1.本发明属于外骨骼机器人领域,特别涉及一种三级限位支撑的被动式可穿戴下肢外骨骼机器人。
背景技术:
2.被动式下肢工业外骨骼机器人是一种能够辅助并增强人体机能的穿戴式特种机器人,在工业生产领域,存在大量快节奏、高重复、易疲劳以及无法实现自动化的人工作业环节,特别是特种焊接、打磨、零部件装配等工序,工人往往需要以高疲劳且难以长时间保持的身体姿势去操纵工具,其肌肉骨骼会受到来自人体自重以及外部的机械压力和振动冲击,极易对工人腿部关节造成疲劳损伤,从而诱发肌肉骨骼系统疾病(wmsds),影响技工人员的工作效率、产品质量以及职业寿命。
3.面向需要频繁或持续长久蹲坐(人体膝关节持续受力)作业工况,目前实现方式多为液压、电动、气动等驱动下的主动式助力,暂无被动式多级可调型外骨骼机器人。
技术实现要素:
4.本发明所解决的技术问题在于提供一种三级限位支撑的被动式可穿戴下肢外骨骼机器人,以解决上述背景技术中提出的问题。
5.实现本发明目的的技术解决方案为:
6.一种三级限位支撑的被动式可穿戴下肢外骨骼机器人,包括人机固定绑带和用于左下肢、右下肢穿戴的外骨骼;所述外骨骼包括大腿部件、膝关节和小腿部件;所述大腿部件围绕膝关节相对于小腿部件旋转;
7.所述膝关节上端设有多个工作限位面和一个极限限位面的限位结构,每个工作限位面对应于人体的不同工作姿态;所述大腿部件内设有可沿大腿内部上下滑动的姿态调节模块,且所述大腿部件内设有多个工作限位槽和一个极限限位槽;每个工作限位槽对应于一个工作限位面,极限限位槽对应于极限限位面;所述姿态调节模块能够与对应的工作限位槽卡合,实现与对应工作限位面的接触并形成限位角产生支撑力;且所述姿态调节模块能够与工作限位槽分离并卡入极限限位槽,实现与工作限位面的分离并与极限限位槽接触,完成机器人的非工作状态时大腿部件与小腿部件的折叠。
8.本发明与现有技术相比,其显著优点是:
9.本发明可通过手动调节姿态调节模块档位来设定限位位姿角度,限位位姿角度为65
°
、90
°
和115
°
三级可调,人体在下蹲过程中到达所设定的限位位姿角度时,外骨骼姿态调节模块将与其对应的限位面接触,形成限位角,并产生支撑力,减缓穿戴者膝关节软骨磨损,减轻人体疲劳损伤及工作强度,提高人工作业效率及质量。同时,为适应不同穿戴者,保证可穿戴性,外骨骼大腿和小腿部件均为长度可调结构,调节操作快捷、方便。
附图说明
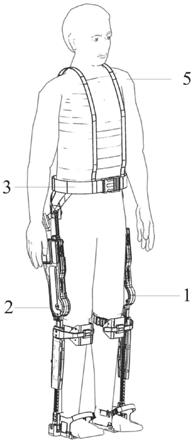
10.图1为外骨骼穿戴效果示意图。
11.图2为外骨骼结构立体图。
12.图3为悬挂机构的连接示意图。
13.图4为悬挂机构的爆炸视图。
14.图5为第一盖板内侧结构示图。
15.图6为大腿长度调节机构结构示意图及包含的爆炸示意图。
16.图7为姿态调节模块与限位结构图。
17.图8为本发明姿态调节模块的爆炸视图。
18.图9(a-b)为本发明第一姿态及对应人体的工作状态示意图。
19.图10(a-b)为本发明第二姿态及对应人体的工作状态示意图。
20.图11(a-b)为本发明第三姿态及对应人体的工作状态示意图。
21.图12为本发明极限姿态的原理示意图。
22.图13为本发明外骨骼单腿结构示意图。
23.图14为本发明小腿长度调节机构视图。
具体实施方式
24.下面结合附图及具体实施例对本发明做进一步的介绍。
25.结合图1-图12,本实施例的一种三级限位支撑的被动式可穿戴下肢外骨骼机器人,包括左下肢外骨骼1、右下肢外骨骼2和人机固定绑带3,所述左下肢外骨骼1与所述右下肢外骨骼2结构相同且对称布置,可通过所述人机固定绑带3穿戴于人体下肢,所述左下肢外骨骼1包括大腿部件11、膝关节12和小腿部件13,所述大腿部件11围绕所述膝关节12相对于所述小腿部件13旋转,所述大腿部件包括大腿壳体111、悬挂机构112、大腿长度调节机构116和姿态调节模块117,所述姿态调节模块117位于所述大腿部件11内部,所述大腿壳体111包括大腿内壳体1111和大腿外壳体1112,两壳体对扣在所述姿态调节模块117外部,所述小腿部件包括上支撑杆131、防护壳体132、下支撑杆133、小腿支撑板134、足部支撑机构135和小腿长度调节机构136,所述上支撑杆131通过所述小腿长度调节机构136与所述下支撑杆133连接,所述小腿支撑板134用于用户穿戴时,通过绑带与用户小腿连接。
