1.本发明涉及水刀领域,具体涉及用机器人水刀自适应切割物品的装置及方法。
背景技术:
2.水刀是通过高压水射流切割技术进行切割的设备,传统的水刀所能切割的路线图形为固定路线,每次更换所要切割物品需重新调整切割路线,偶尔还会因人手工调整失误造成误切,易造成物品损坏或物品夹具被切等。因此,研究一种可以根据物品大小自适应切割路线的装置是非常重要的。
技术实现要素:
3.本发明要解决的技术问题是水刀是通过高压水射流切割技术进行切割的设备,传统的水刀所能切割的路线图形为固定路线,每次更换所要切割物品需重新调整切割路线,偶尔还会因人手工调整失误造成误切,易造成物品损坏或物品夹具被切等为解决上述技术问题,本发明采用如下技术手段:机器人水刀自适应切割物品的装置及方法,所述的机器人水刀自适应切割方法步骤如下:第一步:入料:推板气缸通过控制系统通电启动将物料推板以及物料推入切割位置,物料推板伸出到位后退回,完成入料;第二步:获取数据:夹板气缸通过控制系统通电启动将物料夹板,物料夹板夹住物料,拉绳传感器实时获取夹板位置,夹板实时位置信号传送回plc,在由plc通过profinet通讯自动赋值机器人切割参数;第三步:自动切割:机器人水刀自动按设计路径进行切割,设计路径进行切割包括ce方式切割、be方式切割和ae方式切割,ce方式切割首先进行,ce方式切割完进行be方式切割,be方式切割完进行ae方式切割。
4.作为优选,本发明更进一步的技术方案是:所述的获取数据中切割参数包括机器人水刀切割的切割起始点、切割距离、切割间隔。
5.所述的切割起始点包括xyz三轴坐标数值。
6.切割距离为被切割物料总长度;切割间隔为手动设置所需块状大小。
7.所述的ce方式切割以c点为坐标,cx为拉绳传感器实时位置,cy为推板伸出到位点,cz为最下端位置,其中cy和cz参数固定。
8.所述的be方式切割以b点为坐标,bx为拉绳传感器实时位置,by为推板伸出到位点,bz为物料夹板高度,所述的by和bz参数固定。
9.所述的ae方式切割以a点为坐标,ax为拉绳传感器实时位置,ay为推板伸出到位点,az为物料夹板高度,所述的ay和az参数固定。
10.所述的机器人水刀自适应切割物品的装置包括控制单元、物品夹具工装、拉绳感
应结构和切割装置,所述的控制单元为plc,所述的拉绳感应结构为拉绳传感器,所述的物品夹具工装包括推送结构和夹持结构,所述的推送结构为物料推板和连接物料推板的推板气缸,夹持结构为夹板和连接物料夹板的夹板气缸,所述的切割装置为机器人水刀。
11.所述的plc为可编程控制器,拉绳传感器通过数据线和无线蓝牙装置连接plc,plc可以实时接收拉绳传感器传输的数据,依据数据计算机器人水刀切割的切割起始点、切割距离、切割间隔。
12.所述的机器人水刀设置在机器人水刀自适应切割物品的装置工作界面上,拉绳传感器设置在夹板气缸的外侧。
13.本发明同现有技术相比,通过物品夹具工装和拉绳传感获取所需切割物品位置,通过plc进行自动计算设计出机器人水刀切割的切割起始点(xyz三轴坐标)、切割距离、切割间隔,从而实现机器人水刀自适应切割物品。
附图说明
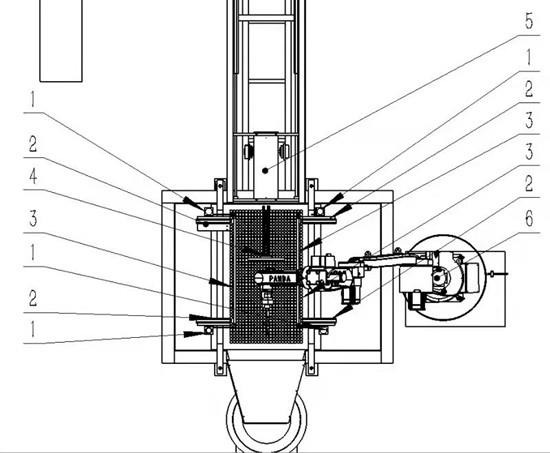
14.图1为本发明机器人水刀切割装置示意图。
15.图2为本发明自适应水刀切割路径示意图。
16.附图标记说明:1-拉绳传感器;2-夹板气缸;3-物料夹板;4-物料推板;5-推板气缸;6-机器人水刀。
具体实施方式
17.下面结合实施例,进一步说明本发明。
18.具体实施例1:参见图1可知,本发明专利中,第一步:先由5推板气缸得电将4物料推板以及物料推入切割位置,4物料推板伸出到位后退回;第二步:2夹板气缸得电3物料夹板将产品夹住,1拉绳传感器实时获取夹板位置,夹板实时位置信号传送回plc,在由plc通过profinet通讯自动赋值机器人切割参数(参数包括:机器人水刀切割的切割起始点(xyz三轴坐标)、切割距离、切割间隔);第三步:6机器人水刀自动按路径进行切割。
19.切割方式见图2首先进行ce方式切割,c点坐标:cx=拉绳传感器实时位置,cy=推板伸出到位点(参数固定),cz最下端位置(参数固定)。
20.ce方式切割完进行be方式切割,b点坐标:bx=拉绳传感器实时位置,by=推板伸出到位点(参数固定),bz=物料夹板高度(参数固定)。
