1.本发明涉及机械臂技术领域,尤其涉及一种基于视觉识别操控的机械臂。
背景技术:
2.机械臂是指高精度,多输入多输出、高度非线性、强耦合的复杂系统。因其独特的操作灵活性,已在工业装配、安全防爆等领域得到广泛应用。
3.机械臂是一个复杂系统,存在着参数摄动、外界干扰及未建模动态等不确定性。因而机械臂的建模模型也存在则不确定性,对于不同的任务,需要规划机械臂关节空间的运动轨迹,从而级联构成末端位姿。
4.中国专利申请号为201911025384.1的发明专利公开了一种机械臂,用于对工件进行转移,机械臂包括:主体部分,主体部分绕预定轴线可旋转地设置,主体部分具有第一工作位置和第二工作位置;固定部分,固定部分安装在主体部分上,固定部分用于与工件配合,以将工件固定在主体部分上,限位部分,限位部分包括第一限位件和第二限位件,第一限位件设置在主体部分上,第二限位件与主体部分间隔设置;其中,当主体部分处于第一工作位置时,第一限位件与第二限位件配合,以将主体部分限位在第一工作位置;或者,当主体部分处于第二工作位置时,第一限位件与第二限位件配合,以将主体部分限位在第二工作位置。该发明的机械臂解决了现有技术中的机械臂对工件旋转角度控制不精确的问题。但是在实际工作过程中,其所满足的工作场景有限,例如医药箱中药品的抓取或者不同种类精密电子按需抓取,或者是电梯内机器人需要夹取物品并自动按压电梯按键等,就需要针对机械臂进行改良创新,使其具备智能化,能够精确识别待抓取物品并对按键进行按压,做到自动化抓取物品并且可以对操作按键进行自动按压。
技术实现要素:
5.因此,针对上述的问题,本发明提出一种基于视觉识别操控的机械臂,解决传统机械臂视觉识别方面的缺失,智能化水平偏低的技术问题。
6.为实现上述目的,本发明采用了以下技术方案:一种基于视觉识别操控的机械臂,用于对工件进行预先识别并准确抓取以及对操作按钮的按压,包括基座、设置于所述基座上的支撑结构和设置于所述支撑结构自由端上的夹持机构,所述支撑结构连接所述基座和所述夹持机构;
7.所述基座的下表面边缘设置有稳固脚,所述基座上表面中心位置设置有旋转座,所述旋转座可以在所述基座上360
°
水平旋转;
8.所述支撑结构包括支撑臂和弯折臂,所述支撑臂固定设置于所述旋转座上,所述弯折臂与所述支撑臂可转动连接;
9.所述夹持机构包括支撑架、固定设置于支撑架两端的底座和顶座,穿设于所述底座和所述顶座的螺旋推杆、设置于所述螺旋杆上的滑动块,所述支撑架与所述支撑臂相连接,所述滑动块在所述支撑架内通过所述螺旋推杆在底座与顶座之间进行往复运动,所述
滑动块上对称铰接有两块第一连接板,所述顶座两端设置有第二连接板,所述第二连接板中心位置与所述顶座铰接,所述第二连接板一端与所述第一连接板铰接,另一端铰接设置有夹持板,所述顶座上铰接设置有第三连接板,所述第三连接板与所述夹持板铰接,所述顶座上设置有可转动的双目视觉传感器,所述夹持板末端设置有用于检测按压力度大小的压力传感器。
10.进一步的,所述第二连接板包括相互对称且平行的侧板和连接两侧板的底板,所述侧板为等腰三角形结构,两底角分别与所述夹持板跟所述第一连接板铰接。
11.进一步的,所述夹持板的夹持面始终保持平行,所述夹持板的夹持面上设置有缓冲层。
12.进一步的,所述缓冲层表面为波浪形或者锯齿形,所述缓冲层为橡胶材质或者海绵材质或者棉布材质。
