1.本实用新型涉及机器人技术领域,特别是一种射箭机器人的箭矢发射机构。
背景技术:
2.随着科技的进步,现代社会已出现了各种各样的机器人,其中包括与人一起进行游戏的机器人。让人与机器人一起进行游戏和比赛,大大激发了人的参与积极性,并能使人从中学到许多科技知识,因此游戏机器人已出现在各种科技场馆,各种各样的游戏机器人正吸引着广大游客特别是青少年们,带给他们无穷的欢乐和有用的知识。
3.射箭是我国人民的传统游戏和比赛项目,但是和其它运动项目相比,喜好射箭的人相对较少。主要原因是射箭运动多为单人运动,缺乏竞技性,难以唤起人们的兴趣。因此,开发一种射箭机器人,满足射箭爱好者的需求,唤起大众对射箭运动的爱好,并使参与者在与射箭机器人射箭比试中得到知识和快乐显得非常有意义。
4.对于射箭机器人而言,箭矢发射机构的结构设计射箭机器人的设计重点,射箭机器人的研发者希望箭矢发射机构具有较好的工作稳定性和可靠性,并且能很方便的调节箭矢发射角度。
技术实现要素:
5.本实用新型的目的是克服现有技术的不足,而提供一种射箭机器人的箭矢发射机构,它应用于射箭机器人,作为射箭机器人的重要组成部分,用于箭矢发射,为射箭机器人的正常运行提供了必要的结构支持。
6.本实用新型的技术方案是:射箭机器人的箭矢发射机构,包括机架、发射架、推板、弹性元件、角度调节气缸、推板复位气缸、推板限位舵机及挡板;机架为方形框架,其前端两角和后端两角处分别设有轮子安装区域;发射架在后端与机架铰接,发射架上部设有沿发射架前后方向布置的箭矢容纳槽,箭矢容纳槽的一端设有朝向发射架前端的射箭口,箭矢容纳槽的底部设有与箭矢容纳槽延伸方向一致的条形限定通道,发射架下部固设有与条形限定通道延伸方向一致的导向杆;推板上设有供导向杆穿过的导向孔,推板活动安装在发射架上,并可沿条形限定通道移动,其上端位于箭矢容纳槽中,其下端通过导向孔与导向杆活动连接;弹性元件一端连接在推板上,另一端连接在发射架的前端部;角度调节气缸设在机架与发射架之间,角度调节气缸的缸体铰接在机架上,其活塞杆端头与发射架铰接,其活塞杆伸缩以带动发射架绕铰接处转动;推板复位气缸的缸体固定安装在发射架下端,并相对靠近发射架前端部,推板复位气缸的活塞杆平行于条形限定通道的延伸方向伸出,其活塞杆正对推板,其活塞杆伸出以推动推板向发射架后端部移动;推板限位舵机固定安装在发射架下端,并相对靠近发射架后端部,推板限位舵机的机轴垂直于条形限定通道的延伸方向向上伸出布置;挡板固连在推板限位舵机的机轴上,并位于发射架下端,挡板在推板限位舵机的驱动下转动,进而进入或退出推板的移动路径。
7.本实用新型进一步的技术方案是:弹性元件为弹簧。
8.本实用新型进一步的技术方案是:弹性元件为橡皮筋。
9.本实用新型再进一步的技术方案是:导向杆的数量不少于两根,所有的导向杆相互平行布置。
10.本实用新型具有如下优点:
11.1、其应用于射箭机器人,用于箭矢发射,为射箭机器人的正常运行提供了必要的结构支持。
12.2、其通过导向杆与导向孔的配合结构为推板提供了良好的移动导向,进而保证了箭矢发射机构的可靠性和稳定性。
13.3、其通过角度调节气缸启动发射架绕铰接处转动,进而实现了发射角度的调节。
14.应用了本实用新型的射箭机器人具有如下优点:
15.所述射箭机器人可实现一组(3支)箭矢的自动抓取和连续发射,一组箭矢在整个发射流程中无需人工干预,智能化和自动化程度较高,能使参与者在与射箭机器人的射箭比试中得到知识和快乐,有利于射箭运动的推广。
16.以下结合图和实施例对本实用新型作进一步描述。
附图说明
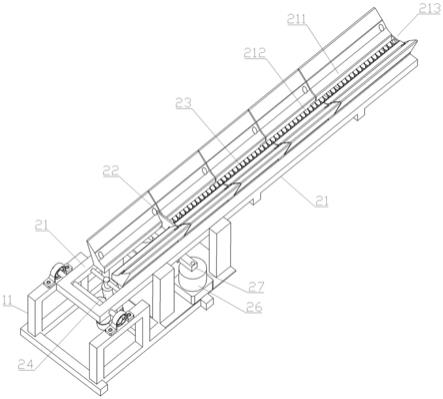
