1.本实用新型涉及机械臂技术领域,尤其涉及一种两轴机械臂结构。
背景技术:
2.随着工业技术的不断发展和进步,从手动生产和加工到现在智能化的加工和生产,减少劳动力的消耗,为人们的生活提供稳定的保障和支撑。
3.机械臂是指高精度,多输入多输出、高度非线性、强耦合的复杂系统,因其独特的操作灵活性,已在工业装配、安全防爆等领域得到广泛应用,机械臂是一个复杂系统,存在着参数摄动、外界干扰及未建模动态等不确定性,因而机械臂的建模模型也存在着不确定性,对于不同的任务,需要规划机械臂关节空间的运动轨迹,从而级联构成末端位姿。
4.在现有技术中,机械臂为了满足直线传输和运动,采用书双轴机械臂的结构实现稳定的直线运动,现有的直线传输结构,多采用螺纹丝杆的结构,螺纹丝杆的连接结构在运动时受到外界的作用力时,螺纹连接处易因受力的不同而产生的摩擦不同,导致直线运动的结构易受到磨损。
5.因此,有必要提供一种两轴机械臂结构解决上述技术问题。
技术实现要素:
6.本实用新型提供一种两轴机械臂结构,解决了双轴机械臂直线运动时易受外力作用而增加螺纹驱动部分的磨损的问题。
7.为解决上述技术问题,本实用新型提供的两轴机械臂结构包括:框架;z轴电机,所述z轴电机的底部固定于所述框架内壁的底部,所述z轴电机的输出端固定连接有第一滚珠丝杆;x轴滑台,所述x轴滑台的表面螺纹连接于所述第一滚珠丝杆的表面,所述x轴滑台上开设有连接滑孔;x轴电机,所述x轴电机安装于所述x轴滑台上,所述x轴电机的输出端连接有第二滚珠丝杆,所述第二滚珠丝杆的移动端连接有伸缩台;对接法兰,所述对接法兰的一侧固定于所述伸缩台的表面。
8.优选的,所述第一滚珠丝杆的顶端与所述框架的内壁转动连接,并且第一滚珠丝杆的表面与所述框架的表面平行分布。
9.优选的,所述第二滚珠丝杆的伸缩滑台的表面通过连接滑孔的内部与所述第二滚珠丝杆的移动端连接,并且伸缩滑台的内表面与所述x轴滑台的外表面滑动连接。
10.优选的,所述框架的内部固定连接有限位滑条,所述限位滑条的内表面滑动连接有连接滑块,所述连接滑块的外表面与所述x轴滑台的表面固定连接。
11.优选的,所述x轴滑台上设置有锁定组件,所述锁定组件包括定位盒,所述定位盒上螺纹连接有调节丝杆,所述调节丝杆的底端转动连接有升降滑板,所述升降滑板的底板固定连接有缓冲弹簧,所述缓冲弹簧的底部固定连接有限位卡板。
12.优选的,所述调节丝杆的顶端设置有调节帽,用于调节丝杆的手动调节。
13.优选的,所述升降滑板的表面与所述定位盒的内表面滑动连接,并且升降滑板为
矩形结构,为升降滑板的升降调节提供限位。
14.优选的,所述限位卡板的一侧为弧形面,并且限位卡板的底端贯穿所述定位盒的表面且延伸至所述定位盒的下方。
15.与相关技术相比较,本实用新型提供的两轴机械臂结构具有如下有益效果:
16.本实用新型提供一种两轴机械臂结构,采用滚珠丝杆作为升降和伸缩的动力来源,方便机械臂在z轴和x轴上进行稳定的移动,从而方便对接法兰在不同位置进行对接和使用,满足机械手在不同点位精准的作业需求,伸缩台的表面滑动支撑在x轴滑台上,x轴滑台通过连接滑块和限位滑条将侧向扭转力传递至框架上,降低x轴滑台与第一滚珠丝杆之间连接处的摩擦力,延长设备的使用寿命。
附图说明
17.图1为本实用新型提供的两轴机械臂结构的第一实施例的三维图;
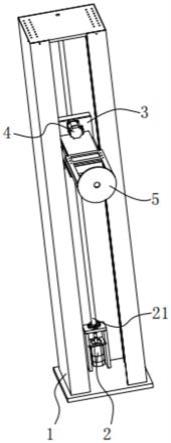
18.图2为图1所示的整体的正视图;
19.图3为图2所示的a-a部的剖视图;