13.进一步的,所述夹持板的自由端末端设置经过倒圆的过渡处理。
14.进一步的,所述支撑臂为伸缩杆结构,包括同轴设置的内管跟外管,所述外管固定设置于所述旋转座上,所述内管的外侧壁上设置有多个由电机驱动的滑动轮,所述外管的内侧壁上设置有与滑动轮相配合的滑动轨道。
15.进一步的,一种如权利要求1所述的基于视觉识别操控的机械臂的使用方法,其特征在于,包括如下步骤:
16.1)螺旋推杆带动滑动块向顶座移动,同时带动第一连接板与第二连接板使夹持板主动张开,第三连接板保持夹持板的稳定;
17.2)设置于顶座上的可转动的双目视觉传感器开始工作,对周围物体进行扫描识别,并将数据传输至电脑进行智能分析;
18.3)电脑对双目视觉传感器所采集的数据进行分析得出待拾取物位置信息后形成指令反馈给机械臂;
19.4)机械臂通过旋转座进行水平面的360
°
旋转,通过支撑臂上伸缩杆结构进行上下移动,通过可转动的支撑臂将夹持板移动到待拾取物或者待按压按钮周围;
20.5)滑动块向底座移动,同时带动第一连接板与第二连接板使夹持板向内夹紧对待拾取物进行夹持或者对按钮进行按压,第三连接板保持夹持过程中夹持板的稳定,若是进行按钮按压工作,则是压力传感器接触按钮并通过预设值控制其按压力度避免过度按压损坏按键;
21.6)机械臂通过原先预设路径退回初始位置后再将待拾取物运输至指定位置,若进行按键按压,则退回初始位置后静止。
22.通过采用前述技术方案,本发明的有益效果是:
23.1、基座用于使机械臂整体结构稳定,同时为机械臂工作过程中提供支撑;基座底部设置有稳固脚,稳固脚采用圆盘状,能够提升稳固性,同时材质可以采用柔性材质如橡胶等,实现了像吸盘一样与地面稳固连接;基座上设置有旋转座,旋转座可以在基座上360
°
水平旋转,满足了使用需求;支撑结构包括支撑臂和弯折臂,支撑臂能够与基座上的旋转座稳定连接,弯折臂能够使机械臂更加灵活;夹持机构包括支撑架、固定设置于所述支撑架两端的底座和顶座,底座和顶座与支撑架相互配合,保证了支撑架整体的结构稳定;所述滑动块在所述支撑架内通过所述螺旋推杆在底座与顶座之间进行往复运动,所述滑动块上对称铰
接有两块第一连接板,所述顶座两端设置有第二连接板,所述第二连接板中心位置与所述顶座铰接,所述第二连接板一端与所述第一连接板铰接,另一端铰接设置有夹持板,所述顶座上铰接设置有第三连接板,所述第三连接板与所述夹持板铰接,通过滑动块的移动进而带动第一连接板与第二连接板进行运动,从而控制夹持板的夹紧与松开,第三连接板一端与顶座相互铰接,另一端与夹持板相互铰接,为夹持板在工作过程中提供稳定性;通过在顶座上设置有可转动的双目视觉传感器,能够在机械臂工作过程中预先对周围环境进行拍摄扫描,进而确定待拾取物的位置及拾取的工作路径,满足精准拾取的工作需求,同时位于夹持板的末端设置有压力传感器,能够在进行按键按压作业时通过电脑预先设定的压力值去控制夹持板按压按键时的力度,避免过度按压造成按键损坏。
24.2、第二连接板包括相互对称且平行的侧板和连接两侧板的底板,所述侧板为等腰三角形结构,两底角分别与所述夹持板跟所述第一连接板铰接,底板的设置目的是为两个侧板提供支撑,侧板设置为等腰三角形结构,三角形具有强稳定性,将铰接部设置在三角形的三个边角处,充分利用了三角形的强稳定的优点,提升夹持机构的工作稳定性。
