1.本发明涉及一种手术机器人。
背景技术:
2.近些年国内外均发展出了骨科手术机器人,该机器人借助术中的x光透视,术中或术前的ct图像,光学双目追着系统等多种不同的技术手段,获取病人的三维姿态信息,完成导航和定位功能。具有定位精准、微创、手术时间短、操作简单、易掌握等突出优势。
3.然而,目前的大多数骨科手术机器人前端器械只有一个,固定安装在机械臂末端的法兰上。该器械配套一组参数记录在机械臂的上位机中,如果更器械,则对应的参数也需要更改。当有多个器械时,就需要更换参数,非常麻烦,甚至会选错参数,影响手术机械人的正常使用,给手术带来风险。另一方面,当手术需要多个前端器械时,多个前端器械的更换操作较为繁琐复杂,并且容易出现装配误差问题,进而也会对手术造成一定影响。
技术实现要素:
4.本发明的目的在于解决上述问题,提供一种手术机器人,可以更换前端器械,解决现有技术中前端器械更换时参数更改、选择复杂的问题。
5.本发明的另一个目的在于,解决现有技术中更换前端器械时误差大、装配精度难以保证的问题。
6.为实现本发明的上述目的,本发明提供一种手术机器人,包括机械臂,机械臂前端具有法兰,还包括与前端器械以及位于所述机械臂和所述前端器械之间连接所述机械臂与所述前端器械的转接装置;
7.所述前端器械包括前端把持装置和与所述前端把持装置相连接的连接装置,所述连接装置中设有存储芯片。
8.根据本发明的一个方面,所述连接装置上固定安装有连接件,沿着由所述连接装置向着所述转接装置的方向,所述连接件依次包括第一部分和第二部分;
9.所述第一部分的直径小于所述第二部分的直径。
10.根据本发明的一个方面,所述连接装置包括与所述把持装置相连接的第一连接部分和与所述转接装置相连接的第二连接部分;
11.所述存储芯片位于所述第一连接部分中,所述连接件安装在所述第二连接部分上。
12.根据本发明的一个方面,所述转接装置包括相互连接的第一转接部分和第二转接部分,所述第一转接部分与所述连接装置相连接,所述第二转接部分与所述机械臂相连接;
13.并且第一转接部分和所述第二转接部分转动连接,所述第一转接部分相对于所述第二转接部分可沿垂直于所述第二转接部分中心轴线方向旋转。
14.根据本发明的一个方面,所述转接装置上设有贯穿所述第一转接部分和第二转接部分的安装孔,所述连接件伸入所述安装孔中;
15.所述第一转接部分还设有与所述安装孔相连的锁紧槽;
16.所述锁紧槽与所述连接件的第一部分相配合。
17.根据本发明的一个方面,所述转接装置上设有贯穿所述第一转接部分和第二转接部分的安装孔,所述连接件伸入所述安装孔中;
18.所述第一转接部分还设有与所述安装孔相连的锁紧槽;
19.所述锁紧槽与所述连接件的第一部分相配合。
20.根据本发明的一个方面,所述第二转接部分上还设有与所述安装孔相连通的限位孔,所述限位孔中安装有限位螺栓与所述连接件的第二部分相抵靠。
21.根据本发明的一个方面,所述第二部分远离所述第一连接部分的一端设置为锥形结构。
22.根据本发明的一个方面,手术机器人还包括绝缘法兰,所述绝缘法兰位于所述机械臂的法兰与转接装置之间;
23.所述第二转接部分和所述绝缘法兰对应设有第二安装孔,所述绝缘法兰和所述法兰对应设有第三安装孔,所述二转接部分和所述绝缘法兰、所述绝缘法兰和所述法兰分别通过螺钉固定连接。
24.本发明的手术机器人,采用的前端器械中设有存储芯片,可读写数据,可记录前端器械的使用时间、使用次数等参数。当前端器械安装与机械臂连接安装后,机械臂上位机可以自动读取前端器械中存储芯片的数据,完成参数配置。如此,使得参数配置简单、便捷,并且不会出错。
25.本发明的手术机器人,可更换多种不同的前端器械,完成不同的功能,满足不同手术的需求,扩展机器人的手术适应类型。前端器械中的存储芯片可记录使用次数和使用时间,当到一定次数后提醒用户进行检修或校准,以免因为前端器械损耗产生的误差影响手术机器人的正常使用。存储芯片还能记录机械臂型号、参数、所有的运动状态和发生的错误(如自碰撞等),方便机械臂的后续维护和优化。
26.本发明的手术机器人,首先将连接件伸入到安装孔中,然后旋转第一转接部分,此时,第一转接部分上的锁紧槽随着旋转,进而可以与连接件的第一部分相配合,实现对于连接件的锁紧,从而可以防止连接件发生窜动,进而保证前端器械2与机械臂1连接的位置精度。另一方面,由于连接件的第一部分的直径小于第二部分的直径,当锁紧槽锁紧第一部分时,第二部分还可以在水平方向起到限位作用,进一步保证连接精度。
