1.本实用新型涉及机器人技术领域,尤其涉及一种教育陪伴机器人。
背景技术:
2.随着人工智能技术、计算机技术等相关技术的发展,市面上已成功推出智伴教育机器人,这些机器人通常服务于儿童的智能成长,为儿童们提供在线教育资源和智能的特色服务等,目前一些儿童教育用机器人,通常底部用来支撑的撑脚都以固定的方式安装,从而无法满足人们根据不同身高的儿童调节机器人高度的需求,不便于人们使用。
技术实现要素:
3.本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种教育陪伴机器人。
4.为了实现上述目的,本实用新型采用了如下技术方案:一种教育陪伴机器人,包括机器人本体,所述机器人本体的底面靠近一侧位置处固装有连接块a,所述连接块a的内部位于顶面位置处转动有锥齿轮a,所述连接块a的一侧转动有锥齿轮b,所述锥齿轮a的表面固装有螺纹杆,所述螺纹杆的表面滑动连接有撑腿,所述锥齿轮b的一侧固装有转把,所述机器人本体的底面靠近另一侧位置处固定安装有连接块b,所述连接块a和连接块b的内部均滑动有撑腿,所述撑腿之间固定连接有支撑板,所述机器人本体的后表面设置有收纳装置。
5.为了方便人们转动锥齿轮b,本实用新型改进有,所述转把贯穿连接块a的一侧,所述转把与连接块a转动连接。
6.为了使锥齿轮a和锥齿轮b转动,本实用新型改进有,所述锥齿轮a和锥齿轮b相啮合。
7.为了提高机器人本体的稳定性,本实用新型改进有,所述支撑板的形状为十字形。
8.为了使机器人本体可以收纳物品,本实用新型改进有,所述的收纳装置包括挡块,所述挡块固装在机器人本体的后表面,所述挡块之间转动有转轴,所述转轴的表面固装有盖板。
9.为了将盖板限位,本实用新型改进有,所述挡块和盖板之间固定连接有扭簧。
10.与现有技术相比,本实用新型的优点和积极效果在于,
11.1、本实用新型中,实际使用时,通过设置机器人本体、连接块a、锥齿轮a、锥齿轮b、螺纹杆、撑腿、支撑板、转把和连接块b,方便人们对机器人本体的高度进行调节,从而方便不同身高的儿童使用机器人本体,同时操作简单便捷,利于实际使用。
12.2、本实用新型中,实际使用时,通过设置收纳装置,方便人们将物品收纳在机器人本体的内部,同时通过增加机器人本体的重量,避免儿童在使用机器人本体时,轻易将机器人本体碰倒从而使机器人本体受损的情况。
附图说明
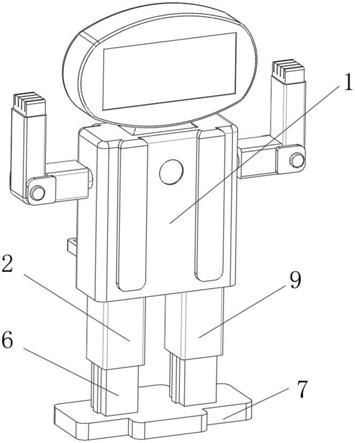
13.图1为本实用新型提出一种教育陪伴机器人的整体结构示意图;
14.图2为本实用新型提出一种教育陪伴机器人的侧视图;
15.图3为本实用新型提出一种教育陪伴机器人中图2中连接块a位置处的部分结构剖视示意图;
16.图4为本实用新型提出一种教育陪伴机器人的后视图;
17.图5为本实用新型提出一种教育陪伴机器人的俯视图;
18.图6为本实用新型提出一种教育陪伴机器人中图5中a处放大图。
19.图例说明:
20.1、机器人本体;2、连接块a;3、锥齿轮a;4、锥齿轮b;5、螺纹杆;6、撑腿;7、支撑板;8、转把;9、连接块b;10、挡块;11、转轴;12、盖板;13、扭簧。
具体实施方式
21.为了能够更清楚地理解本实用新型的上述目的、特征和优点,下面结合附图和实施例对本实用新型做进一步说明。需要说明的是,在不冲突的情况下,本申请的实施例及实施例中的特征可以相互组合。
22.在下面的描述中阐述了很多具体细节以便于充分理解本实用新型,但是,本实用新型还可以采用不同于在此描述的其他方式来实施,因此,本实用新型并不限于下面公开说明书的具体实施例的限制。
23.请参阅图1-6,本实用新型提供一种技术方案:一种教育陪伴机器人,包括机器人本体1,机器人本体1的底面靠近一侧位置处固装有连接块a2,连接块a2的内部位于顶面位置处转动有锥齿轮a3,连接块a2的一侧转动有锥齿轮b4,锥齿轮a3的表面固装有螺纹杆5,螺纹杆5的表面滑动连接有撑腿6,锥齿轮b4的一侧固装有转把8,机器人本体1的底面靠近另一侧位置处固定安装有连接块b9,连接块a2和连接块b9的内部均滑动有撑腿6,撑腿6之间固定连接有支撑板7,支撑板7的形状为十字形,通过设置支撑板7,起到了支撑机器人本体1的作用,同时将支撑板7的形状设置为十字形,可以有效的避免机器人本体1前后晃动从而倾倒的情况,提高了机器人本体1的稳固性。