17.图1为本实用新型在一种视角下的结构示意图;
18.图2为本实用新型在另一视角下的结构示意图;
19.图3为机架的结构示意图;
20.图4为应用了本实用新型的射箭机器人的结构示意图;
21.图5为射箭机器人的箭矢存储转移机构在一种视角下的结构示意图;
22.图6为射箭机器人的箭矢存储转移机构在另一视角下的结构示意图;
23.图7为射箭机器人的箭矢抓取运输机构的结构示意图;
24.图8为射箭机器人的夹爪的结构示意图。
25.图例说明:机架11;轮子安装区域111;前轮12;前轮驱动机构13;后轮14;后轮驱动机构15;发射架21;箭矢容纳槽211;条形限定通道212;射箭口213;推板22;弹性元件23;角度调节气缸24;推板复位气缸25;推板限位舵机26;挡板27;底板31;镂空孔311;端板32;u形缺口321;边板旋转舵机33;边板34;拨杆旋转舵机35;拨杆36;箭矢储存槽37;排箭口38;滑轨411;滑块412;同步带驱动电机4131;同步带4132;主动轮4133;从动轮4134;旋转驱动电机421;夹爪安装座422;夹爪423;基座4231;c形半边爪4232;齿轮4233;开合驱动电机4234。
具体实施方式
26.实施例1:
27.如图1-3所示,射箭机器人的箭矢发射机构,包括机架11、发射架21、推板22、弹性元件23、角度调节气缸24、推板复位气缸25、推板限位舵机26及挡板27。
28.机架11为方形框架,其前端两角和后端两角处分别设有轮子安装区域111。
29.发射架21在后端部与机架11铰接,发射架21上部设有沿发射架21前后方向布置的箭矢容纳槽211,箭矢容纳槽211的一端设有射箭口213,射箭口213朝向发射架21前端,箭矢容纳槽211的底部设有与箭矢容纳槽211延伸方向一致的条形限定通道212,发射架21下部
固设有与条形限定通道212延伸方向一致的导向杆(图中未示出)。
30.推板22上设有供导向杆穿过的导向孔,推板22活动安装在发射架21上,并可沿条形限定通道212移动,其上端位于箭矢容纳槽211中,其下端通过导向孔与导向杆活动连接。
31.弹性元件23一端连接在推板22上,另一端连接在发射架21的前端部。
32.角度调节气缸24设在机架11与发射架21之间,角度调节气缸24的缸体铰接在机架11上,其活塞杆端头与发射架21铰接,其活塞杆伸缩以带动发射架21绕铰接处转动。
33.推板复位气缸25的缸体固定安装在发射架21下端,并相对靠近发射架21前端部,推板复位气缸25的活塞杆平行于条形限定通道212的延伸方向伸出,其活塞杆正对推板22,其活塞杆伸出以推动推板22向发射架21后端部移动。
34.推板限位舵机26固定安装在发射架21下端,并相对靠近发射架21后端部,推板限位舵机26的机轴垂直于条形限定通道212的延伸方向向上伸出布置。
35.挡板27固连在推板限位舵机26的机轴上,并位于发射架21下端,挡板27在推板限位舵机26的驱动下转动,进而进入或退出推板22的移动路径。
36.优选,导向杆的数量不少于两根,所有的导向杆相互平行布置。所有的导向杆共同为推板22提供移动导向,确保推板22移动过程中的稳定性,进而提升了箭矢发射机构的稳定性和可靠性。
37.优选,弹性元件23为弹簧或橡皮筋,并通过拉伸/张紧时的弹力提供推板向机架前端移动的动力。
38.优选,推板限位舵机26的数量为两个,两个推板限位舵机26分布在推板22两侧并相对布置,相应的,挡板27的数量为两块,两块挡板27分别连接在两个推板限位舵机26的机轴上,共同用于阻拦或放行推板22。