25.3、夹持板的夹持面始终保持平行,所述夹持板的夹持面上设置有缓冲层,始终保持平行的两个夹持板能够保证在工作过程中与待拾取物件接触面积的最大化,通过在夹持板的夹持面上设置有缓冲层,能够同时对夹持板和待拾取物件进行隔断保护,保护了待拾取物件表面不受损伤,同时也能延长夹持板的使用寿命。
26.4、缓冲层表面为波浪形或者锯齿形,所述缓冲层为橡胶材质或者海绵材质或者棉布材质,采用波浪形或者锯齿形,提升夹持性能;缓冲材质采用海绵材质或者棉布材质,二者均属于优质的柔性材料,且材料成本较低,易于更换。
27.5、夹持板的自由端末端设置经过倒圆的过渡处理,目的是防止在工作过程中的意外情况发生,经过倒圆处理后能够防止意外情况发生时机械臂不会对操作工人造成伤害。
28.6、所述支撑臂为伸缩杆结构,包括同轴设置的内管跟外管,所述外管固定设置于所述旋转座上,所述内管的外侧壁上设置有多个由电机驱动的滑动轮,所述外管的内侧壁上设置有数量与滑动轮相对应的滑动轨道;可伸缩的支撑臂能够满足更多的使用场景,通过设置由电机驱动的滑动轮跟滑动轨道,保证伸缩杆上下移动时更加平稳。
29.7、通过可转动的双目视觉传感器预先对机械臂周边环境进行拍摄识别,避免机械臂工作过程中与周边可能存在的障碍物发生干涉碰撞,同时摄像头能够对待拾取物件的位置距离进行精确识别,进而反馈回电脑进行处理,而后通过电脑进行分析规划出合理路径,反馈给机械臂,类似地图导航一样,做到精准高效的夹取作业。
30.8、针对机械臂对按钮进行按压的工作中,可以通过双目视觉传感器预先判断距离,进而机械臂开始工作不断逼近按钮,然后通过夹持板的末端对按钮进行触摸,做到精准高效。
附图说明
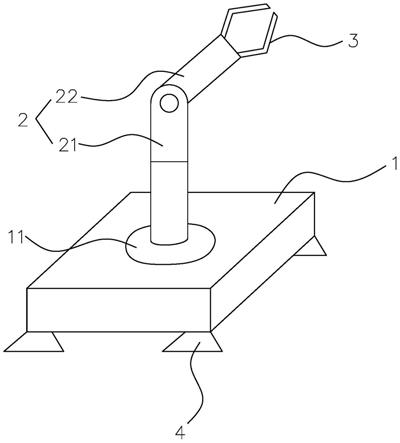
31.图1是本发明整体结构简化示意图;
32.图2是本发明支撑臂内部结构示意图;
33.图3是本发明夹持机构结构示意图;
34.图4是本发明夹持机构正面结构示意图;
35.图5是本发明夹持机构夹紧和张开示意图;
36.图6是本发明第二连接板立体结构示意图。
具体实施方式
37.现结合附图和具体实施方式对本发明进一步说明。
38.参考图1至图6,本实施例一提出一种基于视觉识别操控的机械臂,用于对工件进行预先识别并准确抓取,包括基座1、设置于所述基座1上的支撑结构2和设置于所述支撑结构2自由端上的夹持机构3;
39.所述支撑结构2连接所述基座1和所述夹持机构3,所述基座1的下表面边缘设置有稳固脚4,所述基座1上表面中心位置设置有旋转座11,所述旋转座11可以在所述基座1上360
°
水平旋转,所述支撑结构2包括支撑臂21和弯折臂22,所述支撑臂21固定设置于所述旋转座11上,所述弯折臂22与所述支撑臂21可转动连接;
40.所述夹持机构3包括支撑架31、固定设置于支撑架31两端的底座32和顶座33,穿设于所述底座32和所述顶座33的螺旋推杆34、设置于所述螺旋杆34上的滑动块35,所述支撑架31与所述支撑臂21相连接,所述滑动块35在所述支撑架31内通过所述螺旋推杆34在底座32与顶座33之间进行往复运动,所述滑动块35上对称铰接有两块第一连接板36,所述顶座33两端设置有第二连接板37,所述第二连接板37中心位置与所述顶座33铰接,所述第二连接板37一端与所述第一连接板36铰接,另一端铰接设置有夹持板39,所述顶座33上铰接设置有第三连接板38,所述第三连接板38与所述夹持板39铰接,所述顶座33上设置有可转动的双目视觉传感器5,所述第二连接板37包括相互对称且平行的侧板372和连接两侧板372的底板371,所述侧板372为等腰三角形结构,两底角分别与所述夹持板39跟所述第一连接板36铰接;
