1.本发明涉及一种用于工业操纵器的抓持器。
背景技术:
2.在工业自动化领域中,已知使用自动化操纵器,该操纵器通常具有与其结合以抓持待操纵的物体的抓持器。
3.用于工业操纵器的抓持器通常设置有安装在抓持器主体上的两个或更多个夹爪或抓持器指状件。夹爪可以在打开位置或释放位置与闭合位置或抓持位置之间彼此远离或靠近地运动,在打开位置或释放位置位置,它们不向待操纵的工件施加任何压力,在闭合位置或抓持位置,它们向待操纵的工件施加足够的压力,以确保工件在搬运过程中不会意外释放。
4.取决于夹爪运动的类型,区分为线性抓持器和角式抓持器,在线性抓持器中,夹爪在它们各自的导向件中或其上线性运动,在角式抓持器中,夹爪围绕各自的枢转轴线枢转。
5.夹爪借助于容纳在抓持器主体内的通常是气动、液压或电动类型的致动装置运动。
6.抓持器有时配备有通常是磁性类型的传感器,其功能是产生指示夹爪之间有无工件的电信号。通过使用传感器,可以区分抓持器尚未拾取待搬运的工件或工件意外掉落的情况。目前已知两种构型。
7.在用在气动抓持器上的第一构型中,磁性元件安装于在抓持器主体内部运动的空气活塞上,并且特殊传感器检测磁性元件的位置,从而间接检测空气活塞的位置。当工件正确插入抓持器夹爪之间时,空气活塞不会到达其行程的末端,这正是因为夹爪无法运动靠近而超过由夹持在它们之间的工件限定的容积。当工件意外从夹爪释放或未被拾取时,夹爪可以完全相互闭合,并且空气活塞到达各自的限位止挡件;在这种情况下,由磁传感器生成的信号生成警报。
8.这种解决方案的一个局限性是需要使用比标准传感器更昂贵的低滞后磁传感器或模拟传感器,否则传感器读数的准确性将不足以区分空气活塞的微小运动。事实上,标准的、廉价的、常用的磁传感器是数字传感器,它们只有在检测到的磁场的通量强度超过阈值(例如25高斯)时才会生成信号,并在磁场的通量强度降低到更低的阈值(例如20高斯)以下时关闭。这种滞后导致标准磁传感器不是很准确(它们需要传感器的磁性元件具有长行程)。这就是采用更昂贵的低滞后磁传感器的原因。
9.在主要用于预载抓持器的第二构型中,磁传感器定位在其中一个夹爪上,即正好在其中一个夹爪上,使得待搬运的工件保持被夹持在磁传感器与相对的夹爪之间。在这种情况下,磁传感器被制造成具有相对于相应夹爪固定的部分和可相对于该固定部分运动的部分。当抓持器拾取工件时,磁传感器的可动部分被推向固定部分,并且传感器生成相应的电信号;当夹爪张开并松开工件时,磁传感器的可动部分在弹性元件的推力下远离固定部
分运动。
10.该解决方案的缺点是将磁传感器安装在夹爪上,使得磁传感器限制了夹爪周围的可用空间,特别是限制了抓持器的打开角度。另外,由于磁传感器位于夹爪上并面向相对的夹爪,因此抓持器不对称,并且这可能会给装配了抓持器的机械臂编程带来困难,因为在拾取和松开工件时必须考虑磁传感器的尺寸。
11.jp 2009 172735描述了一种专用于搬运工件的抓持器,其设置有检测弹簧变形的传感器,以分辨夹爪之间是否存在工件;当夹爪对工件施加压力时,弹簧被压缩。
12.us 2017/182668描述了一种用于保持板材或片材的气动抓持器。致动器是空气活塞,空气活塞借助于凸轮型传动机构使夹爪运动。传动机构处设有电子传感器,以检测夹爪的位置并区分板材是已被夹住还是板材不在夹爪之间的状态。
13.us 2018/207807描述了一种专门设计用于搬运皮氏培养皿(即具有彼此全部相等的预定直径的工件)的电动抓持器。抓持器包括防止对皮氏培养皿施加过大的力的补偿机构。光学传感器预先设置在补偿机构和夹爪处,以便检测夹爪之间是否存在皮氏培养皿。
14.jp 3 825449描述了一种抓持器,其中传感器位于夹爪上(第28段,图3,光学传感器43和44)。
15.us 6,145,904和us 2009/127879描述了本领域中已知的气动操作且具有平行夹爪的抓持器。
技术实现要素:
16.本发明的目的是提供一种用于工业操纵器的抓持器,该抓持器设置有传感器以检测夹爪之间有无工件,其不仅克服了传统解决方案的缺点而且制造简单。
17.因此,本发明的第一方面涉及根据权利要求1的抓持器。
18.更具体而言,抓持器包括主体、被约束到主体上并且能够被致动以保持和松开工件的夹爪、夹爪的致动器和配置成检测所述夹爪之间有无工件的传感器。有利地,传感器不是在旨在容纳待保持的工件的空间中定位在夹爪之间,而是在功能上插置在致动器与其中一个夹爪之间。
19.换句话说,在根据本发明的抓持器中,传感器不是位于夹爪的下游,而是位于它们的上游,特别是位于夹爪与致动器之间。
[0020]“在功能上插置”的表达具有以下含义:无论相对于抓持器的其它部件物理上所处的位置如何,传感器都在夹爪与致动器之间执行其功能,即它在夹爪与致动器之间相互作用,而不是在两个夹爪之间或在夹爪与待拾取的工件之间相互作用。
[0021]
这种构型提供了以下优点。
[0022]
首先,传感器不会占用夹爪之间的空间:节省的(未占用的)空间可用于拾取和保持工件。另外,对于待保持的某个工件,可以更快地打开和闭合夹爪。
[0023]
另一个优点是,抓持器可以制造成使得被拾取的工件基本上与夹爪等距地保持保持平面上,即抓持器的中心线上,从而有利于工业操纵器的作业。
[0024]
另一个优点是,传感器不会接触到也可能很热或很脏的被拾取工件,因此从长远来看,这会延长传感器的使用寿命。
[0025]
所提出的解决方案可以很容易地以低成本在角式抓持器和具有平行夹爪的抓持
器上实施。
[0026]
优选地,夹爪包括旨在保持工件的远端和相对的近端或肩部,近端或肩部能够通过致动器相对于彼此运动。致动器作用在至少一个夹爪的近端上(例如,夹爪可以是固定的,或者所有夹爪都是可动的)。传感器在功能上插置在致动器与这些夹爪中的一个夹爪的近端之间,例如,它配置成生成指示夹爪近端相对于致动器的位置的信号,该信号还指示夹爪之间是否存在工件。
