1.本实用新型涉及自适应技术领域,特别涉及一种柔性自适应力矩锁定夹爪。
背景技术:
2.自适应就是在处理和分析过程中,根据处理数据的数据特征自动调整处理方法、处理顺序、处理参数、边界条件或约束条件,使其与所处理数据的统计分布特征、结构特征相适应,以取得最佳的处理效果的过程,自适应过程是一个不断逼近目标的过程,它所遵循的途径以数学模型表示,称为自适应算法,通常采用基于梯度的算法,其中最小均方误差算法尤为常用,在机械加工的领域中,自适应可作为对不同操作时的适应程度,从而可自动调节至适应的方式,在对一些工件夹持的过程中,自适应可增加在机械加工时的便捷程度,同时在便捷程度的基础上提高加工的效率,增加一些机械加工工件的使用寿命和功能。
3.在工业加工的过程中,在对一些工件进行加工时需要进行夹持,在夹持时需要使用到夹爪,综上所述,现有的夹爪不具备柔性自适应的功能,在对工件进行夹持时需要使用到特定的夹持工具进行夹持,由于生产的工件不同,需要的夹持工具也会有许多种类,使用者需要经常更换夹爪,无法快捷的对工件进行加工,在对不同形状的工件进行夹持时,无法根据工件的形状与工件的表面紧密接触,从而会造成在对工件夹持的过程中容易脱落的现象,或在对工件夹持的过程中由于夹持力过大还会对一些脆弱的工件造成损坏,或因所需的驱动力矩超出舵机负载造成舵机损坏,同时还增加了加工的成本,减少了实用性和便捷性,无法达到柔性自适应的效果。
技术实现要素:
4.本实用新型提供一种柔性自适应力矩锁定夹爪,旨在解决现有的夹爪不具备柔性自适应的功能,在对工件进行夹持时需要使用到特定的夹持工具进行夹持,由于生产的工件不同,需要的夹持工具也会有许多种类,使用者需要经常更换夹爪,无法快捷的对工件进行加工,在对不同形状的工件进行夹持时,无法根据工件的形状与工件的表面紧密接触,从而会造成在对工件夹持的过程中容易脱落的现象,或在对工件夹持的过程中由于夹持力过大还会对一些脆弱的工件造成损坏,或因所需的驱动力矩超出舵机负载造成舵机损坏,同时还增加了加工的成本,减少了实用性和便捷性,无法达到柔性自适应的问题。
5.本实用新型是这样实现的,一种柔性自适应力矩锁定夹爪,包括驱动舵机,所述驱动舵机的前侧固定连接有舵盘,所述舵盘的两侧均活动连接有夹持摇臂,所述夹持摇臂的底部固定连接有自适应柔性夹头。
6.为了达到便捷对驱动舵机进行安装的目的,作为本实用新型的一种柔性自适应力矩锁定夹爪优选的,所述驱动舵机的顶部和底部均固定连接有安装板,所述安装板的前侧开设有安装孔,所述安装孔的数量为四个。
7.为了达到使舵盘与夹持摇臂进行连接的目的,作为本实用新型的一种柔性自适应力矩锁定夹爪优选的,所述舵盘前侧的两侧均固定连接有转杆,所述转杆的表面活动连接
有摇杆,所述摇杆的表面与夹持摇臂的内壁活动连接。
8.为了达到方便调节夹持摇臂和对夹持摇臂进行定位的目的,作为本实用新型的一种柔性自适应力矩锁定夹爪优选的,所述夹持摇臂的内壁固定连接有转轴,所述摇杆套设于转轴的表面。
9.为了达到对夹持摇臂进行稳固和定位的目的,作为本实用新型的一种柔性自适应力矩锁定夹爪优选的,所述两个夹持摇臂相对的一侧之间活动连接有多功能连接座,所述多功能连接座用于稳定两个夹持摇臂。
10.为了达到避免夹持摇臂在运转的过程中发生卡死现象的目的,作为本实用新型的一种柔性自适应力矩锁定夹爪优选的,所述夹持摇臂的内壁固定连接有固定杆,所述多功能连接座套设于固定杆的表面。