39.本实用新型应用于射箭机器人,作为射箭机器人的重要组成部分,用于箭矢发射,所述射箭机器人的结构简述如下。
40.如图1-8所示,射箭机器人,包括可移动机架、箭矢发射机构、箭矢存储转移机构及箭矢抓取运输机构。
41.可移动机架包括机架11、前轮12、前轮驱动机构13、后轮14及后轮驱动机构15。机架11为方形框架,其前端两角和后端两角处分别设有轮子安装区域111。两个前轮12分别设在机架11前端两角处的轮子安装区域111内。两组前轮驱动机构13分别与两个前轮12关联,以驱动两个前轮12独立转动。两个后轮14分别设在机架11后端两角处的轮子安装区域111内。两组后轮驱动机构15分别与两个后轮14关联,以驱动两个后轮14独立转动。
42.箭矢发射机构设在机架11中部,其上的箭矢容纳槽211沿机架11前后方向布置,其上的射箭口213朝向机架11前端。箭矢发射机构的具体结构如上文所述,不再赘述。
43.箭矢存储转移机构设在机架11两侧,并位于箭矢发射机构的两侧上端,其上设有沿机架11前后方向布置的箭矢储存槽37,箭矢储存槽37在靠近箭矢容纳槽的一侧设有可敞开或封闭的排箭口38。箭矢存储转移机构用于临时存储待发射的箭矢或将存储的箭矢通过排箭口38推出。所述箭矢储存槽37由底板31、端板32和边板34合围而形成。箭矢存储转移机构包括底板31、端板32、边板旋转舵机33、边板34、拨杆旋转舵机35及拨杆36。底板31宽度方向的一侧固接在机架11上端侧边处,宽度方向的另一侧向机架11中部下端倾斜,底板31长度方向为从机架11前端部向机架11后端部延伸,底板31长度方向中部设有镂空孔311。端板
32平行于底板31的宽度方向固定安装在底板31上,并垂直于底板31布置,并位于底板31相对靠近机架11后端部的一端,端板32在相对靠近机架11中部的一侧设有u形缺口321。边板旋转舵机33固定安装在底板31上,并位于底板31相对靠近机架11后端部的一端。边板34一端固接在边板旋转舵机33的机轴上,另一端向机架11前端部延伸,并在边板旋转舵机33的驱动下做竖直平面内的转动,进而敞开或封闭排箭口38,当边板敞开排箭口38时,边板34离开端板32的u形缺口321,当边板34封闭排箭口38时,边板34嵌入端板32的u形缺口321。拨杆旋转舵机35固定安装在底板31下端,其机轴水平伸出。拨杆36固连在拨杆旋转舵机35的机轴上,并在拨杆旋转舵机35的驱动下做竖直平面内的转动,以通过镂空孔311伸入或退出底板31上端。
44.箭矢抓取运输机构设在机架11上部,并位于箭矢存储转移机构的上端。其包括箭矢抓取组件和移动驱动组件。箭矢抓取组件41上设有三个用于抓取或释放箭矢的抓取工位,三个抓取工位分别位于箭矢容纳槽211和两个箭矢储存槽37的正上方。移动驱动组件安装在机架11上部,并与箭矢抓取组件关联,以驱动箭矢抓取组件沿机架11的前后方向做水平往复移动。
45.移动驱动组件包括滑轨411、滑块412和同步带组件。两条滑轨411固定安装在机架11上端两侧,并从机架11前端部向机架11后端部延伸。两个滑块412分别滑动安装在滑轨411上,并相对布置。两组同步带组件分别安装在机架11上端两侧,并分别与两个滑块412关联,以驱动两个滑块412沿各自配合的滑轨411同步同向等速移动。同步带组件包括同步带驱动电机4131、同步带4132、主动轮4133及从动轮4134。同步带驱动电机4134固定安装在机架11前端部的上端。主动轮4133固定安装在同步带驱动电机4131的机轴上。从动轮4134可转动安装在机架11后端部的上端,同步带4132张紧绕设在主动轮4133与从动轮4134之间,并与滑块412固定连接。