[0027]
优选地,传感器属于磁类型的并且又包括磁性元件和用于例如基于霍尔效应来检测磁性元件的电子电路。电子电路与夹爪固定在一起,并且磁性元件能够响应于致动器施加的应力而相对于电子电路运动。
[0028]
在一个实施例中,电子电路装配到夹爪的近端处,并且磁性元件装配到致动器上,例如装配到线性致动器的空气活塞或杆上,并且响应于装配有传感器的夹爪所施加的应力并且特别是响应于当致动器被致动时该夹爪所施加的应力而能够与致动器一起相对于电子电路在第一位置与第二位置之间运动,在第一位置,磁性元件距电子电路的距离最大,在第二位置,磁性元件距电子电路的距离最小。
[0029]
在一替换实施例中,电子电路在夹爪的近端处装配到夹爪上,并且磁性元件装配到专用元件上,该专用元件插置在电子电路与致动器之间,并且响应于装配有传感器的夹爪所施加的应力而能够在第一位置与第二位置之间运动,在第一位置,磁性元件距电子电路的距离最大,在第二位置,磁性元件距电子电路的距离最小。
[0030]
优选地,磁性元件距电子电路的最小距离位置对应于夹爪的工件抓持位置,即对应于工件被保持在夹爪之间的状态。因此,当电子电路检测到磁性元件处于第二位置时,即处于最小距离时,它生成确认工件被抓持器正确保持的信号;当电子电路检测到磁性元件移开时,生成对应于另一种状态的信号,例如对应于夹爪的打开或闭合位置,但没有被抓持的工件,或者不生成信号。
[0031]
优选地,磁性元件布置成可相对于相应的夹爪运动,使得:
[0032]-在夹爪的闭合运动期间,磁性元件不相对于相应夹爪转动,并且磁性元件与电子电路之间的距离不改变而是保持恒定,直至夹爪均与待拾取的工件抵接的位置。在这种情况下,传感器不会生成工件已被抓持的信号;
[0033]-随后,当夹爪靠近待拾取的工件并且致动器施加将工件锁定在夹爪之间所需的推力时,磁性元件和相应的夹爪相对于彼此转动,并且磁性元件与电子电路之间的距离减小,在某些情况下达到零,即达到磁性元件抵接电子电路的位置。在这种情况下,传感器生成工件已被抓持的信号。
[0034]
这样,可以使用不必属于低滞后类型的经济型传感器,而不会有在抓持器操作期间生成假正信号(即在工件实际上不在夹爪之间时表示工件已被抓持的信号)的风险。
[0035]
例如,传感器包括第一部分和其中容纳磁性元件的第二部分,所述第一部分限定用于电子电路的容纳部,例如电子电路可以定位在其中以便可以调整位置的容纳部。另外,传感器包括插置在第一部分与第二部分之间的弹性元件;第二部分响应于装配有传感器的夹爪所施加的应力而能够相对于第一部分运动,并且弹性元件在致动器上施加反作用力。
[0036]
更优选地,传感器的第一部分与夹爪固定在一起或与其制造成一体,第二部分铰接到第一部分上并且能够相对于后者转动,或者它由于致动器被致动时由同一夹爪施加的
应力并由于弹性元件所施加的反作用力而摆动。
[0037]
例如,传感器的第一部分在相应的近端处固定到夹爪上,并且同一夹爪迫使第二部分相对于第一部分转动。当工件被保持在夹爪之间时,第一部分与第二部分之间的夹角最小,并且弹性元件被压缩。
[0038]
优选地,传感器的第二部分是抵接致动器的一部分的滑块。致动器可运动并作用在滑块上,从而在其上施加推力。
[0039]
一般而言,致动器可以是气动的、液压的或电动的。
[0040]
优选地,一般而言,磁性元件相对于相应电子检测电路的位置取决于装配有传感器的夹爪的位置以及致动器的位置,装配有传感器的夹爪的位置又取决于可保持在夹爪之间的工件的尺寸。
[0041]
申请人保留为其中传感器属于气动类型的本发明的替换实施例提交分案专利申请的权利。在这种情况下,传感器包括:
[0042]-管道,该管道在抓持器夹爪与致动器之间打开并提供与外部低压或真空源的流体连通,该外部低压或真空源也可以位于远程位置并通过橡胶软管连接到传感器,其中可以预先布置用于检测传感器中的压力值(即低压值)的仪器;和
[0043]-遮蔽器,该遮蔽器能够响应于装配有传感器的同一夹爪所施加的应力而在管道的打开位置和闭合位置之间运动。
[0044]
优选地,气动传感器包括第一部分,该第一部分可以在夹爪的近侧部分或肩部处被约束到夹爪上。管道被限定在第一部分中。传感器还包括第二部分,该第二部分被约束到第一部分上并且响应于装配有传感器的第一部分的同一夹爪所施加的应力而相对于第一部分在打开位置与闭合位置之间运动。
[0045]
例如,传感器的第二部分铰接到第一部分上并且可相对于第一部分在打开位置与闭合位置之间转动,这取决于第一部分装配到其上的夹爪的角位置。
[0046]
本实施例的操作很简单:当夹爪闭合而没有拾取工件p时,传感器管道没有被遮蔽器封闭,并且在管道本身中检测到第一低压值;另一方面,当工件被保持夹爪之间时,遮蔽器封闭传感器管道,并且在管道本身中检测到大于第一低压值的第二低压值。由于对管道中的压力(低压)差的检测,可以区分工件已被夹住和工件错过的状况。
[0047]
在该优选实施例中,致动器包括至少一个空气活塞,在供应到缸中的加压流体和弹性复位元件的作用下,该空气活塞可在限定于抓持器主体中的相应缸中沿着纵向方向交替运动。
[0048]
根据本发明的抓持器可以是角式抓持器,在这种情况下,夹爪可在销上枢转,并且每个夹爪都包括用于保持工件的远端和致动器在其上施加致动器自身的推力的近端或肩部。远端关于销与近端相对,并且夹爪在打开位置、闭合位置和夹爪在抓持工件时的位置之间摆动,在所述打开位置,远端张开并且近端靠近,在所述闭合位置,远端靠近或抵接,远端张开,并且夹爪在抓持工件时的位置在打开位置和闭合位置的中间。
[0049]
根据本发明的抓持器可以是具有平行夹爪的抓持器,并且在这种情况下,至少一个夹爪可以沿着导向件平移并且包括在销上摆动的相应摆臂,所述摆臂使夹爪在导向件上移位。夹爪的近端由相应的摆臂限定,并且传感器在功能上插置在致动器与所述摆臂之间。
