1.本发明涉及机器人技术领域,具体涉及一种末端抓手可隐藏的连续体抓取机器人及其控制方法。
背景技术:
2.机器人的经典"取放"策略一般通过末端安装平行爪式抓手来实现,但被抓取物体的形状和大小受到抓手的限制,特别是在有障碍的空间。
3.连续体机器人的主体不包含刚性连杆和转动关节,是一种依靠连续骨架,弯曲成光滑连续曲线的新型仿生机器人。这类机器人的设计灵感来自天然动物的柔顺运动,如象鼻、章鱼臂和蛇等,其设计包含腱驱动连续体机器人、流体驱动机器人以及同心管型的连续体机器人与传统的“刚性”机器人相比,连续体机器人能够在任意部位产生变形,具有灵巧度高、安全性好、非结构化环境适应能力强以及能够操作不同尺寸、形状物体的特点,并且其结构设计可做到比传统机器人更轻小,是对传统关节式机器人应用场景的良好补充。相对于由形状记忆聚合物、导电聚合物为本体材料的软体机器人,连续体机器人具有更高的负载能力和更强的可控性。对于需要穿越狭小障碍空间才能完成的抓取任务,连续体机器人是一种理想的选择。
4.连续体机器人的抓取设计与分析取得了重要进展,这些研究可分为三种类型:(1)缠绕抓取。比如费斯托公司通过象鼻和章鱼启发设计的bionic handling assistant和bionic motion robot以及蜂窝气动网格机械手;它们具有良好的适应能力,可以轻松实现对易碎物体或不规则形状物体的抓取与移动,这对于传统刚性机器人是困难的;然而由于弯曲曲率的限制,相对于自身小尺寸物体的抓取对于上述机器人是难以实现的。(2)与末端执行器配合抓取。除了本体可以作为执行器完成缠绕抓取操作,连续体机器人还可以像传统机器人一样通过与末端效应器配合来抓取物体。耿世能等在腱驱动机器人末端加装了直线电机驱动的爪钳用于小尺寸物体的抓取,但刚性元件构成的末端爪钳及其驱动不仅增加了负载压力而且限制了机器人在非结构化空间内的操作灵活性。jessica在用于鼻内颅底手术同心管型连续体机器人的末端装配了柔性夹爪,并将夹爪驱动线通过同心管操纵器的最内层管插入,实现了轻量化设计;然而,仅有导向功能的同心管连续臂不能实现物体的抓取,其操作目标集同样受到末端夹爪的限制。(3)多指协作抓取。该类机器人模拟人手的操作通过多指配合抓取物体,比如:美国国家生物开发局的液压软机器人爪,通过控制其的内部压力可以在深海中灵活地捕获和检测;其多个手指存在于机器人末端,不利于小型化和集成化设计,限制了它在狭小非结构化空间的应用。
技术实现要素:
5.为了实现抓取机器人的灵活性、通用性和轻量化,本发明提出了一种末端抓手可隐藏的连续体抓取机器人及其控制方法。
6.本发明的一个目的在于提出一种末端抓手可隐藏的连续体抓取机器人。
7.本发明的末端抓手可隐藏的连续体抓取机器人包括:末端柔性抓手、连续体操纵器、柔性臂、驱动台、驱动控制箱以及上位机;其中,末端柔性抓手、连续体操纵器和柔性臂依次连接为一个整体,末端柔性抓手和连续体操纵器分别连接至驱动台;驱动台通过电缆连接至驱动控制箱;驱动控制箱通过电缆连接至上位机;
8.末端柔性抓手包括:弹性爪指、弹性爪掌、爪指驱动线和爪指解耦套管;弹性爪指包括两组弹性片,每一组弹性片为由一片超弹性金属片构成的对称的形状,包括连接为一体的u型底部、指臂和指端,u型底部的两个末端分别连接指臂,指臂与u型底部的末端具有倾斜角,夹角为90~170
°
,在指臂的末端连接指端,指端与指臂之间具有向内的夹角,夹角为30~150
°
;弹性爪掌为可弯曲的柱状体,柱状体的中心轴沿z轴,在柱状体上开设有贯穿侧壁且通过中心轴的两个互相垂直的限位孔,限位孔的轴线分别平行于x轴和y轴,并在z轴上具有高度差;弹性爪指中的每一组弹性片分别对应一个限位孔,弹性片的一端穿过对应的限位孔,弹性片的指臂和指端露出弹性爪掌的末端,并使得u型底部位于限位孔中,从而实现弹性爪指通过u型底部安装在弹性爪掌上,并且两组弹性片正交布置,两组弹性爪指的u形底部与弹性爪掌上的两个限位孔采用间隙配合,即弹性爪指与弹性爪掌之间能绕限位孔的轴向发生相对转动,以此提升弹性爪指对不同形状目标抓取的自适应能力;弹性爪掌的底端连接爪指驱动线,爪指驱动线连接至驱动台;在爪指驱动线外包覆有爪指解耦套管,爪指解耦套管为与驱动线间隙配合的同心管套,爪指解耦套管的内径小于弹性爪掌的外径,以实现机械限位;
9.连续体操纵器包括:柔性骨架、n级驱动单元和软壳;柔性骨架包括披覆层和螺旋支撑弹簧,螺旋支撑弹簧的内部中空,在螺旋支撑弹簧的外部包覆披覆层,从而形成内部中空的柔性骨架,能够实现弯曲和周转运动且轴向不能够拉伸与压缩,中心轴位于z轴;螺旋支撑弹簧的末端为漏斗状;n为≥2的整数;弹性爪掌位于螺旋支撑弹簧内的末端,爪指解耦套管穿过螺旋支撑弹簧的内部,且爪指解耦套管的末端与螺旋支撑弹簧的末端具有高度差,高度差不小于弹性爪掌与弹性爪指闭合时的长度和,使得爪指解耦套管的末端留有弹性爪指缩回螺旋支撑弹簧所需的高度差;
10.每一级驱动单元包括:末端导线盘、多个中间导线盘、基部导线盘、连续体操纵器驱动线和连续体操纵器解耦套管;末端导线盘、多个中间导线盘和基部导线盘分别为平行于xy平面的形状相同的环状的圆盘,从末端到底端依次套在该级驱动单元对应的柔性骨架外,且圆盘的内壁与柔性骨架的外壁固连;在每一个中间导线盘和基部导线盘相对应的位置均开设有三个呈中心对称的导线孔和三个呈中心对称的弧形解耦套管过线孔;在每一根连续体操纵器驱动线的末端固定在末端导线盘的底面,然后依次穿过各个中间导线盘和基部导线盘相应的导线孔,并从基部导线盘的底面穿出;在连续体操纵器驱动线穿出本级的基部导线盘的部分外包有连续体操纵器解耦套管,三根连续体操纵器解耦套管的末端固定在本级的基部导线盘的底面;前一级的三根连续体操纵器解耦套管依次通过以后各级弧形解耦套管过线孔,并从最后一级的基部导线盘的底面穿出;爪指解耦套管的底端从最后一级驱动单元的基部导线盘的底面伸出;