26.结合图3-图5,所述悬挂机构112用于与固定绑带3连接,通过大腿长度调节机构连接于大腿部件11上端,具体包括挂扣转盘1122、矩形弹簧1123、滑动连接件1124、由第一盖板1125和第二盖板1126构成的挂扣盖板;
27.所述第一盖板1125与所述第二盖板1126通过销轴固定连接形成挂扣盖板,用于容纳挂扣转盘1122、矩形弹簧1123和滑动连接件1124。所述挂扣转盘1122为二阶圆柱轴,包括一大一小两轴,其小轴11222轴径中心开螺纹孔用于与所述悬挂杆1121连接,其大轴设置在挂扣盖板内。所述第一盖板1125内侧下端设有矩形槽11254,所述第二盖板1126内侧下端设有矩形槽11261,矩形槽11261与矩形槽11254尺寸相同,两矩形槽的空腔容纳矩形弹簧112和滑动连接件1124。滑动连接件1124位于矩形弹簧112上端。所述滑动连接件1124为上端小下端大的二阶矩形轴,侧端设有柱状限位凸起11243,所述第一盖板1125下端设有矩形通槽11251,柱状限位凸起11243穿过矩形通槽11251,能够在矩形通槽11251内上下滑动。所述滑
动连接件1124上端矩形轴与挂扣转盘1122的侧端接触,用于对挂扣转盘1122进行轴向限位。所述第一盖板1125上端设有u型开槽11252,挂扣转盘1122小轴11222穿过u型开槽11252后与悬挂杆1121上端通过螺钉连接。所述第一盖板1125上端内侧设有圆形容纳空腔,用于容纳挂扣转盘1122的大轴,圆形容纳空腔边缘有凸起限位11253,对挂扣转盘1122的大轴进行径向限位。所述第二盖板1126上端内侧设有开口槽,该槽包括位于下侧的圆状开口槽11262和位于上侧的u型开口槽11263,所述圆状开口槽11262直径与所述挂扣转盘1122大轴11221的轴径相同,用于安装挂扣转盘1122。在安装时,将矩形弹簧1123安装在第一盖板1125和第二盖板1126之间的矩形空腔内,再将滑动连接件1124安装在第一盖板1125和第二盖板1126之间的矩形空腔内,下压滑动连接件1124压缩矩形弹簧1123,再将挂扣转盘1122通过圆状开口槽11262和u型开口槽11263,轴向移动安装在第一盖板1125上端圆形容纳空腔,松开滑动连接件1124后,在矩形弹簧1123作用下,滑动连接件1124上移,与挂扣转盘1122的大轴侧端接触,对挂扣转盘1122轴向进行限位,所述固定绑带3连接在挂扣盖板上。通过悬挂机构112可实现固定绑带3与悬挂杆1121的快速安装可拆卸。
28.结合图6,所述大腿长度调节机构116位于大腿壳体111上端,包括悬挂杆1121、固定件外壳1161和连接组件1162;
29.所述悬挂杆1121沿竖直方向上均匀分布多个调节孔,相邻两孔间距14mm,所述悬挂杆1121上端与所述挂扣转盘1122通过螺钉连接,下端与大腿壳体111滑动连接,可相对大腿壳体111山下滑动。所述固定件外壳1161设有两固定销孔,通过固定销11622将固定件外壳1161固定连接至大腿壳体111上,所述连接组件1162包括调节开关11621和扭转弹簧11624,所述调节开关11621上设有卡孔凸台11625用于与所述悬挂杆上的调节孔11211配合,所述调节开关11621与固定件外壳1161之间设有扭转弹簧11624,所述扭转弹簧11624通过定位销轴11623安装在所述固定件外壳1161上,所述扭转弹簧11624使卡孔凸台11625压入悬挂杆上的调节孔11211。通过左右拨动所述调节开关11621可挤压所述扭转弹簧实现卡孔凸台卡入或弹出不同位置的调节孔,同时配合拉动所述悬挂杆1121调节其伸出长度,实现外骨骼大腿长度调节设定。
30.结合图7、图8,所述姿态调节模块117安装在大腿壳体内部,包括限位调节开关1171、按压弹簧1172、姿态调节块1173和限位调节槽1174,
31.所述大腿壳体内设有限位调节槽1174,所述限位调节开关1171、姿态调节块1173可沿限位调节槽1174上下滑动;所述限位调节开关1171左右两侧各有一个限位凸起11711,所述限位调节槽1174左右两侧均间隔的设有三级工作限位槽11741、11742、11743,顶端左右两侧设有极限限位槽11744,限位凸起11711与对应侧的限位槽配合。所述限位调节开关1171内侧中心设有凹孔,用于安装按压弹簧1172,所述姿态调节块1173上端设有柱状凸块11731,下端设有限位挡块11732;所述按压弹簧1172安装在限位调节开关1171的中心凹孔与姿态调节块1173的柱状凸块11731中心凹孔之间,在按压弹簧1172在用下,限位凸起11711与对应侧的限位槽紧密卡合,实现对限位挡块11732位置的锁定。限位凸起11711将卡入限位槽1174相应的工作限位槽11741或11742或11743中,实现姿态调节设定。按压所述限位调节开关1171,挤压按压弹簧1172,使限位凸起11711与对应侧的限位槽分开,限位调节开关1171和姿态调节块1173能够一起在所述限位调节槽1174内滑动,解除限位挡块11732位置的锁定。