[0050]
一般而言,抓持器可以具有一个固定夹爪和单个可动夹爪、两个可动夹爪、三个可
动夹爪等。
[0051]
致动器优选地包括至少一个空气活塞,该空气活塞可以插在夹爪的近端之间或在其间运动以将它们张开。可替换地,致动器是液压的或电动的。
[0052]
本发明的另一目的是,提供一种用于检测用于工业操纵器的抓持器的夹爪之间有无工件的方法,该方法克服了传统解决方案的缺点。
[0053]
因此,本发明的第二方面涉及根据权利要求20所述的方法。
[0054]
更具体而言,该方法包括:
[0055]-提供抓持器,该抓持器配备有主体、被约束到主体上并能够被致动以保持和松开工件的夹爪、夹爪的致动器以及传感器,
[0056]-借助于致动器使夹爪在打开位置、闭合位置和用于拾取和保持工件的工件抓持位置之间运动,
[0057]-借助于传感器生成指示工件已被正确抓持的信号。
[0058]
有利地,为了实现以上关于抓持器描述的优点,即,区分工件是否已被抓持,传感器检测(至少)一个夹爪相对于致动器的位置。
[0059]
在实践中,传感器在功能上插置在致动器和所述夹爪中的一个夹爪之间,并在所述一个夹爪相对于致动器的位置对应于被正确抓持的工件时生成信号。
[0060]
当致动器工作时,即,当致动器处于与闭合的夹爪相对应的位置时,传感器检测所述一个夹爪与夹爪的闭合位置的偏差;偏差是由夹爪之间的工件引起的。
附图说明
[0061]
通过查阅以下借助于附图对仅出于说明性目的且非限制性地示出的优选但非排它的实施例的说明,本发明的更多特征和优点将更加明显,在附图中:
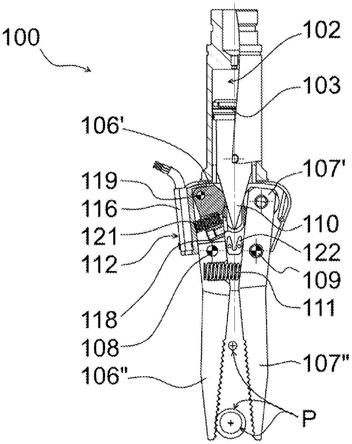
[0062]-图1是根据本发明的用于工业操纵器的抓持器的第一实施例的透视图;
[0063]-图2是图1所示的抓持器的局部剖视透视图,该抓持器的夹爪是打开的;
[0064]-图2a是图1所示的抓持器的局部剖视透视图,该抓持器的夹爪正在闭合;
[0065]-图3是图1所示的抓持器的局部剖视正视图,该抓持器的夹爪完全闭合;
[0066]-图4a是图1所示的抓持器的局部剖视正视图,该抓持器的夹爪靠在待搬运的第一工件上闭合;
[0067]-图4b是图1所示的抓持器的局部剖视正视图,该抓持器的夹爪靠在待搬运的第二工件上闭合;
[0068]-图4c是图1所示的抓持器的局部剖视正视图,该抓持器的夹爪靠在待搬运的第三工件上闭合;
[0069]-图5是图1所示的抓持器的透视分解图,该抓持器的夹爪是打开的;
[0070]-图6是根据本发明的用于工业操纵器的抓持器的第二实施例的透视图;
[0071]-图7是图6所示的抓持器的局部剖视正视图,该抓持器的夹爪完全闭合;
[0072]-图8是图6所示的抓持器的局部剖视正视图,该抓持器的夹爪靠在待搬运的工件上闭合;
[0073]-图9是图6所示的抓持器的透视分解图,该抓持器的夹爪是打开的;
[0074]-图10是图6所示的抓持器的细节的透视图;
[0075]-图11是根据本发明的用于工业操纵器的抓持器的第三实施例的透视图;
[0076]-图12是图11所示的抓持器的局部剖视透视图,该抓持器的夹爪是打开的;
[0077]-图13是图11所示的抓持器的局部剖视正视图,该抓持器的夹爪完全闭合;
[0078]-图14是图11所示的抓持器的局部剖视正视图,该抓持器的夹爪靠在待搬运的工件上闭合;
[0079]-图15是图11所示的抓持器的透视分解图;
[0080]-图16是根据本发明的用于工业操纵器的抓持器的第四实施例的纵剖视图,该抓持器的夹爪完全打开;
[0081]-图17是图16所示的抓持器的纵剖视图,该抓持器的夹爪完全闭合;
[0082]-图18是图16所示的抓持器的纵剖视图,该抓持器的夹爪靠在待搬运的工件上闭合;
[0083]-图19是图16所示的抓持器的透视图,该抓持器的夹爪是打开的;
[0084]-图20是图16所示的抓持器的分解图;
[0085]-图21是根据本发明的用于工业操纵器的抓持器的第五实施例的透视图;
[0086]-图22是图21所示的抓持器的局部剖视透视图,该抓持器的夹爪是打开的;
[0087]-图23是图21所示的抓持器的局部剖视正视图,该抓持器的夹爪完全闭合;
[0088]-图24是图21所示的抓持器的局部剖视正视图,该抓持器的夹爪靠在待搬运的工件上闭合;
[0089]-图25是图21所示的抓持器的透视分解图。
具体实施方式
[0090]
图1-5示出了根据本发明的用于工业操纵器的抓持器的第一实施例100。
[0091]
抓持器100包括主体101,在主体101内部限定有缸102,根据典型的缸-活塞联接,空气活塞103可在缸102内运动。压缩空气经喷嘴105供应。抓持器包括两个夹爪106和107,它们通过销108和109装配到主体上,以便能够在打开位置与闭合位置之间枢转,在打开位置,夹爪106、107如图1、2和5所示张开,在闭合位置,夹爪106、107如图3所示彼此抵接。图4示出了打开位置与闭合位置之间的中间位置,该中间位置可以定义为工件抓持位置,其中夹爪106、107稍微张开并紧靠待搬运的工件p闭合。
[0092]
夹爪106、107的闭合运动是由活塞103引起的,活塞103具有楔形部分110,当压缩空气经喷嘴105供应并且活塞103朝向缸102的最靠近夹爪106、107本身的端部运动(即它朝向可称为闭合死点的位置运动)时,楔形部分110进入夹爪106、107之间。确切地说,为了实现闭合,夹爪106、107在相对于具有拾取和保持工件p的功能的远端106
″
和107
″
的相对侧配备有从相应的销108、109朝向活塞103的楔形部分110延伸的肩部106
′
和107
′
(其也可以定义为近端)。
[0093]