11.多级驱动单元从末端朝底端依次串联套在柔性骨架外,后一级驱动单元的末端导线盘与前一级驱动单元的基部导线盘为同一导线盘;后一级驱动单元的导线孔与前一级驱动单元的导线孔角度错位(5
°‑
115
°
);爪指解耦套管和各级驱动单元的连续体操纵器解耦
套管在穿过最后一级驱动单元的基部导线盘的下表面后合束;软壳套在末端导线盘、多个中间导线盘和基部导线盘外,软壳的内壁与末端导线盘、多个中间导线盘和基部导线盘的外边缘固连,形成连续体操纵器的外表面;柔性臂为内部中空的柔性管,采用柔性材料;柔性臂套在合束后的爪指解耦套管和3n根连续体操纵器解耦套管外;
12.驱动台包括上支撑板、下支撑板、侧壁、分线支架、电机固定架、直线套管、阶梯轴、直线电机、爪指力传感器、连续体操纵器力传感器和n组直线推杆;位于水平面的上支撑板和下支撑板相对,二者之间通过侧壁固定连接,在上支撑板的上表面和下表面分别设置分线支架和电机固定架;柔性臂的末端与分线支架的上表面固连,爪指解耦套管和三根连续体操纵器解耦套管在穿过分线支架后离束;在上支撑板上固定直线套管,直线套管为内部中空的刚性导管,爪指解耦套管的底端固连直线套管的末端,爪指驱动线伸入直线套管内连接至阶梯轴的末端,阶梯轴的末端位于直线套管内;阶梯轴的底端连接至直线电机,在阶梯轴的底端与直线电机之间设置爪指力传感器;直线电机放置在电机固定架内,直线电机沿z轴运动;与n级驱动单元相对应,在上支撑板上开设有n组通孔,并且在下支撑板的上表面安装有n组直线推杆;与每一级驱动单元相对应,每一组通孔包括三个通孔,并且每一组直线推杆包括三根直线推杆;每一级驱动单元的三根连续体操纵器解耦套的底端分别对应着相应的通孔固连在上支撑板的上表面,每一级驱动单元的三根连续体操纵器驱动线的底端穿过相应的通孔,连接至对应的直线推杆;在每一根连续体操纵器驱动线与相应的直线推杆之间设置连续体操纵器力传感器;
13.驱动控制箱包括电机驱动器、推杆驱动器和电源;其中,电源分别连接至电机驱动器和推杆驱动器,提供工作电压;驱动台的直线电机通过电缆连接至电机驱动器;与n组直线推杆相对应,具有n组推杆驱动器,每一组推杆驱动器包括三个推杆驱动器,每一根直线推杆通过电缆分别连接至对应的推杆驱动器;电机驱动器和每个推杆驱动器分别连接至上位机;
14.根据物体的大小,分为两种方式抓取物体,对于尺寸较小的物体采用末端柔性抓手捏取,对于尺寸较大的物体采用连续体操纵器卷取,末端柔性抓手捏取和连续体操纵器形成互补优势:
15.捏取尺寸较小的物体:1)捏取操作前:连续体操纵器处于未变形的直线状态,弹性爪指为无变形的张开状态;2)姿态调整过程:连续体操纵器将末端柔性抓手从当前位置移动至物体所在的位置周围,并且弹性爪指的指端位于物体的周围且指臂覆盖物体的一个表面;上位机通过连续体操纵器的笛卡尔空间轨迹规划生成姿态调整过程中连续体操纵器的n级驱动单元对应的3n个直线推杆的运动控制曲线;上位机将所得的运动控制曲线发送给驱动控制箱,驱动控制箱依照接收的运动控制曲线独立驱动连续体操纵器的n级驱动单元对应的3n个直线推杆,每个直线推杆驱动与之固连的连续体操纵器驱动线,在直线推杆的驱动拉力和连续体操纵器的弹性恢复力作用下,连续体操纵器驱动线始终处于拉紧状态,通过协调控制3n根连续体操纵器驱动线的长度,控制连续体操纵器的末端的位姿,带动末端柔性爪手达到抓取物体的位置;3)抓取物体:上位机将抓取物体指令发送至驱动控制箱,驱动控制箱控制直线电机通过阶梯轴拉动爪指驱动线带动弹性爪掌往下沿z轴负方向驱动,从而带动弹性爪指的底部朝柔性骨架的螺旋支撑弹簧内移动,弹性爪指的指臂在螺旋支撑弹簧的末端内边缘接触点处受到位置约束,弹性爪指发生弹性形变发生闭合运动;当
弹性爪指的指端与物体接触后,弹性爪指的闭合运动受阻,直线电机持续驱动,爪指驱动线上的拉力逐渐增大,使得弹性爪指的指端紧紧抓住物体的表面,爪指力传感器感知直线电机对阶梯轴的拉力达到捏取阈值后,直线电机进入自锁状态,弹性爪指停止运动,实现采用捏取的方式抓取物体,弹性爪指对物体捏紧力的大小与捏取阈值的大小正相关;4)移动物体:柔性抓手保持捏紧物体,连续体操纵器将末端柔性抓手移至物体的释放位置;上位机再次通过连续体操纵器的笛卡尔空间轨迹规划生成此过程连续体操纵器的n级驱动单元对应的3n个直线推杆的运动控制曲线;并将所得的运动控制曲线发送给驱动控制箱,驱动控制箱依照接收运动控制曲线分别独立驱动连续体操纵器的n级驱动单元对应的3n个直线推杆,每个直线推杆驱动与之固连的连续体操纵器驱动线,在直线推杆的驱动拉力和连续体操纵器的弹性恢复力作用下,连续体操纵器驱动线始终处于拉紧状态,通过协调控制3n根连续体操纵器驱动线的长度,控制连续体操纵器的末端将捏有物体的末端柔性抓手移至释放物体的位置;之后连续体操纵器的n级驱动单元对应的3n个直线推杆进入自锁状态,连续体操纵器停止运动;5)释放物体:弹性变形后的弹性爪指与螺旋支撑弹簧的末端内边缘接触后,在恢复力的作用下,弹性爪指有向外的运动趋势,使得弹性爪指在很小的推力下即能够完成张开动作;上位机将释放物体指令发送至驱动控制箱,驱动控制箱控制直线电机通过阶梯轴推动爪指驱动线往上沿z轴正方向驱动,在弹性恢复力的作用下弹性爪指发生张开运动,回到初始的张开状态,实现释放物体;当阶梯轴的限位轴肩与直线套管的底端接触后,在直线电机的持续推动下,对阶梯轴的推力增加,当爪指力传感器感知直线电机对阶梯轴的推力达到推力阈值后,直线电机停止驱动并