产机器人的前视结构示意图;
22.图3为本实用新型提出的一种装配式拖链型生产机器人的俯视结构示意图;
23.图4为本实用新型提出的一种装配式拖链型生产机器人的侧视结构示意图;
24.图5为本实用新型提出的一种装配式拖链型生产机器人的连接头仰视结构示意图;
25.图6为本实用新型提出的一种装配式拖链型生产机器人的电路流程示意图。
26.图中:1-安装座、2-调节头、3-管线组件、4-传动臂、5-固定基座、6-直线铠甲式风琴罩、7-限位轨、8-轴边板、9-拖链组件、10-前防护板、11-底座、12-电机a、13-连接头、14-位移测量组、15-支撑板、16-连接板、17-电机b、18-后防护板、19-转动柱、20-连接臂、22-拖链一、23-拖链二。
具体实施方式
27.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
28.在本实用新型的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
29.实施例1
30.一种装配式拖链型生产机器人,为了保持设备内部干净,如图1-4和图6所示,包括固定连接于底座11顶部外壁的安装座1,所述安装座1的顶部外壁通过直线往复式活动部连接有移动板,移动板的两侧外壁分别通过螺栓固定有前防护板10和后防护板18,移动板的另外两侧外壁均通过螺栓固定有直线铠甲式风琴罩6;所述移动板的一侧外壁通过螺栓固定有位移测量组14,位移测量组14为测距传感器、标记尺等中的一种,为了严格控制生产时机器人的位置,节省人力,优选的,本实施例中位移测量组14为测距传感器,以保证工件加工质量;所述移动板的顶部外壁通过螺栓固定有固定基座5。将机器人组件安装于固定基座5上,使用时,利用直线往复式活动部带动移动板前后移动,进而带动其上结构运动,移动时位移测量组14实时检测其距离远离端/靠近端的间距,以便及时控制直线往复式活动部启停,严控控制机器人的位移距离;通过设置前防护板10、后防护板18和直线铠甲式风琴罩6,将固定基座5的四周紧密包围,有效防止加工工件时产生的废屑溅入直线往复式活动部内,保持设备内部干净。
31.为了调节加工工件的位置,如图1和图3、图6所示,所述安装座1的两端均通过螺栓固定有轴边板8,对移动板的移动距离作出限制;所述直线往复式活动部包括转动柱19和电机b17,所述转动柱19的一端转动连接于轴边板8的一侧外壁,转动柱19的外壁通过螺纹与移动板的内壁相连接;所述电机b17的底部外壁通过螺栓固定于安装座1的顶部外壁,电机b17的开关控制端与控制模块电性连接,且电机b17的输出端通过传动轴与转动柱19的另一端相连接;所述安装座1靠近两侧的顶部外壁开设有限位轨7,以提高移动板作直线往复运动时的稳定性,防止移动板移动时发生转动、不稳现象。启动电机c17带动转动柱19转动,进而使得移动板及其上机构作前后直线式运动,以便灵活调节加工工件的位置。
32.为了便于防护管线,如图1-4所示,所述安装座1的一侧外壁通过螺栓固定有拖链组件9,拖链组件9的底部外壁通过螺栓固定有支撑板15,避免拖链组件9直接搭载在设备或地面上,拖链组件9由拖链一22和拖链二23构成。将本体侧管线或工具侧管线依次从拖链一22和拖链二23一端口深入,然后从另一端引出后连接在机器人上,使其与机器人整体构成隐藏式连接关系,对管线进行牵引和保护作用。
33.工作原理:将机器人组件安装于固定基座5上,将本体侧管线或工具侧管线依次从拖链一22和拖链二23一端口深入,然后从另一端引出后连接在机器人上;使用时,启动电机c17带动转动柱19转动,进而使得移动板及其上机构作前后直线式运动,进而带动其上结构运动,移动时位移测量组14实时检测其距离远离端/靠近端的间距,以便及时控制直线往复式活动部启停,严控控制机器人的位移距离;通过设置前防护板10、后防护板18和直线铠甲式风琴罩6,将固定基座5的四周紧密包围,有效防止加工工件时产生的废屑溅入直线往复式活动部内。
34.实施例2
35.一种装配式拖链型生产机器人,为了便于外部机构进行多方位加工工件,如图1-5
所示,本实施例在实施例1的基础上作出以下改进:所述固定基座5的一侧外壁通过支板连接有电机a12,固定基座5的另一侧外壁通过转轴转动连接有传动臂4,电机a12的输出端通过联轴器与传动臂4的输入端相连接;所述传动臂4靠近一端的一侧外壁通过转轴转动连接有连接臂20,连接臂20靠近一端的内壁通过螺栓固定有电机c,电机c的输出端通过连接轴与转动连接于连接臂20一端的调节板2输入端相连接;所述调节板2的一侧内壁通过螺栓固定有连接板16,连接板16的底部外壁通过螺栓固定有连接头13;所述连接臂20的顶部外壁通过支块连接有管线组件3,多余管线可隐藏在管线组件3内。根据实际加工需求,首先在连接头13底端利用螺栓组装磨头、钻机、铣平面等工具,使用时,启动电机a12调整传动臂4及其上结构的旋转角度,以控制外部机构对加工工件的远近;通过调整连接臂20及其上结构的翻转角度,以控制外部机构的使用高度;然后启动电机c调整调节板2的转动角度,以便灵活调整连接头13连接的外部加工机构使用角度,便于外部机构进行多方位加工工件。
36.工作原理:根据实际加工需求,首先在连接头13底端利用螺栓组装磨头、钻机、铣平面等工具,使用时,启动电机a12调整传动臂4及其上结构的旋转角度,以控制外部机构对加工工件的远近;通过调整连接臂20及其上结构的翻转角度,以控制外部机构的使用高度;然后启动电机c调整调节板2的转动角度,以便灵活调整连接头13连接的外部加工机构使用角度,便于外部机构进行多方位加工工件。
37.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。