弹性元件111如弹簧或橡胶元件插在夹爪106、107之间,以在活塞103返回其初始位置时、即在压缩空气供应暂停时使抓持器自动打开。弹簧111施加推力,该推力倾向于使夹爪106、107的远端106
″
和107
″
张开,即,当由活塞103的楔形部分110施加的推力停止时,它倾向于使夹爪106、107返回到打开位置。
[0094]
在图中所示的示例中,弹簧111沿着与活塞103移位的纵向方向正交的方向作用。
[0095]
抓持器100包括整体由标号112表示的传感器,该传感器的功能是生成指示夹爪106、107在任何给定时刻所处的位置的电信号。与本领域中已知的解决方案不同,在抓持器100中,传感器112不是定位在活塞103上或夹爪106、107的其中一个的远端106
′
、107
′
上;传感器112在功能上插置在活塞103与夹爪106、107的其中一个之间,特别是在活塞103的楔形部分110与夹爪106、107的其中一个的肩部106
′
、107
′
之间。
[0096]
在图1-5所示的例子中,传感器112插置在活塞103的楔形部分110与夹爪106的肩部106
′
之间。
[0097]
传感器112属于磁类型的,现在将详细描述其结构和操作。
[0098]
来看图5,传感器112包括第一部分113,该第一部分113旨在固定到夹爪106的肩部106
′
以便相对于夹爪106固定;换言之,传感器112的第一部分113旨在与肩部106
′
一起相对于销108转动。在所示示例中,传感器112的第一部分113具有卡入在夹爪106的肩部106
′
上获得的相应孔115中的突起114。
[0099]
在传感器112的部分113上有能够通过霍尔效应检测给定距离处有无磁性元件的电子电路116。为了给电子电路116供电并收集由传感器112生成的电信号,提供了配线117。
[0100]
传感器112还包括可以定义为滑块的第二部分118,由于销119穿过夹爪106的肩部106
′
并穿过传感器112的第一部分113和第二部分118两者,第二部分118被可枢转地约束到第一部分113上。换言之,传感器112的第二部分118借助于销119铰接到第一部分113上。
[0101]
由于这种构型,第二部分118可相对于第一部分113并因此也相对于夹爪106的肩部106
′
在远端位置与近端位置之间运动,远端位置对应于两个部分113和118之间的最大可能角度,近端位置对应于两个部分之间的最小可能角度。
[0102]
如图5中最佳所示,形状像丸粒的磁性元件120容纳在第二部分118中的专用座120
′
中。由于磁性元件120与第二部分118一起运动,因此通过装配在传感器112的第一部分113上的电子电路116检测磁性元件120的位置对应于间接测量第二部分118的角位置,该角位置又单一地取决于在检测时夹爪106所处的位置。第二部分118总是抵接活塞103的楔形部分110,从而用作相应表面上的滑块,并且因此传感器112的第二部分118优选地具有倒圆表面以有利于活塞103在楔形部分110上的滑动。
[0103]
优选为弹簧的弹性元件121在功能性上插置在传感器112的两个部分113和118之间,以便不断施加趋于使第二部分118远离第一部分113运动的推力。正是活塞103在朝向相应的闭合死点运动时通过在夹爪106和107的肩部106
′
和107
′
之间开槽来抵抗弹簧121的作用,从而限制第二部分118相对于传感器112的第一部分113的相对运动。
[0104]
换言之,当抓持器100被致动并且活塞103被压缩空气推动时,活塞103本身在传感器112的第二部分118上施加推力,从而抵抗弹簧121施加的力。如果工件p被抓持,则夹爪106所处的新角位置使第二部分118在销119上枢转并且部分113和118之间的夹角相应地减小;在这种情况下,电子电路116检测到磁性元件120的接近。当达到磁性元件120的给定相对位置时,即当电子电路116检测到由磁性元件120生成的磁场的通量强度达到实际上对应于传感器112的部分118的单一角位置并因此对应于工件已被抓取的情况的阈值时,传感器112生成相应的信号。
[0105]
如果抓持器100意外丢落了工件p,或者后者根本没有被抓持,则活塞103抵靠在限位止挡件122(闭合死点)上,而不会导致弹性元件121被压缩,因此不会生成对应于工件p已
被成功抓持的信号。例如,在图4中,活塞103的部分110不与限位止挡件122抵接,与图3所示相反。
[0106]
特别地,图2示出了夹爪106、107完全打开的抓持器100:传感器112的第二部分118和第一部分113之间的夹角最大并且磁性元件120距电子电路116的距离最大。图3示出夹爪106、107完全闭合的抓持器100:传感器112的第二部分118和第一部分113之间的夹角最大并且磁性元件120距电子电路116的距离最大。图4示出了夹爪106、107处于抓持工件p的中间抓持位置的抓持器100:传感器112的第二部分118和第一部分113之间的夹角最小,并且磁性元件120恰好由于夹爪106从闭合位置的角位移而处于最靠近电子电路116的位置。
[0107]
通过采用刚刚描述的解决方案,工业操纵器能够准确无误地确定工件p可能已经掉落或尚未被抓持。在这两种情况下,传感器112的许可失效并且操纵器停止,即抓持器100停止。
[0108]
所描述的解决方案提供了几个优点。
[0109]
首先,夹爪106、107周围的空间保持完全自由:传感器112未被装配到夹爪106、107的远端106
″
或107
″
,即它没有装配到夹爪106、107的必须与待搬运的工件p相互作用的部分上。这样,可以更好地利用抓持器100。
[0110]
其次,由于夹爪106、107的远端106
″
或107
″
之间没有传感器112,抓持器100是对称的,因为夹爪106和107是对称的并且相对于抓持器100的纵向轴线以类似镜像的方式运动,其中,在搬运期间沿着该纵向轴线保持工件p。