27.本发明的手术机器人,在机械臂上连接转接装置,将转接装置设置为包括第一转接部分和第二转接部分,通过将连接件伸入安装孔内,再旋转第一转接部分以利用锁紧槽对连接件锁紧定位,进而实现前端器械与机械臂的连接,可以保证针对不同的前端器械,更换操作方便快捷,同时相比于现有技术中螺钉连接等方式而言,能够保证前端器械重复安装的一致性,保证连接精度,避免装配误差较大对于手术操作造成不利影响。
28.本发明的手术机器人,前端器械上的连接件伸入安装孔中,并且连接件的第二部分伸出安装孔,此时,可以在限位孔中安装限位螺栓与连接件的第二部分相抵靠,从进一步对连接件进行限位,确保定位精度,同时保证使用过程的稳定性。根据本发明的一种实施方式,本发明连接件第二部分远离第一部分的一端,即与限位螺栓相抵靠的一端设置为锥形结构,从而使得限位螺栓与锥面相抵触,进一步提升结构稳定性。
附图说明
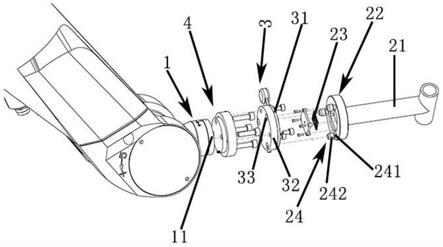
29.图1示意性表示根据本发明一种实施方式的手术机器人的组成结构图;
30.图2示意性表示根据本发明一种实施方式的手术机器人总装图;
31.图3示意性表示根据本发明一种实施方式的前端器械的结构示图;
32.图4示意性表示根据本发明一种实施方的转接装置的结构图;
33.图5示意性表示根据本发明一种实施方式的第二限位孔的结构图;
34.图6示意性表示根据本发明一种实施方式的转接装置与机械装配示图。
具体实施方式
35.为了更清楚地说明本发明实施方式或现有技术中的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是本发明的一些实施方式,对于本领域普通技术人员而言,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
36.在针对本发明的实施方式进行描述时,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”所表达的方位或位置关系是基于相关附图所示的方位或位置关系,其仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此上述术语不能理解为对本发明的限制。
37.下面结合附图和具体实施方式对本发明作详细地描述,实施方式不能在此一一赘述,但本发明的实施方式并不因此限定于以下实施方式。
38.结合图1和图2所示,本发明的手术机器人包括机械臂1、前端器械2和转接装置3,机械臂1具有法兰11,转接装置3位于前端器械2与机械臂1之间,用于连接前端器械2和机械臂1。
39.参照图1-图4所示,本发明的前端器械2包括前端保持装置21和与前端把持装置21相连接的连接装置22,连接装置22中设有存储芯片23。
40.本发明的手术机器人,采用的前端器械2中设有存储芯片23,可读写数据,可记录前端器械的使用时间、使用次数等参数。当前端器械2安装与机械臂1连接安装后,机械臂1上位机可以自动读取前端器械2中存储芯片23的数据,完成参数配置。如此,使得参数配置简单、便捷,并且不会出错。
41.结合图1-图3所示,本发明的连接装置22上固定安装有连接件24,前端器械2通过连接件24与转接装置3可拆卸连接。本发明的手术机器人可以根据需要更换不同的前端器械2,具体操作为,将前端器械2通过连接24与转接装置3进行拆分,更换下一个需要的前端器械2,将下一个需要的前端器械2的连接件24与转接装置3相连接。当然,根据本发明的构思,前端器械还可以连接多个操作器械,例如,在前端器械通道上连接一个刀具盘,在刀具盘上设置例如穿刺针、手术刀等不同的操作器械,以满足不同手术的需求。
42.在本发明中,沿着由连接装置22向着转接装置3的方向,连接件24依次包括第一部分241和第二部分242。根据本发明的一种实施方式,第一部分241和第二部分242均为圆柱体结构,第一部分241的直径小于第二部分242的直径。
43.根据本发明的构思,本发明的连接装置22可以设置与前端把持装置21一体成型构