46.箭矢抓取组件包括旋转驱动电机421、夹爪安装座422及夹爪423。两个旋转驱动电机421分别固定安装在两个滑块412上,两个旋转驱动电机421的机轴相对且同轴布置。夹爪安装座422两端分别与两个旋转驱动电机421的机轴连接,并被两个旋转驱动电机421驱动做竖直平面上的转动。三个夹爪423朝向一致间隔设置在夹爪安装座422上,所述三个抓取工位分别设在三个夹爪423内,所述抓取工位位于两个c形半边爪4232之间。夹爪423包括基座4231、c形半边爪4232、齿轮4233及开合驱动电机4234。基座4231固定安装在夹爪安装座422上。c形半边爪4232一侧设有内弧面,另一侧设有外弧面,一端设有转轴,另一端间隔布置有多个齿,相邻的齿之间设有缝,两个c形半边爪4232分别通过转轴可转动安装在基座4231两侧,并内弧面相对布置。当两个c形半边爪4232相向转动合拢时,两个c形半边爪4232的齿和缝交错插接。当两个c形半边爪4232背向转动打开时,两个c形半边爪4232的齿相互分离而形成开口。两个齿轮4233分别固定安装在两根c形半边爪4232上,并相互啮合,并分别与两根转轴同轴布置。开合驱动电机4234固定安装在基座4231上,并与两根转轴中的一根关联,以驱动转轴和与该转轴连接c形半边爪4232同步转动,并通过两个齿轮的啮合带动另一根转轴和另一个c形半边爪4232同步转动。
47.所述射箭机器人在执行射箭操作之前,处在初始状态,在初始状态下:
48.a、箭矢抓取组件位于机架11后端极限位置;夹爪423的两个c形半边爪4232的齿相互分离而形成开口,开口朝向机架11后端;
49.b、发射架21处于水平状态;推板22位于机架11后端,并被挡板27阻挡,而无法向机架11前端移动;
50.c、边板34处于封闭排箭口38的位置;拨杆36位于底板31下端。
51.所述射箭机器人的射箭操作如下:
52.s01,抓取一组箭矢:
53.a、将待发射的箭矢以箭头朝下的姿态竖直放置于夹爪423的开口内;
54.b、开合驱动电机4234启动,使夹爪423的两个c形半边爪4232合拢,将箭杆牢固夹持在夹爪423的两个c形半边爪4232之间;
55.本步骤中,将箭矢以箭头朝下的姿态竖直放置于箭筒(箭矢盛放容器)内,再移动箭筒或机架11,使箭杆伸入夹爪423的两个c形半边爪4232之间;
56.本步骤中,当箭矢被牢固夹持后,位于夹爪423上端的箭矢长度与位于夹爪423下端的箭矢长度之比为1:5;
57.本步骤完成时,三个夹爪423内分别夹持一支箭矢,共夹持三支箭矢。
58.s02,调整箭矢的位姿:
59.a、旋转驱动电机421启动,通过夹爪安装座422带动三个夹爪423向机架11前端上方转动90
°
,使三支箭矢翻转至水平状态,并位于箭矢抓取组件的上方,三支箭矢的箭尾均朝向机架11前端;
60.b、两个同步带驱动电机4131同步启动,驱动两个滑块412同步沿滑轨411向机架11前端移动,进而带着箭矢抓取机构和三支箭矢向机架11前端移动;
61.c、旋转驱动电机421启动,通过夹爪安装座422带动三个夹爪423转动180
°
,使三支箭矢翻转至水平状态,并位于箭矢抓取组件的下方,三支箭矢的箭头均朝向机架11前端;
62.d、两个同步带驱动电机4131同步启动,驱动两个滑块412同步沿滑轨411向机架11后端移动,进而带着箭矢抓取机构和三支箭矢向机架11后端移动;
63.本步骤中,a、b分步骤同时进行,即将箭矢从箭筒内抽出,同时避免了箭头移动轨迹干涉箭筒的内壁;