[0111]
另一个优点是传感器112可以用便宜的部件制成:事实上,传感器112不需要属于低滞后或模拟类型的,因为传感器112的操作也是基于弹性元件121的有无。更具体而言,弹簧模量121被选择为使得仅在抓持器100抓持工件p的情况下弹簧121才能被压缩;如果抓持器100由于误差而没有拾取工件,则弹簧121不会被压缩。
[0112]
将参考图2、2a、3和4a-4c描述夹爪106、107在工件上的闭合运动,设想抓持器100必须拾取具有圆形截面但分别具有不同直径的三个工件p
′
、p
″
和p
″′
的情况。
[0113]
例如,首先,当拾取工件p的命令到达抓持器100时,该抓持器的夹爪106、107可以打开,如图2所示,或者夹爪106、107可以闭合,如图3所示。
[0114]
应当注意的是,在夹爪106、107的闭合运动期间,从图2所示的位置开始,只要夹爪没有在工件p上闭合,传感器112的第二部分118和第一部分113之间的夹角就最大,并且磁性元件120位于距电子电路116最远的位置。
[0115]
换言之,在夹爪106、107的闭合运动期间,只要夹爪不都抵接在待搬运的工件p上,传感器112的第二部分118(即滑块)就与夹爪106一起运动,即这些元件不会在销119上相对于彼此枢转。
[0116]
这种行为是由于只要不超过弹性元件121的预置载荷,传感器的第二部分118就不能通过活塞103的楔形部分110相对于夹爪106在销119上转动;这种超出状况仅在夹爪106、107运动以抓持工件p并且活塞103的楔形部分110沿对应于夹爪106和107的部分106
′
和107
′
张开的方向进一步运动时出现。
[0117]
这样,即通过在夹爪106和107夹持工件p之前防止传感器112的第二部分118相对于夹爪106的相对转动,磁性元件120保持远离传感器112。这种情况是有利的,因为虽然采用了不必属于低滞后类型的便宜传感器112,但避免了假正信号。
[0118]
图2a示出了当夹爪106、107正在运动以在工件p(示意性地示出了三个不同直径的工件p)上闭合时的抓持器100:在闭合运动期间,传感器112的第二部分118和第一部分113之间的夹角保持恒定,并且优选地等于最大值,直到夹爪在工件p上闭合的位置,并且此后,只要传感器112的第二部分118转动并且到达对应于磁体120刚好抵接传感器112并且对应于零角度的限位止挡件,所述角度就减小。
[0119]
图4a-4c分别示出了抓持器100的夹爪106、107(特别是部分106
″
和107
″
)在小直径工件p
′
、中直径工件p
″
和大直径工件p
″′
上闭合。
[0120]
可以看出,在所有三种情况中,传感器112的第二部分118和第一部分113之间存在零角度:磁体120抵接传感器并且生成工件已被抓持的信号,即指示工件p
′
、p
″
、p
″′
被封闭在夹爪106、107之间的信号。
[0121]
由于首先夹爪106和传感器112的第二部分118一起运动,然后它们相对于彼此转动,因此无论工件p
′
、p
″
、p
″′
的直径如何,传感器112都可以获得总是正确的信号,而没有假正信号。
[0122]
图6-9示出了与第一实施例100相当的根据本发明的抓持器的第二实施例200。同样,在该结构变型中,两个夹爪206和207响应于空气活塞203施加的应力而相对于主体201在各自的销208、209上摆动,该空气活塞203用作致动器并交替地沿纵向方向在主体201中的缸202内运动。
[0123]
在活塞203相对于销208、209的相对侧,基本上是预加载弹簧的弹性元件211插置在两个夹爪206、207之间,以在活塞203在气缸202中回移时使夹爪206、207到达打开位置。换言之,弹簧211在夹爪206、207的远端206
″
和207
″
上施加推力以将它们张开,并且活塞203借助于楔形部分210在夹爪206、207的肩部206
′
和207
′
上施加推力,楔形部分210刚好在肩部206
′
和207
′
之间滑动以将它们张开,从而抵抗由弹簧211施加的力。
[0124]
传感器212包括可以固定到夹爪206的肩部206
′
上的第一部分213和借助于销219铰接到第一部分213上的第二部分218。弹性元件221、优选弹簧插置在传感器212的两个部分213和218之间。在图9中可以看到的磁性元件220插入传感器的第二部分218中;用于检测磁性元件220的电子电路216装配到传感器212的第一部分213。
[0125]
第二部分218具有旨在像滑块一样与活塞203的楔形部分210相互作用的倒圆部分。活塞203的往复运动限制了传感器212的第二部分218相对于第一部分213的转动。
[0126]
当夹爪206、207处于图7所示的闭合位置时,活塞203的楔形部分210停靠在限位止挡件222上。另一方面,在图8所示的工件p的抓持位置,活塞203的楔形部分210不接触限位止挡件222。
[0127]
在图6中,示出了抓持器200的夹爪206和207由于弹簧211施加的推力而打开。在图7中,示出了抓持器200的夹爪206和207由于活塞203施加的推力而闭合。在图8中,示出了抓持器200的夹爪206和207处于工件p的抓持位置,即工件p由远端206
″
和207
″
保持。
[0128]
抓持器200的操作类似于上述抓持器100的操作。
[0129]
图10是抓持器200的夹爪206和传感器212的透视分解图。可以看出,传感器212的第一部分213设置有槽213
′
,电子电路216(为简单起见在图10中未示出)可滑动地插入槽213
′
中,电子电路216的最终位置可以调整和锁定。第一部分213被穿孔以允许销219沿着平行于销208和209的轴线插入。夹爪206的肩部206
′
的形状像叉子并且也穿设有彼此面对的