进入自锁状态,末端弹性爪指恢复到初始的张开状态并停止运动;从而末端柔性抓手仅靠直线电机驱动爪指驱动线的轴向运动实现对物体的捏取和放开的操作,即末端柔性抓手采用欠驱动方式,仅通过一根爪指驱动线的轴向运动控制末端的四个指臂和指端的张开与闭合;同时,螺旋支撑弹簧的末端为漏斗状,使得弹性爪指的伸出操作更顺利;直线套管将柔性的爪指驱动线与刚性的阶梯轴的固连点限制在狭小的直线套管内运动,以避免非直线状态的爪指解耦套管对刚性的阶梯轴的直线运动产生阻碍;阶梯轴限制爪指驱动线沿z轴正方向运动的上限;在狭小的非结构化空间中操作时,直线电机通过阶梯轴拉动爪指驱动线带动弹性爪掌往下沿z轴负方向驱动,弹性爪指完全缩回至柔性骨架的螺旋支撑弹簧内中,一方面对弹性爪指起到保护作用,另一方面减小抓取机器人的体积,使其更容易穿过复杂的非结构化的狭小通道;
16.卷取尺寸较大的物体:1)卷取操作前:连续体操纵器处于未变形的直线状态,弹性爪指为无变形的张开状态;2)划分n级驱动单元:根据抓取的物体的特点,将n级驱动单元划分为串联的卷取组和操控组,卷取组位于末端,操控组位于底端,卷取组包括m1级驱动单元,操控组包括m2级驱动单元,m1+m2=n,为实现稳定的卷取物体,m1≥1且卷取组的m1级驱动单元串联长度不小于卷取组包绕在物体外表面形成力闭合或形闭合的最小包绕长度;为实现引导卷曲组在笛卡尔空间内灵活移动,m2≥3;3)姿态调整过程:上位机通过驱动控制箱控制直线电机通过阶梯轴拉动爪指驱动线带动弹性爪掌往下沿z轴负方向驱动,从而带动弹性爪指的底部向柔性骨架的螺旋支撑弹簧内运动,弹性爪掌的底端与柔性抓手解耦套管的末端接触后,弹性爪掌往下沿z轴负方向的运动受阻,在直线电机持续驱动下,爪指驱动线上的拉力逐渐增大,爪指力传感器感知直线电机对阶梯轴的拉力达到收缩阈值后,直线电机进入自锁状态,弹性爪指完全缩入柔性骨架并停止运动;然后,通过操控组将卷取组从
当前位置移动至物体所在的位置周围,并且卷取组位于物体的周围且覆盖物体的上表面,上位机通过连续体操纵器的笛卡尔空间轨迹规划生成此过程中操控组的m2级驱动单元对应的3m2个直线推杆的运动控制曲线;上位机将所得的运动控制曲线发送给驱动控制箱,驱动控制箱依照接收运动控制曲线分别独立驱动操控组的m2级驱动单元对应的3m2个直线推杆,每个直线推杆驱动与之固连的连续体操纵器驱动线,在直线推杆的驱动拉力和连续体操纵器的弹性恢复力作用下,连续体操纵器驱动线始终处于拉紧状态,通过协调控制操控组对应的3m2根连续体操纵器驱动线的长度,控制操控组的末端将卷取组移至物体所在的位置周围,之后操控组的m2级驱动单元对应的3m2个直线推杆进入自锁状态,操控组停止运动;同时,上位机通过连续体操纵器关节空间轨迹规划生成此过程卷取组的m1级驱动单元对应的3m1个直线推杆的运动控制曲线;上位机将所得的运动控制曲线发送给驱动控制箱,驱动控制箱依照接收运动控制曲线独立驱动卷取组的m1级驱动单元对应的3m1个直线推杆,每个直线推杆分别驱动与之固连的连续体操纵器驱动线,在直线推杆的驱动拉力和连续体操纵器的弹性恢复力作用下,连续体操纵器驱动线始终处于拉紧状态,通过协调控制卷取组对应的3m1根连续体操纵器驱动线的长度,调整连续体操纵臂的卷取组的外表面形态,使卷取组覆盖物体外表面;4)抓取物体:当卷取组的外表面与物体接触后,卷取组的卷紧运动受阻,在卷曲组的m1级驱动单元对应的3m1个直线推杆持续驱动下,3m1根连续体操纵器爪指驱动线上的拉力逐渐增大,使得卷取组对应的连续体操纵器的外表面紧紧卷住物体的表面,连续体操纵器力传感器感知驱动线上的拉力达到卷取阈值后,驱动控制箱控制卷曲组的m1级驱动单元对应的3m1个直线推杆同时进入自锁状态,卷取组停止运动,连续体操纵器实现采用卷取的方式抓取物体;卷取组对物体卷紧力的大小与卷取阈值的大小正相关;5)移动物体:卷取组对应的连续体操纵器的外表面保持卷紧物体;上位机通过连续体操纵器的笛卡尔空间轨迹规划生成此过程中操控组的m2级驱动单元对应的3m2个直线推杆的运动控制曲线;上位机将所得的运动控制曲线发送给驱动控制箱,驱动控制箱依照接收运动控制曲线分别独立驱动操控组的m2级驱动单元对应的3m2个直线推杆,每个直线推杆驱动与之固连的连续体操纵器驱动线,在直线推杆的驱动拉力和连续体操纵器的弹性恢复力作用下,连续体操纵器驱动线始终处于拉紧状态,通过协调控制操控组对应的3m2根连续体操纵器驱动线的长度,控制操控组的末端将卷有物体的卷取组移至指定位置,之后操控组的m2级驱动单元对应的3m2个直线推杆进入自锁状态,操控组再次停止运动;6)释放物体:操控组的末端位姿保持不变;上位机通过连续体操纵器关节空间轨迹规划生成释放物体过程卷取组的m1级驱动单元对应的3m1个直线推杆的运动控制曲线;上位机将所得的运动控制曲线发送给驱动控制箱,驱动控制箱依照接收运动控制曲线分别独立驱动卷取组的m1级驱动单元对应的3m1个直线推杆,每个直线推杆驱动与之固连的连续体操纵器驱动线,在直线推杆的驱动拉力和连续体操纵器的弹性恢复力作用下,连续体操纵器驱动线始终处于拉紧状态,通过协调控制卷取组对应的3m1根连续体操纵器驱动线的长度,调整卷取组外表面形态,使卷取组释放物体;
17.柔性臂基于自身固有的被动柔顺性,柔性臂能够依据狭小的非结构化空间调节自身形状。
18.本发明适用于狭小的非结构化空间,狭小的非结构化空间是指工作空间内分布有障碍物,障碍物之间的缝隙狭小,且缝隙形状不规则。比如:工业管道清理、灾后救援、水果
采摘等场景。连续体操纵器的工作空间为连续体操纵器扫过的曲面及曲面内部包含的点集,以满足其对不规则物体的抓取需求以及狭小非结构性环境中的灵活导向需求;柔性骨架固有的连续性与柔顺性能够降低人机接触过程的冲击力,提高抓取过程的安全性。