64.本步骤中,通过c、d分步骤,将三支箭矢移动至一个箭矢容纳槽211和两个箭矢储存槽37的正上方。
65.s03,投放三支箭矢:开合驱动电机4234启动,使夹爪423的两个c形半边爪4232分离而形成开口,三个夹爪423内的箭矢分别脱离夹爪423下落,中间的一支箭矢落入箭矢容纳槽211,旁边的两只箭矢落入箭矢存储槽38。
66.s04,调整箭矢抓取机构的位姿:
67.a、旋转驱动电机421启动,通过夹爪安装座422带动三个夹爪423转动180
°
,使三个夹爪423的开口转动至竖直朝上;
68.b、两个同步带驱动电机4131同步启动,驱动两个滑块412同步沿滑轨411向机架11后端移动,进而带着箭矢抓取机构向机架11后端移动;
69.c、旋转驱动电机421启动,通过夹爪安装座422带动三个夹爪423向机架11后端下方转动90
°
,使三个夹爪423的开口朝向朝向机架11后端;
70.本步骤中,a、b分步骤同时进行,将箭矢抓取机构移动至机架11后端极限位置,以避免箭矢抓取机构干涉发射架21的角度调节;
71.本步骤中,通过c分步骤使三个夹爪423做好夹持下一组箭矢的位姿准备。
72.s05,第一支箭矢发射:
73.a、角度调节气缸24的活塞杆伸出,以驱动发射架21绕铰接处转动,当发射架21转动至预设的角度时,角度调节气缸24停止动作;
74.b、推板限位舵机26启动,带动挡板27转动,使挡板27退出推板22的移动路径,推板22失去挡板27的阻挡后,在弹性元件23弹力作用下,沿着条形限定通道212向机架11前端快速移动,进而推动箭矢容纳槽211内的箭矢沿着箭矢容纳槽211向机架11前端移动,最终从箭矢容纳槽211前端的射箭口213发射出去;
75.c、角度调节气缸24的活塞杆缩回,以驱动发射架21绕铰接处转动,当发射架21转动至水平状态时,角度调节气缸24停止动作;
76.d、推板复位气缸25的活塞杆伸出,推动推板22克服弹性元件23的弹力,沿着条形限定通道212向机架11后端移动,当推板22移动至挡板27后端时,推板复位气缸25停止动作;
77.e、推板限位舵机26启动,带动挡板27转动,使挡板27进入推板22的移动路径;
78.f、推板复位气缸25的活塞杆缩回,使推板22失去推板复位气缸25活塞杆的顶推,推板22随即在弹性元件23的弹力作用下压紧在挡板27上;
79.本步骤中,挡板27朝向机架11后端的一端为挡板27后端,挡板27朝向机架11前端的一端为挡板27前端。
80.s06,第二支箭矢排入箭矢容纳槽:
81.a、其中一个箭矢存储转移机构的边板旋转舵机33启动,驱动边板34向上转动,离开端板32的u形缺口321,从而将排箭口38敞开;
82.b、上述箭矢存储转移机构的拨杆旋转舵机35启动,驱动拨杆36向上转动,通过镂空孔311伸入底板31上端,并拨动箭矢向排箭口38移动,并从排箭口38排出,排出的箭矢落入箭矢容纳槽211内;
83.c、上述箭矢存储转移机构的边板旋转舵机33启动,驱动边板34向下转动,嵌入端板32的u形缺口321,从而将排箭口38封闭;
84.d、上述箭矢存储转移机构的拨杆旋转舵机35启动,驱动拨杆36向下转动,通过镂空孔311退回到底板31下端;
85.本步骤中,c、d分步骤不分先后次序。
86.s07,第二支箭矢发射:重复s05步骤,将第二支箭矢发射出去。
87.s08,第三支箭矢排入箭矢容纳槽:重复s06步骤,将第三支箭矢排入箭矢容纳槽211。
88.s09,第三支箭矢发射:重复s05步骤,将第三支箭矢发射出去。
89.至此,通过上述的s01-s09步骤,即实现一组箭矢(3支)的连续发射。