孔215,并且设置在传感器212的第一部分213的侧面上的弹性突起214卡入这些孔中。孔218
′
穿过传感器212的第二部分218,以容纳销219并允许实现与第一部分213的铰链联接。在第二部分218上设置有分别容纳弹簧221和磁性元件220的两个座226和223。在传感器212正确地装配在夹爪206的肩部206
′
上时,合适的阻挡表面224防止第一部分213相对于夹爪206的肩部206
′
转动。附图标记225表示传感器212的倒圆部分,特别是第二部分218的倒圆部分,其旨在像滑块一样在活塞213的楔形部分210上运动,从而允许第二部分218在工件p被抓持时响应于夹爪206施加的应力而相对于第一部分213相对转动。
[0130]
在该第二实施例200中,夹爪206、207之间的空间也保持完全自由:传感器212没有装配到夹爪206、207的远端206
″
或207
″
上,即它没有装配到夹爪206、207的必须与待搬运的工件p相互作用的部分上。
[0131]
传感器212也可以由便宜的部件制成,因为不需要低滞后类型的。弹簧模量221被选择为使得只有在抓持器200抓持工件p的情况下弹簧221才能被压缩;如果抓持器200由于误差而没有拾取工件p,则弹簧221不会被压缩并且这种情况由传感器212区分。
[0132]
图11-15示出了抓持器的第三实施例300。它是气动抓持器300,即其致动器是活塞303,活塞303在抓持器300的主体301中限定的缸302内沿着纵向方向运动。与上述抓持器100和200不同,在抓持器300中,夹爪306和307不转动而是相互靠近和远离地平移。换言之,抓持器100和200是角式抓持器,而抓持器300是具有平行夹爪306、307的抓持器。
[0133]
夹爪306、307可以在与抓持器300的主体301固定的专用导向件301
′
上滑动。导向件301
′
正交于活塞303的纵向位移方向定向:活塞303朝向相应的闭合死角点的位移导致夹爪306、307彼此靠近地运动,反之,活塞303远离闭合死点的运动导致夹爪306、307由于弹性元件311施加的力而远离彼此运动。
[0134]
夹爪306、307通过各自的摆臂330、331在导向件301
′
上运动,摆臂330、331在销308和309处枢接至抓持器300的主体301。特别地,摆臂330和331各自包括叶状部分332、333,其装配到相应的夹爪306、307中以在两个平移方向上施加推力。
[0135]
在该实施例300中,夹爪306、307的远端306
″
、307
″
被标识为位于图中所示的导向件301
′
上的滑块中,而近端306
″
、307
″
被标识为位于摆臂330和331中,出于本发明的目的,可以将摆臂330和331视为夹爪306、307的一部分,即使它们不是与夹爪306、307一体形成的。
[0136]
图11以正视透视图示出抓持器300,其中夹爪306、307打开。该图示出了抵抗活塞303的弹簧311、导向件301
′
以及在功能上插置在活塞303与夹爪306的近端306
″
之间的传感器312。图12以局部剖视透视图示出了抓持器300;活塞303处于相应的打开死点(与闭合死点相对),因此它不会通过其楔形部分310在摆臂330、331上施加推力,使得弹簧311保持摆臂330、331张开,并因此保持夹爪306、307打开。图13是处于夹爪306、307完全闭合的构型中的抓持器300的正视(纵向)剖视图;活塞303处于相应的闭合死点,抵接限位止挡件322,并且其楔形部分310插入摆臂330、331之间,以便使摆臂330、331在同一活塞303与销308、309之间的区域中张开。在该构型中,摆臂330、331的叶状部分332、333彼此相距最小距离。图14是处于工件p的抓持位置的构型的抓持器300的正视(纵向)剖视图,即,夹爪306、307从相对于工件p的相对部分抵接待搬运的工件p的构型。
[0137]
考虑到传感器312的第一部分313固定到摆臂330上并且摆臂330也限定夹爪306的
近端306
′
,抓持器300的操作如下。当活塞朝向相应的闭合死点运动时,它抵抗传感器312的第二部分318,从而限制第二部分318在销319上相对于第一部分313的转动,第一部分313相对于摆臂330保持固定不动。插入第一部分313中并固定在其上的电子电路316生成指示磁性元件320相对于电子电路316本身的位置的电信号。当抓持器300被停用时,即当不再向活塞303供应压缩空气时,弹簧321起作用以使第二部分318返回到其初始位置。类似地,当活塞303返回到打开死点时,弹簧311重新打开夹爪306、307。
[0138]
如已经针对抓持器100和200所指出的,同样在抓持器300中,传感器312的两个部分313、318之间的弹簧321有助于使系统有效。事实上,通过比较图13和14,可以推断,在夹爪306、307闭合的状态下,弹簧321不会被压缩或仅被轻微压缩,而在夹爪306、307正在抓持工件p的状态下,弹簧321被压缩。如上所述,弹簧321与电子电路316和磁性元件320配合以允许传感器312无误地检测夹爪306、307之间不存在工件p的情形。事实上,由于所描述的构型,弹簧321仅在其中夹爪306、307实际上拾取了工件p的图14所示的构型中被压缩,否则弹簧321保持不被压缩或仅被部分压缩。原因在于,当工件p被保持时,夹爪306相对于闭合位置转动。因此,通过适当地选择弹簧模量321,例如通过执行测试,可以在不使用低滞后部件的情况下制造传感器312。
[0139]
此外,抓持器300是自定心的,与上述的抓持器100和200一样。图14示出了工件p沿着抓持器300的纵向轴线被保持。
[0140]