19.柔性臂的材料采用柔性的聚氯乙烯(pvc)、聚氨酯(pu)、聚乙烯(pe)、聚丙烯(pp)、聚酰胺(pa)、聚甲醛(pom)、丙烯腈-丁二烯-苯乙烯共聚物(abs)、聚碳酸酯(pc)、聚氨酯弹性体橡胶(tpu)和尼龙管中的一种。连续体操纵器驱动线和抓手驱动线采用镍钛合金丝、镀锌丝、不锈钢线和特氟龙线中的一种。
20.弹性爪掌的圆柱体材料采用镍钛合金。爪指解耦套管采用高碳钢空心螺线管。
21.软壳采用聚氯乙烯pvc材质的波纹管。
22.本发明的另一个目的在于提出一种末端抓手可隐藏的连续体抓取机器人的控制方法。
23.本发明的末端抓手可隐藏的连续体抓取机器人的控制方法,根据物体的尺寸大小,分为两种方式抓取物体,对于尺寸较小的物体采用末端柔性抓手捏取,对于尺寸较大的物体采用连续体操纵器卷取,末端柔性抓手捏取和连续体操纵器形成互补优势:
24.(一)捏取尺寸较小的物体:
25.1)捏取操作前:
26.连续体操纵器处于未变形的直线状态,弹性爪指为无变形的张开状态;
27.2)姿态调整过程:
28.上位机通过连续体操纵器的笛卡尔空间轨迹规划生成姿态调整过程中连续体操纵器的n级驱动单元对应的3n个直线推杆的运动控制曲线;上位机将所得的运动控制曲线发送给驱动控制箱,驱动控制箱依照接收的运动控制曲线独立驱动连续体操纵器的n级驱动单元对应的3n个直线推杆,每个直线推杆驱动与之固连的连续体操纵器驱动线,在直线推杆的驱动拉力和连续体操纵器的弹性恢复力作用下,连续体操纵器驱动线始终处于拉紧状态,通过协调控制3n根连续体操纵器驱动线的长度,控制连续体操纵器的末端的位姿,带动末端柔性爪手达到抓取物体的位置;并且弹性爪指的指端位于物体的周围且指臂覆盖物体的一个表面;
29.3)抓取物体:
30.上位机将抓取物体指令发送至驱动控制箱,驱动控制箱控制直线电机通过阶梯轴拉动爪指驱动线带动弹性爪掌往下沿z轴负方向驱动,从而带动弹性爪指的底部朝柔性骨架的螺旋支撑弹簧内移动,弹性爪指的指臂在螺旋支撑弹簧的末端内边缘接触点处受到位置约束,弹性爪指发生弹性形变发生闭合运动;当弹性爪指的指端与物体接触后,弹性爪指的闭合运动受阻,直线电机持续驱动,爪指驱动线上的拉力逐渐增大,使得弹性爪指的指端紧紧抓住物体的表面,爪指力传感器感知直线电机对阶梯轴的拉力达到捏取阈值后,直线电机进入自锁状态,弹性爪指停止运动,实现
31.采用捏取的方式抓取物体,弹性爪指对物体捏紧力的大小与捏取阈值的大小正相关;
32.4)移动物体:
33.末端柔性抓手保持捏紧物体,连续体操纵器将末端柔性抓手移至物体的释放位置;上位机再次通过连续体操纵器的笛卡尔空间轨迹规划生成此过程连续体操纵器的n级
驱动单元对应的3n个直线推杆的运动控制曲线;并将所得的运动控制曲线发送给驱动控制箱,驱动控制箱依照接收运动控制曲线分别独立驱动连续体操纵器的n级驱动单元对应的3n个直线推杆,每个直线推杆驱动与之固连的连续体操纵器驱动线,在直线推杆的驱动拉力和连续体操纵器的弹性恢复力作用下,连续体操纵器驱动线始终处于拉紧状态,通过协调控制3n根连续体操纵器驱动线的长度,控制连续体操纵器的末端将捏有物体的末端柔性抓手移至释放物体的位置;之后连续体操纵器的n级驱动单元对应的3n个直线推杆进入自锁状态,连续体操纵器停止运动;
34.5)释放物体:
35.弹性变形后的弹性爪指与螺旋支撑弹簧的末端内边缘接触后,在恢复力的作用下,弹性爪指有向外的运动趋势,使得弹性爪指在很小的推力下即能够完成张开动作;上位机将释放物体指令发送至驱动控制箱,驱动控制箱控制直线电机通过阶梯轴推动爪指驱动线往上沿z轴正方向驱动,在弹性恢复力的作用下弹性爪指发生张开运动,回到初始的张开状态,实现释放物体;当阶梯轴的限位轴肩与直线套管的底端接触后,在直线电机的持续推动下,对阶梯轴的推力增加,当爪指力传感器感知直线电机对阶梯轴的推力达到推力阈值后,直线电机停止驱动并进入自锁状态,末端弹性爪指恢复到初始的张开状态并停止运动;从而末端柔性抓手仅靠直线电机驱动爪指驱动线的轴向运动实现对物体的捏取和放开的操作,即末端柔性抓手采用欠驱动方式,仅通过一根爪指驱动线的轴向运动控制末端的四个指臂和指端的张开与闭合;同时,螺旋支撑弹簧的末端为漏斗状,使得弹性爪指的伸出操作更顺利;直线套管将柔性的爪指驱动线与刚性的阶梯轴的固连点限制在狭小的直线套管内运动,以避免非直线状态的爪指解耦套管对刚性的阶梯轴的直线运动产生阻碍;阶梯轴限制爪指驱动线沿z轴正方向运动的上限;在狭小的非结构化空间中操作时,直线电机通过阶梯轴拉动爪指驱动线带动弹性爪掌往下沿z轴负方向驱动,弹性爪指完全缩回至柔性骨架的螺旋支撑弹簧内中,一方面对弹性爪指起到保护作用,另一方面减小抓取机器人的体积,使其更容易穿过复杂的非结构化的狭小通道;
36.(二)卷取尺寸较大的物体:
37.1)卷取操作前:
38.连续体操纵器处于未变形的直线状态,弹性爪指为无变形的张开状态;
39.2)划分n级驱动单元:
40.根据抓取的物体的特点,将n级驱动单元划分为串联的卷取组和操控组,卷取组位于末端,操控组位于底端,卷取组包括m1级驱动单元,操控组包括m2级驱动单元,m1+m2=n,为实现稳定的卷取物体,m1≥1且卷取组的m1级驱动单元串联长度不小于卷取组包绕在物体外表面形成力闭合或形闭合的最小包绕长度;为实现引导卷曲组在笛卡尔空间内灵活移动,m2≥3;
41.3)姿态调整过程:
42.上位机通过驱动控制箱控制直线电机通过阶梯轴拉动爪指驱动线带动弹性爪掌往下沿z轴负方向驱动,从而带动弹性爪指的底部向柔性骨架的螺旋支撑弹簧内运动,弹性爪掌的底端与柔性抓手解耦套管的末端接触后,弹性爪掌往下沿z轴负方向的运动受阻,在直线电机持续驱动下,爪指驱动线上的拉力逐渐增大,爪指力传感器感知直线电机对阶梯轴的拉力达到收缩阈值后,直线电机进入自锁状态,弹性爪指完全缩入柔性骨架并停止运
动;然后,通过操控组将卷取组从当前位置移动至物体所在的位置周围,并且卷取组位于物体的周围且覆盖物体的上表面,上位机通过连续体操纵器的笛卡尔空间轨迹规划生成此过程中操控组的m2级驱动单元对应的3m2个直线推杆的运动控制曲线;上位机将所得的运动控制曲线发送给驱动控制箱,驱动控制箱依照接收运动控制曲线分别独立驱动操控组的m2级驱动单元对应的3m2个直线推杆,每个直线推杆驱动与之固连的连续体操纵器驱动线,在直线推杆的驱动拉力和连续体操纵器的弹性恢复力作用下,连续体操纵器驱动线始终处于拉紧状态,通过协调控制操控组对应的3m2根连续体操纵器驱动线的长度,控制操控组的末端将卷取组移至物体所在的位置周围,之后操控组的m2级驱动单元对应的3m2个直线推杆进入自锁状态,操控组停止运动;同时,上位机通过连续体操纵器关节空间轨迹规划生成此过程卷取组的m1级驱动单元对应的3m1个直线推杆的运动控制曲线;上位机将所得的运动控制曲线发送给驱动控制箱,驱动控制箱依照接收运动控制曲线独立驱动卷取组的m1级驱动单元对应的3m1个直线推杆,每个直线推杆分别驱动与之固连的连续体操纵器驱动线,在直线推杆的驱动拉力和连续体操纵器的弹性恢复力作用下,连续体操纵器驱动线始终处于拉紧状态,通过协调控制卷取组对应的3m1根连续体操纵器驱动线的长度,调整连续体操纵臂的卷取组的外表面形态,使卷取组覆盖物体外表面;
43.4)抓取物体:
44.当卷取组的外表面与物体接触后,卷取组的卷紧运动受阻,在卷曲组的m1级驱动单元对应的3m1个直线推杆持续驱动下,3m1根连续体操纵器爪指驱动线上的拉力逐渐增大,使得卷取组对应的连续体操纵器的外表面紧紧卷住物体的表面,连续体操纵器力传感器感知驱动线上的拉力达到卷取阈值后,驱动控制箱控制卷曲组的m1级驱动单元对应的3m1个直线推杆同时进入自锁状态,卷取组停止运动,连续体操纵器实现采用卷取的方式抓取物体;卷取组对物体卷紧力的大小与卷取阈值的大小正相关;
45.5)移动物体:
46.卷取组对应的连续体操纵器的外表面保持卷紧物体;上位机通过连续体操纵器的笛卡尔空间轨迹规划生成此过程中操控组的m2级驱动单元对应的3m2个直线推杆的运动控制曲线;上位机将所得的运动控制曲线发送给驱动控制箱,驱动控制箱依照接收运动控制曲线分别独立驱动操控组的m2级驱动单元对应的3m2个直线推杆,每个直线推杆驱动与之固连的连续体操纵器驱动线,在直线推杆的驱动拉力和连续体操纵器的弹性恢复力作用下,连续体操纵器驱动线始终处于拉紧状态,通过协调控制操控组对应的3m2根连续体操纵器驱动线的长度,控制操控组的末端将卷有物体的卷取组移至指定位置,之后操控组的m2级驱动单元对应的3m2个直线推杆进入自锁状态,操控组再次停止运动;
47.6)释放物体:
48.操控组的末端位姿保持不变;上位机通过连续体操纵器关节空间轨迹规划生成释放物体过程卷取组的m1级驱动单元对应的3m1个直线推杆的运动控制曲线;上位机将所得的运动控制曲线发送给驱动控制箱,驱动控制箱依照接收运动控制曲线分别独立驱动卷取组的m1级驱动单元对应的3m1个直线推杆,每个直线推杆驱动与之固连的连续体操纵器驱动线,在直线推杆的驱动拉力和连续体操纵器的弹性恢复力作用下,连续体操纵器驱动线始终处于拉紧状态,通过协调控制卷取组对应的3m1根连续体操纵器驱动线的长度,调整卷取组外表面形态,使卷取组释放物体。
49.本发明的优点:
50.(1)环境适应性强:
51.由于主体无识别的刚性元件,机器人能够在任意部位产生形变,使其能够柔顺的适应狭长的非结构化操作环境;机器人的驱动电机全部置于被保护的基部,无易损元件的主干能够进入危险环境作业,比如严重腐蚀、超高温、强辐射以及真空等极端环境;与气动软体材料制成的抓手相比,其优势是明显的;
52.(2)抓取目标形状尺寸多样化:
53.除了连续体操纵器能够作为执行器完成缠绕和抓取操作外,末端柔性抓手能够夹取相对于自身尺寸较小的物体,对不同形状和尺寸的抓取目标具有通用性强的特点;
54.(3)对不同抓取位置适应性强:
55.在物体移动时,根据目标物体的形态特征,能够在不同的点位抓取目标物体;
56.(4)小型化轻量化设计:
57.机器人通过弹性爪掌将来自基部的能量传递给操作末端,主干部分实现了轻量化和小型化设计;
58.(5)安全
59.不含刚性元件且所有运动支链上均无刚性运动副,上述连续体抓取机器人整体表现出灵活、柔顺及安全无害的特点。
60.(6)驱动单元模块化设计
61.模块化设计的驱动单元加工、装配及扩展简单方便;每个驱动单元具有相同的外部驱动形式,驱动单元之间的运动相互独立互不影响,能够基于一个驱动单元的运动学分析获取整个连续体操纵器的运动学逆解,易于控制。
附图说明
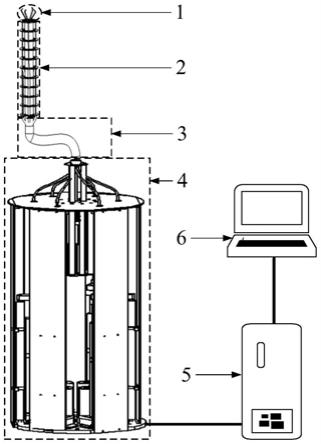
62.图1为本发明的末端抓手可隐藏的连续体抓取机器人的一个实施例的示意图;
63.图2为本发明的末端抓手可隐藏的连续体抓取机器人的一个实施例的末端柔性抓手的示意图,其中,(a)为张开的示意图,(b)为闭合的示意图;
64.图3为本发明的末端抓手可隐藏的连续体抓取机器人的一个实施例的连续体操纵器和柔性臂的示意图;
65.图4为本发明的末端抓手可隐藏的连续体抓取机器人的一个实施例的驱动台的示意图,其中,(a)为驱动台的整体示意图,(b)为爪指驱动线连接至直线电机的示意图,(c)为连续体操纵器驱动线连接至直线推杆的示意图。