造,也可以与前端把持装置21通过机械结构固定连接。同样地,根据本发明的一种实施方式,连接装置22还可以设置为包括与前端把持装置21相连接的第一连接部分221和与转接装置3相连接的第二连接部分222,第一连接部分221与前端把持装置21为一体成型构造,存储芯片23设置在第一连接部分221中,连接件24设置在第二连接部分222上。
44.结合图1-6所示,根据本发明的一种实施方式,本发明的转接装置3包括顺序连接的第一转接部分31和第二转接部分32,第一转接部分31与连接装置2相连接,第二转接部分32与机械臂1相连接。
45.在本实施方式中,第一转接部分31和第二转接部分32设置为形状相同、整体呈圆盘形结构,第一转接部分31和第二转接部分32转动连接,具体来说,第一转接部分31设置为可沿垂直于第二转接部分32中心轴线方向旋转。以图1所示为例,第一转接部分31和第二转接部分32竖直设置,第一转接部分31相对于第二转接部分32可沿竖直方向往复旋转一定角度。
46.结合图1、图4和图6所示,本发明的转接装置3上设置有安装孔33,安装孔33贯穿第一转接部分31和第二转接部分32。前端器械2在与转接装置3连接时,前端器械2连接装置22上的连接件24伸入到安装孔33中。而转接装置3的第一连接部份31上还设有与安装孔33相连的锁紧槽311,锁紧槽311与连接件24的第一部分241相适配。
47.本发明的手术机器人,前端器械2与转接装置3的连接过程如下,首先将连接件24伸入到安装孔33中,然后旋转第一转接部分31,此时,第一转接部分31上的锁紧槽311随着旋转,进而可以与连接件24的第一部分241相配合,实现对于连接件24的锁紧,从而可以防止连接件24发生窜动,进而保证前端器械2与机械臂1连接的位置精度。另一方面,由于连接件24的第一部分241的直径小于第二部分242的直径,当锁紧槽311锁紧第一部分241时,第二部分242还可以在水平方向起到限位作用,进一步保证连接精度。
48.本发明的手术机器人,在机械臂1上连接转接装置3,将转接装置3设置为包括第一转接部分31和第二转接部分32,通过将连接件24伸入安装孔33内,再旋转第一转接部分31以利用锁紧槽311对连接件24锁紧定位,进而实现前端器械2与机械臂1的连接,操作方便,便于前端器械的高温医用消毒。同时可以保证针对不同的前端器械2,更换操作方便快捷,同时相比于现有技术中螺钉连接等方式而言,能够保证前端器械2重复安装的一致性,保证连接精度,避免装配误差较大对于手术操作造成不利影响。
49.如图4所示,本发明的转接装置3的第一转接部分31上还设有限位槽312,第二转接部分32上设有限位件321伸入限位槽312内,起到对于第一转接部分31旋转限位作用。
50.结合图1、图2和图5所示,根据本发明的一种实施方式,本发明的第二转接部分32上还设有限位孔322,限位孔322与安装孔33相连通,限位孔322内安装限位螺栓323。
51.具体来说,前端器械2上的连接件24伸入安装孔33中,并且连接件24的第二部分242伸出安装孔33,此时,可以在限位孔322中安装限位螺栓323与连接件24的第二部分242相抵靠,从进一步对连接件24进行限位,确保定位精度,同时保证使用过程的稳定性。
52.另一方面手术机器人可更换或同时安装多种不同的前端器械2,完成不同的功能,根据本发明的一种实施方式,可以同时安装麻醉穿刺针、手术刀和套筒,以满足不同手术的需求,扩展机器人的手术适应类型。前端器械2中的存储芯片23可记录使用次数和使用时间,当到一定次数后提醒用户进行检修或校准,以免因为前端器械23损耗产生的误差影响
手术机器人的正常使用。存储芯片23还能记录机械臂1型号、参数、所有的运动状态和发生的错误(如自碰撞等),方便机械臂1的后续维护和优化。
53.根据本发明的一种实施方式,本发明连接件24第二部分242远离第一部分241的一端,即与限位螺栓323相抵靠的一端设置为锥形结构,从而使得限位螺栓323与锥面相抵触,进一步提升结构稳定性。
54.根据本发明的构思,本发明转接装置3的第二转接部分32可以与机械臂1的法兰11通过螺栓固定连接。当然,根据本发明的构思,本发明转接装置3的第二转接部分32与机械臂之间还可以设置其他连接结构。例如,根据本发明的一种实施方式,在第二转接部分32与机械臂1之间设有绝缘法兰4,起到隔离机械臂1与器械之间的电气绝缘作用。
55.以上所述仅为本发明的一个实施方式而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。