32.结合图7,所述膝关节12上端设有限位结构124,外侧设有膝关节壳体121,所述膝关节壳体121设有旋转轴1213,所述大腿壳体111可以围绕所述旋转轴1213转动,所述限位结构124包括4个限位面,分别是工作限位面:一级限位面1241(65
°
限位面,对应人体膝关节为65
°
时的工作姿态)、二级限位面1242(90
°
限位面,对应人体膝关节为90
°
时的工作姿态)、三级限位面1243(115
°
限位面,对应人体膝关节为115
°
时的工作姿态)和极限限位面1244(140
°
限位面,对应外骨骼收纳时的姿态,此时膝关节角度为140
°
),上述限位面的角度为大腿组件与小腿组件之间的夹角。其中,当所述调节开关限位凸起11711卡入工作限位槽11741时,对应设定为65
°
助力档位,此时人体下蹲过程中,若膝关节角度到达所设定的限位位姿角度即65
°
时,外骨骼姿态调节块1173的限位挡块11732与对应的一级限位面1241接触(如图9(a-b)所示),形成限位角,并产生支撑力,其他档位同理,工作限位槽11742对应于二级限位面1242(如图10(a-b)所示),工作限位槽11743对应于三级限位面1243(如图11(a-b)所示)。当限位凸起11711卡入极限限位槽11744,限位挡块11732与对应的极限限位面1244接触(如图12所示),完成机器人的非工作状态的大腿部件与小腿部件的折叠收纳。
33.结合图13,所述小腿部件13与所述膝关节12固定连接,包括上支撑杆131、防护壳体132、下支撑杆133、小腿支撑板134、小腿长度调节机构136以及足部支撑机构135,所述上支撑杆131、下支撑杆133外侧设有防护壳体132;所述上支撑杆131和下支撑杆133上均匀分布有调节孔,相邻两孔间距13mm,下支撑杆133穿入上支撑杆131,并可相对上下滑动;所述足部支撑机构135包括踝关节支撑杆1351和足底踏板1353,所述踝关节支撑杆1351与所述下支撑杆133固定连接,所述踝关节支撑杆1351和足底踏板1353通过球轴承1352连接。
34.结合图14,所述小腿长度调节机构136包括长度调节开关1361、连接件外盖1362、中间连接组件1363、连接件底座1364,所述长度调节开关1361为包含一大一小的二阶圆柱轴结构,其穿过所述连接件外盖1362和中间连接件1363中心孔,通过小轴端的销孔与中间连接件1363用销轴连接,所述连接件外盖1362设有中心孔,内侧两个圆状凸台,凸台上分别套有按压弹簧13632,再通过四个销轴穿过连接件底座1364与小腿防护壳体132连接在一起,所述中间连接件1363设有两个长度调节轴(圆柱状凸起)13631,可通过所述连接件底座1363上的矩形通孔槽13641卡入上支撑杆131和小腿下支撑杆133上的调节孔,当拉起或按下所述长度调节开关1361时,所述中间连接件1363的两个长度调节轴13631从下支撑杆133的调节孔中弹出或卡入,配合同时拉动所述小腿支撑杆133,实现外骨骼小腿长度调节。
35.结合图2,、图10(a),所述人机固定绑带3包括肩部背带31、腰部固定绑带32、髋关节挂带33、臀部承力带34、小腿固定绑带35、足部固定绑带36,分别用于与肩部51,腰部52,髋关节53,臀部54,小腿55,足部56绑定。人体上部的绑带通过悬挂机构112连接,用于实现人体穿戴,所述人机固定绑带3设有尺寸调整划线,能够根据人体尺寸不同,快速调节绑带长度。
36.在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
37.以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽
叙述所有的细节,也不限制该发明仅为所述的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。