具体实施方式
66.下面结合附图,通过具体实施例,进一步阐述本发明。
67.如图1所示,本实施例的末端抓手可隐藏的连续体抓取机器人包括:末端柔性抓手1、连续体操纵器2、柔性臂3、驱动台4、驱动控制箱5以及上位机6;其中,末端柔性抓手1、连续体操纵器2和柔性臂3依次连接为一个整体,末端柔性抓手1和连续体操纵器2分别连接至驱动台4;驱动台4通过电缆连接至驱动控制箱5;驱动控制箱5通过电缆连接至上位机6;
68.末端柔性抓手1包括:弹性爪指11、弹性爪掌12、爪指驱动线13和爪指解耦套管14;
弹性爪指11包括两组弹性片,每一组弹性片为由一片超弹性金属片构成的对称的形状,包括连接为一体的u型底部、指臂和指端,u型底部的两个末端分别连接指臂,指臂与u型底部的末端具有倾斜角,夹角为145
°
,在指臂的末端连接指端,指端与指臂之间具有向内的夹角,夹角为90
°
;弹性爪掌12为可弯曲的柱状体,柱状体的中心轴沿z轴,在柱状体上开设有贯穿侧壁且通过中心轴的两个互相垂直的限位孔,限位孔的轴线分别平行于x轴和y轴,并在z轴上具有高度差;弹性爪指11中的每一组弹性片分别对应一个限位孔,弹性片的一端穿过对应的限位孔15,弹性片的指臂和指端露出弹性爪掌12的末端,并使得u型底部位于限位孔中,从而实现弹性爪指11通过u型底部安装在弹性爪掌12上,并且两组弹性片正交布置,两组弹性爪指11的u形底部与弹性爪掌12上的两个限位孔采用间隙配合,即弹性爪指11与弹性爪掌12之间能绕限位孔的轴向发生相对转动,以此提升弹性爪指11对不同形状目标抓取的自适应能力;弹性爪掌12的底端连接爪指驱动线13,爪指驱动线13连接至驱动台4;在爪指驱动线13外包覆有爪指解耦套管14,爪指解耦套管14为与驱动线间隙配合的同心管套,爪指解耦套管14的内径小于弹性爪掌12的外径,以实现机械限位;
69.连续体操纵器2包括:柔性骨架21、n级驱动单元27和软壳;柔性骨架21包括披覆层和螺旋支撑弹簧,螺旋支撑弹簧的内部中空,在螺旋支撑弹簧的外部包覆披覆层,从而形成内部中空的柔性骨架21,能够实现弯曲和周转运动且轴向不能够拉伸与压缩,中心轴位于z轴;螺旋支撑弹簧的末端为漏斗状;n为2;弹性爪掌12位于螺旋支撑弹簧内的末端,爪指解耦套管14穿过螺旋支撑弹簧的内部,且爪指解耦套管14的末端与螺旋支撑弹簧的末端具有高度差,高度差不小于弹性爪指11闭合时的长度,使得爪指解耦套管14的末端留有弹性爪指11缩回螺旋支撑弹簧所需的高度差;
70.每一级驱动单元27包括:末端导线盘22、多个中间导线盘23、基部导线盘24、连续体操纵器驱动线25和连续体操纵器解耦套管26;末端导线盘22、多个中间导线盘23和基部导线盘24分别为平行于xy平面的形状相同的环状的圆盘,从末端到底端依次套在该级驱动单元对应的柔性骨架外,且圆盘的内壁与柔性骨架的外壁固连;在每一个中间导线盘和基部导线盘24相对应的位置均开设有三个呈中心对称的导线孔28和三个呈中心对称的弧形解耦套管过线孔29;在每一根连续体操纵器驱动线25的末端固定在末端导线盘22的底面,然后依次穿过各个中间导线盘和基部导线盘24相应的导线孔,并从基部导线盘24的底面穿出;在连续体操纵器驱动线25穿出本级的基部导线盘24的部分外包有连续体操纵器解耦套管26,三根连续体操纵器解耦套管26的末端固定在本级的基部导线盘24的底面;前一级的三根连续体操纵器解耦套管26依次通过以后各级弧形解耦套管过线孔,并从最后一级的基部导线盘24的底面穿出;爪指解耦套管14的底端从最后一级驱动单元的基部导线盘24的底面伸出;
71.多级驱动单元从末端朝底端依次串联套在柔性骨架外,后一级驱动单元的末端导线盘22与前一级驱动单元的基部导线盘24为同一导线盘;后一级驱动单元的导线孔与前一级驱动单元的导线孔角度错位60
°
;爪指解耦套管14和各级驱动单元的连续体操纵器解耦套管26在穿过最后一级驱动单元的基部导线盘24的下表面后合束;软壳套在末端导线盘22、多个中间导线盘23和基部导线盘24外,软壳的内壁与末端导线盘22、多个中间导线盘23和基部导线盘24的外边缘固连,形成连续体操纵器2的外表面;柔性臂3为内部中空的柔性管,采用柔性材料;柔性臂3套在合束后的爪指解耦套管14和3n根连续体操纵器解耦套管26
外;
72.驱动台4包括上支撑板41、下支撑板42、侧壁43、分线支架44、电机固定架45、直线套管46、阶梯轴47、直线电机48、爪指力传感器d1、n组位移传感器d2、n组连续体操纵器力传感器d3和n组直线推杆49;位于水平面的上支撑板41和下支撑板42相对,二者之间通过侧壁43固定连接,在上支撑板41的上表面和下表面分别设置分线支架44和电机固定架45;柔性臂3的末端与分线支架44的上表面固连,爪指解耦套管14和三根连续体操纵器解耦套管26在穿过分线支架44后离束;在上支撑板41上固定直线套管46,直线套管46为内部中空的刚性导管,爪指解耦套管14的底端固连直线套管46的末端,爪指驱动线13伸入直线套管46内连接至阶梯轴47的末端,阶梯轴47的末端位于直线套管46内;阶梯轴47的底端连接至直线电机48,在阶梯轴47的底端与直线电机48之间设置爪指力传感器d1;直线电机48放置在电机固定架45内,直线电机48沿z轴运动;与n级驱动单元相对应,在上支撑板41上开设有n组通孔,并且在下支撑板42的上表面安装有n组直线推杆49;与每一级驱动单元相对应,每一组通孔包括三个通孔,并且每一组直线推杆49包括三根直线推杆49;每一级驱动单元的三根连续体操纵器2解耦套的底端分别对应着相应的通孔固连在上支撑板41的上表面,每一级驱动单元的三根连续体操纵器驱动线25的底端穿过相应的通孔,连接至对应的直线推杆49;在每一根连续体操纵器驱动线25的底端与相对应的直线推杆49之间分别设置连续体操纵器力传感器d3,以防止驱动丝的驱动力过大,从而保证安全;并且在三根连续体操纵器驱动线25的底端与相对应的直线推杆49之间分别设置位移传感器d2,位移传感器d2固定在驱动台4的侧壁43上,从而检测连续体操纵器驱动线25的轴向运动距离和约束直线推杆49运动行程;