41.所述夹持板39末端设置有用于检测按压力度大小的压力传感器6,所述压力传感器6采用压电式压力传感器。
42.所述夹持板39的夹持面始终保持平行,所述夹持板的夹持面上设置有缓冲层391,所述缓冲层391表面为锯齿形,所述缓冲层391为橡胶材质,所述夹持板39的自由端末端设置经过倒圆的过渡处理,所述支撑臂21为伸缩杆结构,包括同轴设置的内管211跟外管212,所述外管212固定设置于所述旋转座11上,所述内管211的外侧壁上设置有多个由电机驱动的滑动轮213,所述外管212的内侧壁上设置有与滑动轮213相配合的滑动轨道214。
43.上述缓冲层391表面还可以设置为波浪形,且材质可以替换为其他柔性材质,如海绵材质或者棉布材质,上述稳固脚4采用圆盘式的支脚,可采用刚性材质也可采用柔性材质,模仿吸盘牢固吸附在地面上,保证机械臂在工作过程中不会发生滑移,上述压力传感器6还可以采用机械电子领域内其他公知的压力传感器,如半导体应变片压力传感器、压阻式压力传感器、电容式压电传感器或者光纤压力传感器。
44.本发明的工作方式为:
45.1)螺旋推杆34带动滑动块向顶座移动,同时带动第一连接板36与第二连接板37使夹持板39主动张开,第三连接板38保持夹持板的稳定;
46.2)设置于顶座33上的可转动的双目视觉传感器5开始工作,对周围物体进行扫描识别,并将数据传输至电脑进行智能分析;
47.3)电脑对双目视觉传感器5所采集的数据进行分析得出待拾取物位置信息后形成指令反馈给机械臂;
48.4)机械臂通过旋转座11进行水平面的360
°
旋转,通过支撑臂21上伸缩杆结构进行上下移动,通过可转动的支撑臂21将夹持板39移动到待拾取物或者待按压按钮周围;
49.5)滑动块35向底座32移动,同时带动第一连接板36与第二连接板37使夹持板39向内夹紧对待拾取物进行夹持或者对按钮进行按压,第三连接板38保持夹持过程中夹持板的稳定,若是进行按钮按压工作,则是压力传感器6接触按钮并通过预设值控制其按压力度避免过度按压损坏按键;
50.6)机械臂通过原先预设路径退回初始位置后再将待拾取物运输至指定位置,若进行按键按压,则退回初始位置后静止。
51.本发明可应用于电梯按键的自动按压场景,具体工作方式为:
52.a)通过机械臂上的双目视觉传感器5识别环境中的文字按键进而反馈至中心电脑,电脑针对采集的图像进行分析并判断出距离及路径等信息反馈给机械臂;
53.b)机械臂开始工作,不断按照规定路径靠近电梯按键,然后通过夹持板39末端触摸按键,点亮,再通过双目视觉传感器5识别电梯开门;
54.c)设备进入电梯后机械臂重复a)、b)步骤进行相应楼层按键的触摸。
55.上述双目视觉传感器5为公知设备,其工作原理是先对目标物体进行识别跟距离测量,可采用oak生产的型号为sj2088poe的双目视觉传感器。
56.尽管结合优选实施方案具体展示和介绍了本发明,但所属领域的技术人员应该明白,在不脱离所附权利要求书所限定的本发明的精神和范围内,在形式上和细节上可以对本发明做出各种变化,均为本发明的保护范围。