20.图4为图1所示的x轴滑台部分的三维图;
21.图5为图4所示的整体的俯视图;
22.图6为图5所示的b-b部的剖视图;
23.图7为本实用新型提供的两轴机械臂结构的第二实施例的三维图;
24.图8为图7所示的锁定组件的结构示意图。
25.图中标号:
26.1、框架;
27.2、z轴电机,21、第一滚珠丝杆;
28.3、x轴滑台,31、连接滑孔;
29.4、x轴电机,41、第二滚珠丝杆,42、伸缩台;
30.5、对接法兰;
31.6、限位滑条,61、连接滑块;
32.7、锁定组件,71、定位盒,72、调节丝杆,73、升降滑板,74、缓冲弹簧,75、限位卡板。
具体实施方式
33.下面结合附图和实施方式对本实用新型作进一步说明。
34.第一实施例:
35.请结合参阅图1、图2、图3、图4、图5和图6,其中,图1为本实用新型提供的两轴机械臂结构的第一实施例的三维图;图2为图1所示的整体的正视图;图3为图2所示的a-a部的剖视图;图4为图1所示的x轴滑台部分的三维图;图5为图4所示的整体的俯视图;
36.图6为图5所示的b-b部的剖视图。
37.一种两轴机械臂结构包括:框架1;z轴电机2,所述z轴电机2的底部固定于所述框架1内壁的底部,所述z轴电机2的输出端固定连接有第一滚珠丝杆21;x轴滑台3,所述x轴滑台3的表面螺纹连接于所述第一滚珠丝杆21的表面,所述x轴滑台3上开设有连接滑孔31;x轴电机4,所述x轴电机4安装于所述x轴滑台3上,所述x轴电机4的输出端连接有第二滚珠丝
杆41,所述第二滚珠丝杆41的移动端连接有伸缩滑台42;对接法兰5,所述对接法兰5的一侧固定于所述伸缩滑台42的表面。
38.设备主要由x轴伺服运动机构和z轴伺服运动机构组成;
39.其中x轴伺服运动机构由x轴电机4、第二滚珠丝杆41、伸缩滑台42和对接法兰5,并且x轴伺服运动机构安装在z轴伺服运动机构上,为对接法兰5提供水平伸缩调节的动力来源;
40.z轴伺服运动机构由z轴电机2、第一滚珠丝杆21和x轴滑台3,z轴电机2为伺服电机,使用时连接外界的电源,为x轴伺服运动机构提供升降调节的动力来源。
41.所述第一滚珠丝杆21的顶端与所述框架1的内壁转动连接,并且第一滚珠丝杆21的表面与所述框架1的表面平行分布。
42.z轴伺服运动机构的z轴总高2.76米,最大行程2.1米;
43.最大离地高度2.5米,最大速度10米/分钟。
44.z轴电机2采用1kw松下伺服电机,额定输出扭矩为4.77nm,额定提升力可达540kg;
45.采用hgh30ha四滑块式导轨结构,最大可受侧向扭矩3400nm。
46.x轴电机4最大行程300毫米,最大速度15米/分钟。
47.采用750w松下伺服电机,额定推力为2680n,最大推力可达7900n。
48.采用hgh25ha两滑块式导轨结构,最大可受侧向扭矩1760nm
49.所述第二滚珠丝杆41的伸缩滑台42的表面通过连接滑孔31的内部与所述第二滚珠丝杆41的移动端连接,并且伸缩滑台42的内表面与所述x轴滑台3的外表面滑动连接。
50.所述框架1的内部固定连接有限位滑条6,所述限位滑条6的内表面滑动连接有连接滑块61,所述连接滑块61的外表面与所述x轴滑台3的表面固定连接。
51.在x轴滑台3进行升降调节时,x轴滑台3通过连接滑块61方便在限位滑条6的表面上进行上下滑动,保障x轴滑台3升降调节时的稳定性,降低x轴滑台3与第一滚珠丝杆21之间的摩擦力。
52.本实用新型提供的两轴机械臂结构的工作原理如下:
53.当需要对x轴滑台3的升降位置进行调节时,启动z轴电机2,z轴电机2通过第一滚珠丝杆21带动x轴滑台3稳定的升降调节,从而保障x轴滑台3能够稳定的直线运动;
54.当需要将对接法兰5进行伸缩调节时,启动x轴电机4,x轴电机4带动第二滚珠丝杆41转动,第二滚珠丝杆41转动时移动端带动伸缩滑台42同步移动,伸缩滑台42移动时同步带动对接法兰5伸缩调节,以便于对接法兰5精准的对接调控。
55.与相关技术相比较,本实用新型提供的两轴机械臂结构具有如下有益效果:
56.采用滚珠丝杆作为升降和伸缩的动力来源,方便机械臂在z轴和x轴上进行稳定的移动,从而方便对接法兰5在不同位置进行对接和使用,满足机械手在不同点位精准的作业需求,伸缩滑台42的表面滑动支撑在x轴滑台3上,x轴滑台3通过连接滑块61和限位滑条6将侧向扭转力传递至框架1上,降低x轴滑台3与第一滚珠丝杆21之间连接处的摩擦力,延长设备的使用寿命。
57.第二实施例:
58.请参阅图7和图8,基于本技术的第一实施例提供的一种两轴机械臂结构,本技术的第二实施例提出另一种两轴机械臂结构。第二实施例仅仅是第一实施例优选的方式,第
二实施例的实施对第一实施例的单独实施不会造成影响。
59.具体的,本技术的第二实施例提供的两轴机械臂结构的不同之处在于,两轴机械臂结构,还包括:
60.所述x轴滑台3上设置有锁定组件7,所述锁定组件7包括定位盒71,所述定位盒71上螺纹连接有调节丝杆72,所述调节丝杆72的底端转动连接有升降滑板73,所述升降滑板73的底板固定连接有缓冲弹簧74,所述缓冲弹簧74的底部固定连接有限位卡板75。
61.调节丝杆72的表面与定位盒71的表面螺纹连接,在调节丝杆72转动的过程中能够同步带动升降滑板73进行升降调节,升降滑板73的表面与定位盒71的内表面只能上下滑动,并且升降滑板73上下滑动时通过缓冲弹簧74能够拉动限位卡板75同步上下移动;
62.限位卡板75上下移动调节时方便对限位卡板75的使用状态进行调节,当限位卡板75向下移动且与x轴滑台3的表面接触时,限位卡板75通知在当前的位置;
63.在伸缩滑台42的表面回缩时,伸缩滑台42的表面优先与限位卡板75的弧形面接触,使得限位卡板75向上移动,伸缩滑台42上设置有对接卡孔,当对接卡孔移动至限位卡板75的正下方时,限位卡板75在缓冲弹簧74的弹性压力作用下向下移动,同时限位卡板75通过对接孔对伸缩滑台42进行锁定和限位,避免误操作而导致伸缩滑台42的伸展,为伸缩滑台42提供安全锁定结构;
64.当不需要锁定时,只需要手动旋转调节丝杆72,调节丝杆72向上转动且带动升降滑板73向上滑动,升降滑板73向上移动时通过缓冲弹簧74带动限位卡板75向上移动,从而方便对限位卡板75与伸缩滑台42之间脱离锁定。
65.所述调节丝杆72的顶端设置有调节帽,用于调节丝杆72的手动调节。
66.所述升降滑板73的表面与所述定位盒71的内表面滑动连接,并且升降滑板73为矩形结构,为升降滑板73的升降调节提供限位。
67.所述限位卡板75的一侧为弧形面,并且限位卡板75的底端贯穿所述定位盒71的表面且延伸至所述定位盒71的下方。
68.有益效果:
69.通过在伸缩滑台42的形成范围内设置锁定结构,方便对伸缩滑台42不使用时收缩且锁定,避免设备的误操作而导致伸缩滑台42不在控制范围内伸缩,保障伸缩滑台42不使用时的稳定性,避免伸缩滑台42的误操作。
70.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本实用新型的专利保护范围内。