21.be方式切割完进行ae方式切割,a点坐标:ax=拉绳传感器实时位置,ay=推板伸出到位点(参数固定),az=物料夹板高度(参数固定)。
22.切割距离=被切割物料总长度。切割间隔=手动设置所需块状大小。
23.具体实施例2:一种自适应切割物品的装置,本发明包括plc、拉绳传感、物品夹具工装、机器人水刀。
24.由于以上所述仅为本发明的具体实施方式,但本发明的保护不限于此,任何本技术领域的技术人员所能想到本技术方案技术特征的等同的变化或替代,都涵盖在本发明的
保护范围之内。
技术特征:
1.机器人水刀自适应切割物品的装置及方法,其特征在于:所述的机器人水刀自适应切割方法步骤如下:第一步:入料:推板气缸通过控制系统通电启动将物料推板以及物料推入切割位置,物料推板伸出到位后退回,完成入料;第二步:获取数据:夹板气缸通过控制系统通电启动将物料夹板,物料夹板夹住物料,拉绳传感器实时获取夹板位置,夹板实时位置信号传送回plc,在由plc通过profinet通讯自动赋值机器人切割参数;第三步:自动切割:机器人水刀自动按设计路径进行切割,设计路径进行切割包括ce方式切割、be方式切割和ae方式切割,ce方式切割首先进行,ce方式切割完进行be方式切割,be方式切割完进行ae方式切割。2.根据权利要求1所述的机器人水刀自适应切割物品的装置及方法,其特征在于:所述的获取数据中切割参数包括机器人水刀切割的切割起始点、切割距离、切割间隔。3.根据权利要求2所述的机器人水刀自适应切割物品的装置及方法,其特征在于:所述的切割起始点包括xyz三轴坐标数值。4.根据权利要求2所述的机器人水刀自适应切割物品的装置及方法,其特征在于:切割距离为被切割物料总长度;切割间隔为手动设置所需块状大小。5.根据权利要求1所述的机器人水刀自适应切割物品的装置及方法,其特征在于:所述的ce方式切割以c点为坐标,cx为拉绳传感器实时位置,cy为推板伸出到位点,cz为最下端位置,其中cy和cz参数固定。6.根据权利要求1所述的机器人水刀自适应切割物品的装置及方法,其特征在于:所述的be方式切割以b点为坐标,bx为拉绳传感器实时位置,by为推板伸出到位点,bz为物料夹板高度,所述的by和bz参数固定。7.根据权利要求1所述的机器人水刀自适应切割物品的装置及方法,其特征在于:所述的ae方式切割以a点为坐标,ax为拉绳传感器实时位置,ay为推板伸出到位点,az为物料夹板高度,所述的ay和az参数固定。8.根据权利要求1所述的机器人水刀自适应切割物品的装置及方法,其特征在于:所述的机器人水刀自适应切割物品的装置包括控制单元、物品夹具工装、拉绳感应结构和切割装置,所述的控制单元为plc,所述的拉绳感应结构为拉绳传感器,所述的物品夹具工装包括推送结构和夹持结构,所述的推送结构为物料推板和连接物料推板的推板气缸,夹持结构为夹板和连接物料夹板的夹板气缸,所述的切割装置为机器人水刀。9.根据权利要求8所述的机器人水刀自适应切割物品的装置及方法,其特征在于:所述的plc为可编程控制器,拉绳传感器通过数据线和无线蓝牙装置连接plc,plc可以实时接收拉绳传感器传输的数据,依据数据计算机器人水刀切割的切割起始点、切割距离、切割间隔。10.根据权利要求8所述的机器人水刀自适应切割物品的装置及方法,其特征在于:所述的机器人水刀设置在机器人水刀自适应切割物品的装置工作界面上,拉绳传感器设置在夹板气缸的外侧。
技术总结
本发明公开了机器人水刀自适应切割物品的装置及方法:入料:推板气缸通过控制系统通电启动将物料推板以及物料推入切割位置;获取数据:夹板气缸通过控制系统通电启动将物料夹板,物料夹板夹住物料,拉绳传感器实时获取夹板位置,夹板实时位置信号传送回plc,在由plc通过profinet通讯自动赋值机器人切割参数;自动切割:机器人水刀自动按设计路径进行切割,设计路径进行切割包括CE方式切割、BE方式切割和AE方式切割。本发明同现有技术相比,通过物品夹具工装和拉绳传感获取所需切割物品位置,通过plc进行自动计算设计出机器人水刀切割的切割起始点(xyz三轴坐标)、切割距离、切割间隔,从而实现机器人水刀自适应切割物品。从而实现机器人水刀自适应切割物品。
技术研发人员:胡立涛 柳新根 孔飞
受保护的技术使用者:银丰生物工程集团有限公司
技术研发日:2021.11.19
技术公布日:2022/2/15