73.驱动控制箱5包括电机驱动器、推杆驱动器和电源;其中,电源分别连接至电机驱动器和推杆驱动器,提供工作电压;驱动台4的直线电机48通过电缆连接至电机驱动器;与n组直线推杆49相对应,具有n组推杆驱动器,每一组推杆驱动器包括三个推杆驱动器,每一根直线推杆49通过电缆分别连接至对应的推杆驱动器;电机驱动器和每个推杆驱动器分别连接至上位机6。
74.本实施例中,柔性臂3的材料采用柔性的聚氯乙烯;连续体操纵器驱动线25和抓手驱动线采用镍钛合金丝;弹性爪掌12的圆柱体材料采用镍钛合金;爪指解耦套管14采用高碳钢空心螺线管;软壳采用聚氯乙烯pvc材质的波纹管。
75.本实施例的末端抓手可隐藏的连续体抓取机器人的控制方法,根据物体的大小,分为两种方式抓取物体,对于尺寸较小的物体(5~60mm)采用末端柔性抓手1捏取,对于尺寸较大的物体(50~150mm)采用连续体操纵器2卷取,末端柔性抓手1捏取和连续体操纵器2形成互补优势:包括:
76.(一)捏取尺寸较小的物体:
77.1)捏取操作前:
78.连续体操纵器2处于未变形的直线状态,弹性爪指11为无变形的张开状态;
79.2)姿态调整过程:
80.上位机6通过连续体操纵器2的笛卡尔空间轨迹规划生成姿态调整过程中连续体操纵器2的n级驱动单元对应的3n个直线推杆49的运动控制曲线;连续体操纵器2的笛卡尔空间轨迹规划是指给定连续体操纵器2末端或指定的控制点的约束条件(起点、终点或中间
结点的位置、速度、加速度等)通过插值算法及运动学逆解生成对应的直线推杆49的运动控制曲线的过程;上位机6将所得的运动控制曲线发送给驱动控制箱5,驱动控制箱5依照接收的运动控制曲线独立驱动连续体操纵器2的n级驱动单元对应的3n个直线推杆49,每个直线推杆49驱动与之固连的连续体操纵器驱动线25,在直线推杆49的驱动拉力和连续体操纵器2的弹性恢复力作用下,连续体操纵器驱动线25始终处于拉紧状态,通过协调控制3n根连续体操纵器驱动线25的长度,控制连续体操纵器2的末端的位姿,带动末端柔性爪手达到抓取物体的位置;并且弹性爪指11的指端位于物体的周围且指臂覆盖物体的上表面;
81.3)抓取物体:
82.上位机6将抓取物体指令发送至驱动控制箱5,驱动控制箱5控制直线电机48通过阶梯轴47拉动爪指驱动线13带动弹性爪掌12往下沿z轴负方向驱动,从而带动弹性爪指11的底部朝柔性骨架的螺旋支撑弹簧内移动,弹性爪指11的指臂在螺旋支撑弹簧的末端内边缘接触点处受到位置约束,弹性爪指11发生弹性形变发生闭合运动;当弹性爪指11的指端与物体接触后,弹性爪指11的闭合运动受阻,直线电机48持续驱动,爪指驱动线13上的拉力逐渐增大,使得弹性爪指11的指端紧紧抓住物体的表面,爪指力传感器d1感知直线电机48对阶梯轴47的拉力达到捏取阈值(2~10n)后,直线电机48进入自锁状态,弹性爪指11停止运动,实现采用捏取的方式抓取物体,弹性爪指11对物体捏紧力的大小与捏取阈值的大小正相关;
83.4)移动物体:
84.末端柔性抓手1保持捏紧物体,连续体操纵器2将末端柔性抓手1移至物体的释放位置;上位机6再次通过连续体操纵器2的笛卡尔空间轨迹规划生成此过程连续体操纵器2的n级驱动单元对应的3n个直线推杆49的运动控制曲线;并将所得的运动控制曲线发送给驱动控制箱5,驱动控制箱5依照接收运动控制曲线分别独立驱动连续体操纵器2的n级驱动单元对应的3n个直线推杆49,每个直线推杆49驱动与之固连的连续体操纵器驱动线25,在直线推杆49的驱动拉力和连续体操纵器2的弹性恢复力作用下,连续体操纵器驱动线25始终处于拉紧状态,通过协调控制3n根连续体操纵器驱动线25的长度,控制连续体操纵器2的末端将捏有物体的末端柔性抓手1移至释放物体的位置;之后连续体操纵器2的n级驱动单元对应的3n个直线推杆49进入自锁状态,连续体操纵器2停止运动;
85.5)释放物体:
86.弹性变形后的弹性爪指11与螺旋支撑弹簧的末端内边缘接触后,在恢复力的作用下,弹性爪指11有向外的运动趋势,使得弹性爪指11在很小的推力下即能够完成张开动作;上位机6将释放物体指令发送至驱动控制箱5,驱动控制箱5控制直线电机48通过阶梯轴47推动爪指驱动线13往上沿z轴正方向驱动,在弹性恢复力的作用下弹性爪指11发生张开运动,回到初始的张开状态,实现释放物体;当阶梯轴47的限位轴肩与直线套管46的底端接触后,在直线电机48的持续推动下,对阶梯轴47的推力增加,当爪指力传感器d1感知直线电机48对阶梯轴47的推力达到推力阈值(2~5n)后,直线电机48停止驱动并进入自锁状态,末端弹性爪指11恢复到初始的张开状态并停止运动;从而末端柔性抓手1仅靠直线电机48驱动爪指驱动线13的轴向运动实现对物体的捏取和放开的操作,即末端柔性抓手1采用欠驱动方式,仅通过一根爪指驱动线13的轴向运动控制末端的四个指臂和指端的张开与闭合;同时,螺旋支撑弹簧的末端为漏斗状,使得弹性爪指11的伸出操作更顺利;直线套管46将柔性