图16-20示出了抓持器的第四实施例400。它是具有气动致动器440的角式抓持器,该气动致动器440正交于纵向轴线,工件p沿着该纵向轴线被保持。特别地,图16-18以正视纵剖视图示出了抓持器400,其中夹爪406、407分别打开、闭合和抓持工件p。图19以透视图示出了抓持器400,其中夹爪406、407打开。图20是抓持器400的分解图。
[0141]
更具体而言,夹爪406、407装配到抓持器400的主体401上,以便可在销408、409上枢转,即它们可以摆动。压缩空气经由喷嘴405供应到主体401中。在主体401内部有容积440,该容积440连接到喷嘴405并被分隔成两个相对的腔室441和442,这两个腔室441和442相对于喷嘴405布置在相对两侧并且相应的空气活塞403
′
和403
″
可在其中运动。经喷嘴405注入的压缩空气导致活塞403
′
和403
″
在相应的腔室441和442中彼此远离地运动;活塞403
′
和403
″
可以在相应的腔室441和442中滑动并通过伸缩联接彼此约束。特别地,活塞403
″
具有以滑动方式部分地插在活塞403
′
中的轴。
[0142]
活塞403
′
作用在夹爪406的肩部406
′
上,并且活塞403
″
作用在夹爪407的肩部407
′
上,使得当通过供应压缩空气致动抓持器时,活塞403
′
、403
″
彼此远离地运动并张开夹爪406、407的肩部406
′
、407
′
,从而导致它们在销408、409上转动并且导致相同的夹爪406、407的远端406
″
和407
″
彼此更靠近地运动。如上所述,活塞403
′
、403
″
沿着与抓持器400的纵向轴线正交的方向运动。
[0143]
当抓持器400停用时,弹性元件411(实际上是弹簧)使夹爪406、407返回到图16和19所示的打开位置。弹簧411容纳在抓持器400的主体401中的特殊座中,该座平行于活塞403
′
、403
″
的运动方向定向,但显然关于销408、409彼此相对地布置。
[0144]
抓持器400配备有装配在夹爪407上的传感器412,特别是布置在肩部407
′
上。在图20中,为简单起见,省略了传感器412,但在图16-19中清晰可见。
[0145]
传感器412包括与夹爪407的肩部407
′
制成一体的第一部分413,夹爪407的肩部
407
′
中有配备有led灯指示器450的电子电路416。传感器412的磁性元件420在相应的座中容纳在活塞403
″
中,并且弹簧421在功能上插置在活塞403
″
与夹爪407的肩部407
″
之间。弹簧421由夹爪407的肩部407
′
保持在活塞403
″
上,这防止了弹簧421意外脱出。
[0146]
传感器412的操作如下。在其中夹爪406、407打开的图16所示的抓持器400不工作的初始状态下,弹簧421未被压缩,或仅被轻微压缩,并且磁性元件420与电子电路416相距第一距离。当抓持器400被致动、即向其供应压缩空气时,活塞403
′
和403
″
迫使夹爪406、407进入图17所示的闭合位置:由于活塞403
′
和403
″
到达弹性环436和437上的限位止挡件,因此活塞403
′
、403
″
远离彼此的运动不会导致弹簧421被压缩。
[0147]
换言之,弹性环436和437阻挡活塞403
′
和403
″
,从而在抓持器400无用地闭合的情况下、即在工件p没有被拾取并保持在夹爪406、407之间的情况下防止磁性元件420对电子电路416施加应力。
[0148]
如图18所示,当抓持器400拾取工件p时,弹簧421的压缩补偿工件p的尺寸:在该位置中,抓持器407
″
的肩部407
′
相对于图17所示的位置而言更靠近活塞403
″
,因此磁性元件420更靠近电子电路416,后者检测前者并打开led 450以确认工件p已被抓持。通过停用抓持器400来使部件返回到图16的初始位置。
[0149]
因此,即使在抓持器400中,传感器412的弹簧421也仅在工件p被拾取时被压缩,而在夹爪406、407的所有其它位置,弹簧421没有被大幅压缩。弹簧421与电子电路416和磁性元件420配合,以采用有效、无误且简单的方式区分工件p的抓持状态。
[0150]
即使在抓持器400中,夹爪406、407周围的空间也保持完全可用,因为它不受传感器412的阻碍。即使对于抓持器400,传感器412也不需要昂贵。
[0151]
基于所提供的示例,可以考虑使用以下方法来检测工业操纵器抓持器的夹爪之间有无工件。该方法基于这样的事实:在夹爪的远端之间没有传统解决方案中提供的磁传感器112、212、312、412,而是精确地有待搬运的工件p,磁传感器112、212、312、412在不同位置在功能上插置在抓持器的致动器与夹爪的近端或肩部之间。
[0152]
传感器112、212、312、412由磁性元件120、220、320、420和弹性元件121、221、321、421制成,磁性元件120、220、320、420可单一地根据夹爪106-107、206-207、306-307、406-407的相对位置相对于相应的电子检测电路116、216、316、416运动,弹性元件121、221、321、421抵抗磁性元件120、220、320、420相对于电子电路116、216、316、416的接近。通过正确选择弹性元件,即选择其施加的正确力,抓持器构造成使得弹性元件121、221、321、421仅在抓持器100、200、300、400实际保持工件p时才受到压缩。
[0153]
这种方法有两个主要优点:
[0154]-相对于磁性元件定位在活塞上并且因此传感器必须属于模拟或低滞后类型的传统解决方案,根据本发明的方法也可以用更便宜的数字开-关传感器来实施,因为弹性元件121、221、321、421保证了正确的操作,即它保证了传感器112、212、312、412只有在工件p实际位于抓持器的夹爪106-107、206-207、306-307、406-407之间时才生成工件p的抓持信号;