24.转把8贯穿连接块a2的一侧,转把8与连接块a2转动连接。通过设置转把8,方便人们将锥齿轮b4进行转动,锥齿轮a3和锥齿轮b4相啮合,通过设置相互啮合的锥齿轮a3和锥齿轮b4,当锥齿轮b4在转把8的带动下转动时,此时锥齿轮b4则会带动锥齿轮a3转动,最终锥齿轮a3会带动螺纹杆5转动,从而起到了调节撑腿6高度的作用。
25.机器人本体1的后表面设置有收纳装置,收纳装置包括挡块10,挡块10固装在机器人本体1的后表面,挡块10之间转动有转轴11,转轴11的表面固装有盖板12,通过设置收纳装置,人们可以将备用蓄电池收纳在机器人本体1的背部,当机器人本体1电量不足时,人们可以及时将蓄电池取出从而使机器人本体1可以正常使用。
26.挡块10和盖板12之间固定连接有扭簧13,通过设置扭簧13将挡块10与盖板12进行连接,从而当人们松开盖板12时,此时扭簧13带动盖板12移动至两组挡块10之间,从而对机器人本体1背部放置的物品进行收纳。
27.工作原理:通过设置机器人本体1、连接块a2、锥齿轮a3、锥齿轮b4、螺纹杆5、撑腿
6、支撑板7、转把8和连接块b9,当人们需要调节机器人本体1的高度时,此时转动转把8,转把8带动锥齿轮b4转动,同时锥齿轮b4带动锥齿轮a3转动,在锥齿轮a3转动的同时,此时锥齿轮a3带动螺纹杆5转动,同时在连接块a2的限位下,此时撑腿6在螺纹杆5的表面滑动,同时两组撑腿6带动支撑板7在连接块a2和连接块b9的内部平移运动,起到了调节机器人本体1高度的作用,通过设置收纳装置,在机器人本体1的日常使用时,人们可以拉动盖板12,此时盖板12带动转轴11在挡块10之间转动,这时人们可以将蓄电池等物品收纳至机器人本体1背部,最后松开盖板12,扭簧13则带动盖板12盖在两组挡块10之间,当机器人本体1电量不足时,此时人们可以将蓄电池取出,并为机器人本体1更换蓄电池。
28.以上所述,仅是本实用新型的较佳实施例而已,并非是对本实用新型作其它形式的限制,任何熟悉本专业的技术人员可能利用上述揭示的技术内容加以变更或改型为等同变化的等效实施例应用于其它领域,但是凡是未脱离本实用新型技术方案内容,依据本实用新型的技术实质对以上实施例所作的任何简单修改、等同变化与改型,仍属于本实用新型技术方案的保护范围。
技术特征:
1.一种教育陪伴机器人,包括机器人本体(1),其特征在于:所述机器人本体(1)的底面靠近一侧位置处固装有连接块a(2),所述连接块a(2)的内部位于顶面位置处转动有锥齿轮a(3),所述连接块a(2)的一侧转动有锥齿轮b(4),所述锥齿轮a(3)的表面固装有螺纹杆(5),所述螺纹杆(5)的表面滑动连接有撑腿(6),所述锥齿轮b(4)的一侧固装有转把(8),所述机器人本体(1)的底面靠近另一侧位置处固定安装有连接块b(9),所述连接块a(2)和连接块b(9)的内部均滑动有撑腿(6),所述撑腿(6)之间固定连接有支撑板(7),所述机器人本体(1)的后表面设置有收纳装置。2.根据权利要求1所述的一种教育陪伴机器人,其特征在于:所述转把(8)贯穿连接块a(2)的一侧,所述转把(8)与连接块a(2)转动连接。3.根据权利要求1所述的一种教育陪伴机器人,其特征在于:所述锥齿轮a(3)和锥齿轮b(4)相啮合。4.根据权利要求1所述的一种教育陪伴机器人,其特征在于:所述支撑板(7)的形状为十字形。5.根据权利要求1所述的一种教育陪伴机器人,其特征在于:所述的收纳装置包括挡块(10),所述挡块(10)固装在机器人本体(1)的后表面,所述挡块(10)之间转动有转轴(11),所述转轴(11)的表面固装有盖板(12)。6.根据权利要求5所述的一种教育陪伴机器人,其特征在于:所述挡块(10)和盖板(12)之间固定连接有扭簧(13)。
技术总结
本实用新型提供一种教育陪伴机器人,涉及机器人技术领域,包括机器人本体,所述机器人本体的底面靠近一侧位置处固装有连接块a,所述连接块a的内部位于顶面位置处转动有锥齿轮a,所述连接块a的一侧转动有锥齿轮b,所述锥齿轮a的表面固装有螺纹杆,所述螺纹杆的表面滑动连接有撑腿,所述锥齿轮b的一侧固装有转把,所述机器人本体的底面靠近另一侧位置处固定安装有连接块b,实际使用时,通过设置机器人本体、连接块a、锥齿轮a、锥齿轮b、螺纹杆、撑腿、支撑板、转把和连接块b,方便人们对机器人本体的高度进行调节,从而方便不同身高的儿童使用机器人本体,同时操作简单便捷,利于实际使用。利于实际使用。利于实际使用。
技术研发人员:潘晓丹
受保护的技术使用者:广东乐贝塔教育科技有限公司
技术研发日:2021.09.26
技术公布日:2022/2/11