的爪指驱动线13与刚性的阶梯轴47的固连点限制在狭小的直线套管46内运动,以避免非直线状态的爪指解耦套管14对刚性的阶梯轴47的直线运动产生阻碍;阶梯轴47限制爪指驱动线13沿z轴正方向运动的上限;在狭小的非结构化空间中操作时,直线电机48通过阶梯轴47拉动爪指驱动线13带动弹性爪掌12往下沿z轴负方向驱动,弹性爪指11完全缩回至柔性骨架的螺旋支撑弹簧内中,一方面对弹性爪指11起到保护作用,另一方面减小抓取机
87.器人的体积,使其更容易穿过复杂的非结构化的狭小通道;
88.(二)卷取尺寸较大的物体:
89.1)卷取操作前:
90.连续体操纵器2处于未变形的直线状态,弹性爪指11为无变形的张开状态;
91.2)划分n级驱动单元:
92.根据抓取的物体的特点,将n级驱动单元划分为串联的卷取组和操控组,卷取组位于末端,操控组位于底端,卷取组包括m1级驱动单元,操控组包括m2级驱动单元,m1+m2=n,为实现稳定的卷取物体,m1≥1且卷取组的m1级驱动单元串联长度不小于卷取组包绕在物体外表面形成力闭合或形闭合的最小包绕长度;为实现引导卷曲组在笛卡尔空间内灵活移动,m2≥3;
93.3)姿态调整过程:
94.上位机6通过驱动控制箱5控制直线电机48通过阶梯轴47拉动爪指驱动线13带动弹性爪掌12往下沿z轴负方向驱动,从而带动弹性爪指11的底部向柔性骨架的螺旋支撑弹簧内运动,弹性爪掌12的底端与柔性抓手解耦套管的末端接触后,弹性爪掌12往下沿z轴负方向的运动受阻,在直线电机48持续驱动下,爪指驱动线13上的拉力逐渐增大,爪指力传感器d1感知直线电机48对阶梯轴47的拉力达到收缩阈值(2-5n)后,直线电机48进入自锁状态,弹性爪指11完全缩入柔性骨架并停止运动;然后,通过操控组将卷取组从当前位置移动至物体所在的位置周围,并且卷取组位于物体的周围且覆盖物体的上表面,上位机6通过连续体操纵器2的笛卡尔空间轨迹规划生成此过程中操控组的m2级驱动单元对应的3m2个直线推杆49的运动控制曲线;上位机6将所得的运动控制曲线发送给驱动控制箱5,驱动控制箱5依照接收运动控制曲线分别独立驱动操控组的m2级驱动单元对应的3m2个直线推杆49,每个直线推杆49驱动与之固连的连续体操纵器驱动线25,在直线推杆49的驱动拉力和连续体操纵器2的弹性恢复力作用下,连续体操纵器驱动线25始终处于拉紧状态,通过协调控制操控组对应的3m2根连续体操纵器驱动线25的长度,控制操控组的末端将卷取组移至物体所在的位置周围,之后操控组的m2级驱动单元对应的3m2个直线推杆49进入自锁状态,操控组停止运动;同时,上位机6通过连续体操纵器2关节空间轨迹规划生成此过程卷取组的m1级驱动单元对应的3m1个直线推杆49的运动控制曲线;连续体操纵器2的关节空间轨迹规划是指给定描述连续体操纵器2的形态的约束条件(起点、终点或中间结点的角度、角速度、角加速度等)通过插值算法及运动学逆解生成直线推杆49的运动控制曲线的过程;上位机6将所得的运动控制曲线发送给驱动控制箱5,驱动控制箱5依照接收运动控制曲线独立驱动卷取组的m1级驱动单元对应的3m1个直线推杆49,每个直线推杆49分别驱动与之固连的连续体操纵器驱动线25,在直线推杆49的驱动拉力和连续体操纵器2的弹性恢复力作用下,连续体操纵器驱动线25始终处于拉紧状态,通过协调控制卷取组对应的3m1根连续体操纵器驱动线25的长度,调整连续体操纵臂的卷取组的外表面形态,使卷取组覆盖物体外表面;
95.4)抓取物体:
96.当卷取组的外表面与物体接触后,卷取组的卷紧运动受阻,在卷曲组的m1级驱动单元对应的3m1个直线推杆49持续驱动下,3m1根连续体操纵器2爪指驱动线13
97.上的拉力逐渐增大,使得卷取组对应的连续体操纵器2的外表面紧紧卷住物体的表面,连续体操纵器力传感器d3感知驱动线上的拉力达到卷取阈值(80~100n)后,驱动控制箱5控制卷曲组的m1级驱动单元对应的3m1个直线推杆49同时进入自锁状态,卷取组停止运动,连续体操纵器2实现采用卷取的方式抓取物体;卷取组对物体卷紧力的大小与卷取阈值的大小正相关;
98.5)移动物体:
99.卷取组对应的连续体操纵器2的外表面保持卷紧物体;上位机6通过连续体操纵器2的笛卡尔空间轨迹规划生成此过程中操控组的m2级驱动单元对应的3m2个直线推杆49的运动控制曲线;上位机6将所得的运动控制曲线发送给驱动控制箱5,驱动控制箱5依照接收运动控制曲线分别独立驱动操控组的m2级驱动单元对应的3m2个直线推杆49,每个直线推杆49驱动与之固连的连续体操纵器驱动线25,在直线推杆49的驱动拉力和连续体操纵器2的弹性恢复力作用下,连续体操纵器驱动线25始终处于拉紧状态,通过协调控制操控组对应的3m2根连续体操纵器驱动线25的长度,控制操控组的末端将卷有物体的卷取组移至指定位置,之后操控组的m2级驱动单元对应的3m2个直线推杆49进入自锁状态,操控组再次停止运动;
100.6)释放物体:
101.操控组的末端位姿保持不变;上位机6通过连续体操纵器2关节空间轨迹规划生成释放物体过程卷取组的m1级驱动单元对应的3m1个直线推杆49的运动控制曲线;上位机6将所得的运动控制曲线发送给驱动控制箱5,驱动控制箱5依照接收运动控制曲线分别独立驱动卷取组的m1级驱动单元对应的3m1个直线推杆49,每个直线推杆49驱动与之固连的连续体操纵器驱动线25,在直线推杆49的驱动拉力和连续体操纵器2的弹性恢复力作用下,连续体操纵器驱动线25始终处于拉紧状态,通过协调控制卷取组对应的3m1根连续体操纵器驱动线25的长度,调整卷取组外表面形态,使卷取组释放物体。
102.最后需要注意的是,公布实施例的目的在于帮助进一步理解本发明,但是本领域的技术人员可以理解:在不脱离本发明及所附的权利要求的精神和范围内,各种替换和修改都是可能的。因此,本发明不应局限于实施例所公开的内容,本发明要求保护的范围以权利要求书界定的范围为准。