[0155]-与磁性元件定位在抓持器夹爪上的传统解决方案相比,根据本发明的方法可以通过将与致动器接触的传感器112、212、312、412定位在不占空间的位置来实施。
[0156]
图1-20示出了具有两个夹爪的抓持器100、200、300、400的示例,但一般而言,本发明也适用于仅具有一个夹爪或具有一个以上的夹爪的抓持器,例如具有三个径向夹爪的抓
持器。
[0157]
图1-20示出了具有气动致动器的抓持器100、200、300、400的示例,但一般而言,本发明也适用于具有液压或电动致动器的抓持器。
[0158]
图21-25示出了根据本发明的抓持器的第五实施例500,申请人保留为其提交分案专利申请的权利。在这种情况下,它也是角式抓持器500,其中两个夹爪506和507响应于空气活塞503施加的应力而相对于主体501在相应的销508、509上摆动,空气活塞503作为致动器操作并且在主体501中的缸502内部沿纵向方向交替地运动。
[0159]
基本上是预加载弹簧的弹性元件511在活塞503相对于销508、509的相对侧插置在两个夹爪506、507之间,以在活塞503在缸502中回移时使夹爪506、507进入打开位置。换言之,弹簧511在夹爪506、507的远端506
″
和507
″
上施加推力以将它们张开,并且活塞503借助于楔形部分510在夹爪506、507和肩部506
′
、507
′
上施加推力,楔形部分510刚好在肩部506
′
和507
′
之间滑动以将它们张开,从而抵抗由弹簧511施加的力。
[0160]
抓持器500包括气动型传感器512。传感器512又包括可以固定到夹爪506的肩部506
′
上的第一部分513和借助于销519铰接到第一部分513上的第二部分518。优选为弹簧的弹性元件521插置在传感器512的两个部分513和518之间。
[0161]
管道513
′
被限定在第一部分513中并且可以借助于喷嘴连接到外部真空源,例如抽气机或真空泵,使得可以在管道513
′
中产生低压或真空。
[0162]
例如由橡胶制成的、如图所示优选为球形的遮蔽器520插入传感器512的第二部分518中;与配备有用于检测磁性元件的电子电路的上述解决方案不同,在气动传感器512中未提供通过霍尔效应来检测磁性元件,而是提供了管道513中的压力值(特别是低压)的检测,如稍后将描述的。
[0163]
第二部分518具有旨在像滑块一样与活塞503的楔形部分510相互作用的倒圆部分。活塞503的往复运动导致传感器512的第二部分518相对于第一部分513转动,并因此导致遮蔽器520相对于第一部分513移位,并因此相对于管道513
′
移位。
[0164]
当夹爪506、507处于图23所示的闭合位置时,活塞503的楔形部分510停靠在限位止挡件522上。另一方面,在图24所示的工件p的抓持位置,活塞503的楔形部分510未触碰限位止挡件522。
[0165]
在图21和22中,示出了抓持器500的夹爪506和507由于弹簧511施加的推力而打开。在图23中,示出了抓持器500的夹爪506和507由于活塞503施加的推力而闭合。在图24中,示出了抓持器500的夹爪506和507处于工件p的抓持位置,即工件p由远端506
″
和507
″
保持。
[0166]
图25是抓持器500的分解透视图。可以看出,第一部分513被穿孔以允许销519沿着平行于销508和509的轴线插入。夹爪506的近侧部分或肩部506
′
的形状像叉子并且也穿设有彼此面对的孔515,并且设置在传感器512的第一部分513的侧面上的弹性突起514卡入这些孔中。孔518
′
穿过传感器512的第二部分518,以容纳销519并允许实现与第一部分513的铰链联接。在第二部分518上设置有用于分别容纳弹簧521和遮蔽器220的两个座。合适的阻挡表面524防止第一部分513在传感器512正确装配到夹爪506的肩部506
′
上时相对于夹爪506的肩部506
′
转动。附图标记525表示传感器512、特别是第二部分518的倒圆部分,其旨在像滑块一样在活塞513的楔形部分510上运动,从而第二部分518相对于第一部分513相对地
转动。
[0167]
特别参照图23和24,当抓持器500被致动时,即当活塞503迫使夹爪506、507闭合时,可能发生两种情况:
[0168]-在第一种情况下,抓持器500不拾取工件p,如图23所示。在传感器512的第一部分513和第二部分518之间限定了一个角度并且遮蔽器520不封闭管道513
′
。设计成检测管道513
′
中的低压的特殊外部仪器检测例如对应于-0.3bar的第一值;
[0169]-在第二种情况下,抓持器在夹爪506和507之间拾取并保持工件p。由于夹爪506施加的推力,传感器512的第二部分518抵接第一部分513,并且遮蔽器520封闭管道513
′
。外部仪器检测管道513
′
中例如对应于-0.8bar的第二低压值。
[0170]
因此,传感器512的操作简单并且基于对管道513
′
中的压力(低压)值的检测:测量值的变化将抓持器500已正确地拾取工件p的情况与抓持器500已被无用地致动而没有拾取工件p的情况进行区分。
[0171]
即使在该第五实施例500中,夹爪506、507周围的空间也保持完全自由:传感器512没有装配到夹爪506、507的远端506
″
或507
″
上,即它没有装配到夹爪506、507的必须与待搬运的工件p相互作用的部分上。
[0172]
传感器512也可以由市场上容易获得的便宜的部件制成,并且另外具有以下优点:可以通过外部装置读取管道513
′
中的压力值,该外部装置连接到传感器512,甚至远程定位并且非常准确,恰好由于没有装配在抓持器500上而不容易受到位移和应力的影响。