11.为了达到减少固定杆与多功能连接座之间的摩擦和碰撞的目的,所述多功能连接座前侧的两侧均开设有活动孔,所述活动孔的内壁与固定杆的表面活动连接。
12.与现有技术相比,本实用新型的有益效果是:
13.该柔性自适应力矩锁定夹爪,通过设置驱动舵机,能够为整个夹持的部分提供动力,舵盘可通过驱动舵机进行转动,从而可使两个夹持摇臂进行调节,两个夹持摇臂的转动带动自适应柔性夹头转动,使自适应柔性夹头能够根据不同工件的形状与工件的表面紧密接触,避免在对工件的夹持过程中发生工件掉落的现象,同时两个夹持摇臂通过多功能连接座可保持相同的运转,从而可实现相对运动的功能,使其能够适应多种工件,在对工件进行加工时更加的便捷,能够紧密的夹持工件,同时避免对一些较脆弱的工件造成损伤,同时减少了加工时的成本,增加了实用性和便捷性,方便了使用者的使用。
附图说明
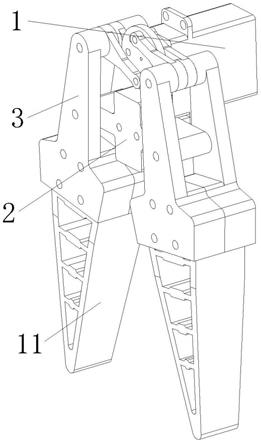
14.图1为本实用新型的柔性自适应力矩锁定夹爪的整体结构图;
15.图2为本实用新型局部结构的立体图;
16.图3为本实用新型局部结构的分解图;
17.图4为本实用新型图2中a处的局部放大图;
18.图5为本实用新型图2中b处的局部放大图。
19.图中,1、驱动舵机;2、多功能连接座;3、夹持摇臂;4、摇杆;5、舵盘;6、安装孔;7、转杆;8、安装板;9、转轴;10、固定杆;11、自适应柔性夹头;12、活动孔。
具体实施方式
20.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
21.在本实用新型的描述中,需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另
有明确具体的限定。
22.请参阅图1-5,本实用新型提供技术方案:一种柔性自适应力矩锁定夹爪,包括驱动舵机1,驱动舵机1的前侧固定连接有舵盘5,舵盘5的两侧均活动连接有夹持摇臂3,夹持摇臂3的底部固定连接有自适应柔性夹头11。
23.在本实施例中:通过设置驱动舵机1,能够为整个夹持的部分提供动力,舵盘5可通过驱动舵机1进行转动,从而可使两个夹持摇臂3进行调节,两个夹持摇臂3的转动带动自适应柔性夹头11转动,使自适应柔性夹头11能够根据不同工件的形状与工件的表面紧密接触,避免在对工件的夹持过程中发生工件掉落的现象,同时两个夹持摇臂3通过多功能连接座2可保持相同的运转,从而可实现相对运动的功能,使其能够适应多种工件,在对工件进行加工时更加的便捷,能够紧密的夹持工件,同时避免对一些较脆弱的工件造成损伤,同时减少了加工时的成本,增加了实用性和便捷性,方便了使用者的使用。
24.作为本实用新型的技术优化方案,驱动舵机1的顶部和底部均固定连接有安装板8,安装板8的前侧开设有安装孔6,安装孔6的数量为四个。
25.在本实施例中:通过设置安装板8和安装孔6的配合使用,能够使驱动舵机1在安装时更加的便捷和稳定,使其在安装过后不会发生偏斜和晃动的现象,通过安装孔6可对螺丝进行定位,使螺丝在安装的过程中能够更好更快捷的定位,增加了实用性和稳定性,方便了使用者的使用,达到了便捷对驱动舵机1进行安装的目的。
26.作为本实用新型的技术优化方案,舵盘5前侧的两侧均固定连接有转杆7,转杆7的表面活动连接有摇杆4,摇杆4的表面与夹持摇臂3的内壁活动连接。
27.在本实施例中:通过设置转杆7和摇杆4的配合使用,能够使舵盘5能够通过摇杆4和转杆7与夹持摇臂3进行连接,使舵盘5在转动的过程中可带动夹持摇臂3进行调节,同时可使两个夹持摇臂3呈相对的角度进行调节,增加了调节时的稳定性,方便了使用者的使用,达到了使舵盘5与夹持摇臂3进行连接的目的。
28.作为本实用新型的技术优化方案,夹持摇臂3的内壁固定连接有转轴9,摇杆4套设于转轴9的表面。
29.在本实施例中:通过设置转轴9,能够使摇杆4套设于转轴9的表面,夹持摇臂3可通过转轴9与舵盘5之间进行活动连接,夹持摇臂3可进行转动,在转动的过程中更加的稳定,同时还可对夹持摇臂3进行定位,防止夹持摇臂3在调节的过程中发生偏斜的现象,增加了夹持摇臂3的稳定性,达到了方便调节夹持摇臂3和对夹持摇臂3进行定位的目的。
30.作为本实用新型的技术优化方案,两个夹持摇臂3相对的一侧之间活动连接有多功能连接座2,多功能连接座2用于稳定两个夹持摇臂3。
31.在本实施例中:通过设置多功能连接座2,能够使夹持摇臂3在调节的过程中,避免其发生脱落的现象,使其在调节的过程中不会发生偏斜,增加了夹持摇臂3在运转时的稳定性,两个夹持摇臂3在进行相对运转时也不会发生角度运转不同的现象,舵盘5与夹持摇臂3在特定转角度形成力矩锁定结构,增加了稳定性,达到了对夹持摇臂3进行稳固和定位的目的。
32.作为本实用新型的技术优化方案,夹持摇臂3的内壁固定连接有固定杆10,多功能连接座2套设于固定杆10的表面。
33.在本实施例中:通过设置固定杆10,能够使多功能连接座2与夹持摇臂3之间可呈
活动连接,使夹持摇臂3在运转的过程中不会发生卡死的现象,在夹持摇臂3运转的过程中,通过固定杆10还可使多功能连接座2更好的对夹持摇臂3进行稳固,增加了实用性,方便了使用者的使用,达到了避免夹持摇臂3在运转的过程中发生卡死现象的目的。
34.作为本实用新型的技术优化方案,多功能连接座2前侧的两侧均开设有活动孔12,活动孔12的内壁与固定杆10的表面活动连接。
35.在本实施例中:通过设置活动孔12,能够使夹持摇臂3在调节的过程中,减少多功能连接座2与固定杆10之间的摩擦和碰撞,同时还可起到对多功能连接座2的定位效果,使夹持摇臂3在运转的过程中不会发生卡死的现象,增加了夹持摇臂3在运转时的稳定性,方便了使用者的使用,达到了减少固定杆10与多功能连接座2之间的摩擦和碰撞的目的。
36.工作原理:在使用时,当使用者需要根据工件进行自适应的调节时,驱动舵机1运转带动舵盘5转动,舵盘5的转动带动两个转杆7转动,转杆7的转动带动夹持摇臂3通过转轴9进行转动,两个夹持摇臂3呈相对运动,两个夹持摇臂3的转动带动自适应柔性夹头11转动,通过多功能连接座2、固定杆10和活动孔12的配合使用,使两个夹持摇臂3在转动的过程中不会发生偏斜,使夹持摇臂3和自适应柔性夹头11直至转动到与工件接触的位置,从而可使自适应柔性夹头11对工件进行夹持,保持与工件紧密接触的状态,避免工件发生掉落,同时减少对工件的损伤,在对不同工件进行夹持的过程中,能够根据不同的形状进行自适应的调节,使其能够适应多种工件,在对工件进行加工时更加的便捷,同时减少了加工时的成本,增加了实用性和便捷性,方便了使用者的使用。
37.以上仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。